 一種離子液體填充納米纖維鞘層的電化學人工肌肉纖維
一種離子液體填充納米纖維鞘層的電化學人工肌肉纖維
隨著軟體機器人和智能可穿戴電子設備的飛速發展,仿生智能纖維人工肌肉的研究和應用近來被廣泛研究。人工肌肉纖維具有與生物肌肉纖維相類似的功能和結構,在適當的外界刺激方式下,產生仿生物肌肉的感知傳感和反饋驅動動作。其在軟體機器人、智能穿戴以及輔助醫療等領域有重要的應用前景。針對全固態人工肌肉纖維驅動器和傳感器的結構設計、功能優化及應用場景展示等問題,中科院蘇州納米所邸江濤、李清文研究團隊開展了長期的研究,近期取得了新進展。
在目前研究的眾多人工肌肉纖維中,基于離子嵌入/脫出的電化學人工肌肉纖維由于其低的工作電壓,無明顯熱效應等特點而引起科研人員的濃厚興趣。但是基于目前的研究現狀,電化學人工肌肉纖維仍然面臨著一些挑戰。例如,目前的電化學人工肌肉纖維主要是基于液態的工作體系,無法在空氣中穩定的工作,這嚴重限制了電化學人工肌肉的應用范圍。
針對上述挑戰,中科院蘇州納米所邸江濤、李清文團隊從材料選擇和結構設計出發,構筑了一種離子液體填充納米纖維鞘層的電化學人工肌肉纖維。
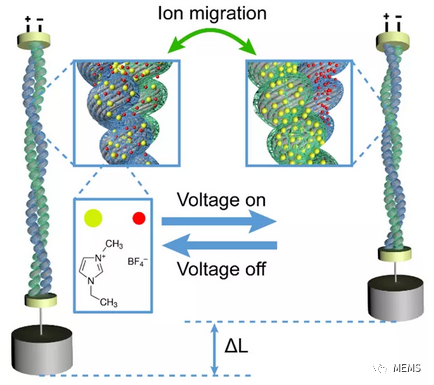
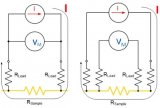
圖1 電化學人工肌肉的結構以及工作原理示意圖
該電化學人工肌肉纖維能夠在空氣中穩定工作,其結構以及工作原理如圖1所示。施加低電壓時,陰陽離子分別超正負電極遷移并嵌入,使得人工肌肉纖維收縮。當移除電壓時,陰陽離子從電極脫出,人工肌肉纖維恢復原長。
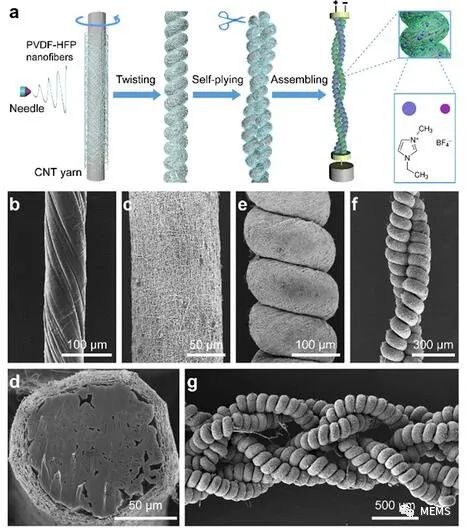
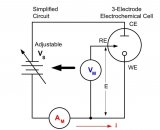
圖2 電化學人工肌肉纖維的制備流程及結構表征。a. 制備流程;b. CNT 纖維;c. PVDF-HFP/CNT纖維;d. PVDF-HFP/CNT纖維截面;e. 加捻后的PVDF-HFP/CNT纖維;f. 自絞合后的PVDF-HFP/CNT纖維;g. 集束后的PVDF-HFP/CNT纖維.
首先他們利用原位靜電紡絲技術,在碳納米管(CNT)纖維表面均勻沉積一層PVDF-HFP納米纖維。接著將PVDF-HFP/CNT復合纖維加捻成螺旋結構,通過自絞合、剪切等分別構成正負電極,浸泡離子液體后即形成電化學人工肌肉(圖2)。
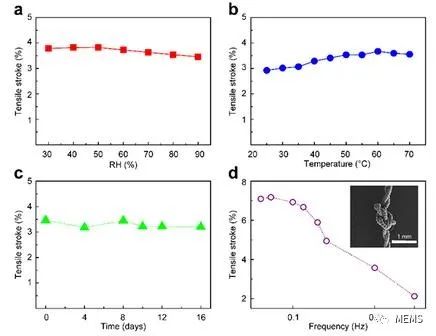
圖3 電化學人工肌肉纖維的穩定性表征
PVDF-HFP納米纖維層具有大量的孔隙結構,可以儲存大量的離子,同時具有良好的離子電導率。此外其還具有良好的機械性能,可以作為兩個電極之間的隔膜,從而避免了短路現象。離子液體具有寬的電化學窗口,低的蒸汽壓。因此離子液體填充納米纖維鞘層的電化學人工肌肉具有良好的穩定性。其可以在寬范圍的環境濕度和溫度下、長期儲存在空氣中,以及打結后均能夠穩定工作(圖3)。
圖4 電化學人工肌肉纖維的應用展示
