 基于S3C2440A和WinCE 4.2操作系統實現數字尋北儀的應用方案
基于S3C2440A和WinCE 4.2操作系統實現數字尋北儀的應用方案
引言
地磁場是地球系統的基本物理場,人們從古代就開始利用地磁信息進行導航。地磁場為航空、航天、航海提供了天然的參考系,可應用于航天器或艦船的定位、定向以及姿態控制。利用地球磁場空間分布的磁導航技術簡便高效、性能可靠、抗干擾能力強,一直是世界發達國家不可缺少的基本定位手段。
MMC212xMC 是美新公司推出的一款集成信號處理模塊和I2C總線的2軸MEMS地磁傳感器。本文設計一種基于嵌入式系統ARM9和地磁傳感器MMC212xMG的數字尋北儀。
1 系統方案
為了保證尋北儀的優越性能,其控制處理模塊采用嵌入式系統。嵌入式系統一般應用在掌上儀器、便攜式系統等設計中,具有便利靈活、功能強大、嵌入性強等特點,可以實現運算、處理、存儲和控制等功能。嵌入式系統包括硬件和軟件兩部分,即嵌入式微處理器和嵌入式操作系統。本文設計的尋北儀采用S3C2440A微處理器和WinCE 4.2操作系統。
1.1 MMC212xMG地磁傳感器
MMC212xMG 是基于AMR(Anisotropic MagnetoResistive,各向異性磁阻)設計的2軸MEMS(Microelectromechanical System,微機電系統)地磁傳感器,集成信號處理模塊和I2C總線(400 kHz快速模式),可以方便地與其他控制器通信,而不需要A/D轉換和定時器。該傳感器可以測量的磁感應強度的范圍為-2~+2 Gs(1 Gs=10-4T),在3.0 V工作電壓和25℃的室溫條件下,其靈敏度為512計數/Gs。
1.2 S3C2440A微處理器
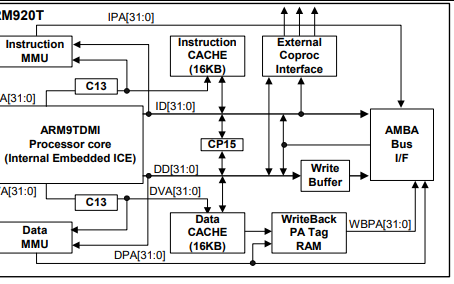
Samsung 公司的S3C2440A是一款基于ARM920T內核的32位RISC嵌入式微處理器。其主頻為400MHz,采用5級流水線結構,具有高速緩存和內存管理單元;提供豐富的外同資源,包括130個通用I/O接口和24路外部中斷源、NAND Flash接口、SDRAM接口、SD卡接口、100M以太網接口、USB接口、觸摸屏接口、CMOS圖像傳感器接口、SPI接口、I2C 接口、I2S接口、PWM功能、內嵌的LCD控制器、8通道的10位ADC、電源管理等。
1.3 WinCE 4.2操作系統
WinCE是微軟推出的嵌入式實時多任務操作系統。它延伸了臺式機Windows操作系統的外部特征,在內部用嵌入式實時操作系統的技術來實現Win32 API的子集,以簡潔、高效的完全搶占式多任務為核心,支持強大的通信和圖形顯示功能;而且它的平臺定制工具PlatformBuilder和應用軟件開發工具Embedded Visual C++都是非常強大實用的開發工具,為嵌人式便攜式儀表的軟件開發提供了一個標準的平臺。
1.4 方案設計
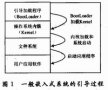
尋北儀的系統框圖如圖1所示。以S3C2440A為控制核心,通過I2C總線和地磁傳感器MMC212xMG通信。在WinCE 4.2嵌入式操作系統環境下,開發數據分析處理和顯示程序。
2 硬件設計
作者:高軍哲,潘孟春,田武剛,胡佳飛
MMC212xMG的工作電源范圍較寬,其中模擬電路工作電源 VDA的范圍為2.7~5.25 V,數字電路工作電源VDD的范圍為1.62~5.25 V。S3C2440A的工作電源為3.3 V,為了保證I2C總線的可靠通信,系統統一采用+3.3 V供電;同時,將+3.3 V分為模擬電源和數字電源,以提高系統的抗干擾能力。
MMC212xMG的引腳功能如表1所列。引腳1和8為工廠測試引腳,使用時可以不連接。引腳2連接10μF電容,引腳4和5之間連接1μF電容,實現芯片的設置/復位功能。引腳3和7分別為芯片的模擬電源和數字電源。引腳6為芯片的地線引腳。引腳9和10為I2C通信的時鐘引腳和數據引腳,上拉到數字電源。

MMC212xMG的工作電路如圖2所示,I2C總線引腳 9和10連接至S3C2440A。在I2C通信過程中,S3C2440A為主器件,MMC212xMG為從器件,主器件通過從器件地址尋址和特定的從器件通信,進行讀寫操作。
3 軟件設計
在嵌入式操作系統WinCE 4.2環境下,采用EVC開發地磁測量信息采集、處理和顯示程序,主要包括基于I2C總線的測量數據讀取、地磁測量信號的數據處理和虛擬儀表界面設計。
3.1 基于I2C總線的測量數據讀取
為了便于在I2C總線通信中連接多個地磁傳感器,MMC212xMG有4種不同的器件地址(工廠定義),分別為60H、64H、68H和6CH。本系統中所用到的器件地址為60H。MMC212xMG的內部寄存器有5個字節,第1個字節為器件控制命令寄存器,可以對其設定命令值來啟動相應的動作。各命令控制字定義如表2所列。
內部寄存器的第2和3個字節為X軸磁場測量值,第4和5個字節為Y軸磁場測量值。啟動MMC212xMG進行測量的命令流程如圖3所示。

在啟動測量命令完成后,延時10 ms,讀取測量數據。其流程如圖4所示。

3.2 地磁測量信號的數據處理
為了消除顯示上的抖動,可以采用均值濾波,即采集5次地磁測量信號,求出方位角后,取平均值送顯示。
為了提高指向的精度,可采取非線性校準技術。以45°為間隔,讓地磁傳感器模塊分別指向正北、東北、正東、東南、正南、西南、正西和西北8個方向,對這8個方向的地磁方位角測量多次取平均值后,存儲作為校準表。在實際測量過程中,獲得測量數據后,利用校準值對其進行線性插值,求取方位角。
3.3 虛擬儀表界面設計
尋北儀的顯示界面模擬機械式指南針進行設計,以達到顯示直觀的效果。EVC提供了豐富的界面繪圖API函數,可以輕易實現虛擬儀表界面的設計。軟件平臺在運行過程中,采用多線程技術實時讀取地磁傳感器的測量信息,經過數據處理后送虛擬儀表界面顯示。
4 系統演示
尋北儀實物圖如圖5所示。系統由兩部分組成:由S3C2440A構成的嵌入式系統模塊和由MMC212xMG構成的地磁傳感器模塊。圖5(a)為地磁傳感器模塊指向北的效果圖,圖5(b)為指向任意方位的效果圖。
在實際使用過程中,可以將嵌入式系統模塊和地磁傳感器模塊安裝成為一個整體,構成便攜式尋北儀;也可以分開安裝,嵌入式系統模塊同時獲取其他傳感器(如加速度傳感器、GPS傳感器等)的信息,構成組合導航系統。
結語
本文采用嵌入式微處理器S3C2440A和MEMS地磁傳感器MMC212xMG設計了一款數字尋北儀。該系統與機械式指南針相比,具有人機界面友好、不受慣性影響、數據可存儲等優點。經過長時間運行測試,尋北儀工作穩定,可以滿足高精度尋北要求。
責任編輯:gt
-
傳感器
+關注
關注
2551文章
51099瀏覽量
753606 -
操作系統
+關注
關注
37文章
6825瀏覽量
123333 -
微處理器
+關注
關注
11文章
2263瀏覽量
82457
發布評論請先 登錄
相關推薦
千兆網絡接口在S3C2440A系統中的應用方案
S3C2440A中文手冊,S3C2440A使用手冊
S3C2440A中文資料,datasheet
Blob在S3C2440A上的移植
S3C2440A嵌入式手持終端電源管理系統設計

基于S3C2440A的銀行評價器的設計
基于S3C2440A處理器的Windows CE系統快速啟動方案
基于S3C2440A的無線實時圖像傳輸系統設計

32位RISC微處理器S3C2440A的用戶手冊免費下載






 工商網監
工商網監
評論