基于該人工肌肉纖維良好的穩定性以及驅動性能,他們將這種穩定的電化學人工肌肉纖維作為驅動組件應用到仿生機器人器件中。圖4展示了仿生手臂和三爪抓手。通過集束增加輸出力,人工肌肉纖維可以提起自身重量近百倍的小啞鈴。將人工肌肉纖維與彈簧集成制備的三爪抓手,像人的手一樣可以抓取、保持、釋放重物。
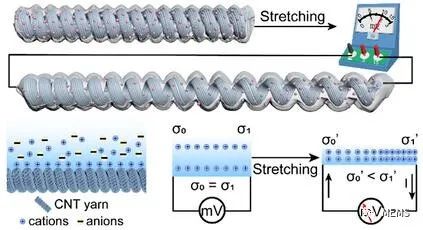
圖5 碳納米管纖維新型壓電離子纖維結構示意圖及其壓電離子效應產生機理
該成果以Strong and Robust Electrochemical Artificial Muscles by Ionic-Liquid-in-Nanofiber-Sheathed Carbon Nanotube Yarns為題發表在small上。論文第一作者是博士生任明,通訊作者為邸江濤研究員和李清文研究員,合作者包括香港理工大學陳韋教授。感謝鄧捷和孫一洋同學提供的幫助。
圖6 編入壓電離子纖維無源應變傳感器的智能手套與機械手的人機交互
此外,團隊成員發現單根碳納米管纖維在裹上凝膠電解質后具有獨特的壓電離子效應,對應變極其敏感,經歷不對稱拉伸時可在纖維兩端輸出毫伏級別高分辨率、低噪聲的電壓。基于此制備了一種新型全固態壓電離子纖維作為無源應力傳感器,其輸出傳感電壓的大小可通過拉伸頻率和拉伸應變來調節,具有寬頻(0.1-10 Hz)響應性和寬應變(1-80%)響應性。該團隊將此壓電離子纖維無源應力傳感器編入手套中,制備智能手套,可有效識別手勢動作并與機械手進行良好的人機交互。該成果以Gel-Electrolyte-Coated Carbon Nanotube Yarns for Self-Powered and Knittable Piezoionic Sensors為題發表在ACS Applied Electronic Materials上。論文第一作者是北航李敏教授和課題組博士生喬健,通訊作者為邸江濤研究員和李清文研究員。
以上工作得到了工作得到了國家重點研發計劃(2020YFB1312902,2016YFA0203301)、國家自然科學基金(21975281, 21773293,21603264)等科研項目的支持。
責任編輯:lq
-
傳感器
+關注
關注
2552文章
51330瀏覽量
755450 -
壓電傳感器
+關注
關注
1文章
103瀏覽量
15333 -
軟體機器人
+關注
關注
1文章
111瀏覽量
11737
原文標題:蘇州納米所在仿生人工肌肉和壓電傳感器研究方面取得新進展
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
掃描速率對各體系的電化學行為有什么影響
哈爾濱工業大學/南方科技大學:聚焦離子束制備高分辨率電化學-電致發光耦合雙極納米電極陣列傳感器

電化學測試方法詳解
電化學儲能的基本原理介紹
電化學儲能電池是燃料電池嗎
離子電極電化學土壤離子傳感器
壓縮空氣儲能屬于電化學儲能技術嗎
電化學儲能的特點包括哪些?電化學儲能的效率?
一種基于熵驅動雙足DNA walker的微米電極電化學傳感器

什么是電化學電容器?電化學超級電容器有什么特點?
詳解蔡司原位液體電化學顯微解決方案





 工商網監
工商網監
評論