 基于單片機和紅外遙控技術實現通用多址遙控系統的設計
基于單片機和紅外遙控技術實現通用多址遙控系統的設計
紅外遙控在家用電器、安全保衛、工業控制以及人們日常生活中廣泛應用,特別是家用電器、安全保衛。
當家里的電視或者VCD、DVD較多時,有時候用遙控器遙控它們,會產生沖突,發生誤操作。本來只想遙控當中的一臺機器,但是兩臺電視機或者一臺VCD(DVD)和一臺電視機同時受到遙控。仔細分析,這兩個設備產生沖突是由紅外編碼的問題引起的,由于它們有相同的地址編碼,所以會同時發生動作,這就造成了上述麻煩。解決問題的關鍵在于,給每個電器設置不同的地址編碼,當遙控時,先發送地址編碼,地址相同的才能接受動作,接受后續發來的數據,先選擇要遙控的對象,而后再按鍵執行相應的動作。
在本文介紹的設計中,用單片機模擬紅外遙控器編碼,從矩陣鍵盤輸入要遙控的地址,然后通過紅外發光二極管發射編碼信號,接收部分先把發射部分發射的編碼信號接收下來,再和自己本身的地址作比較,如果地址相同,則點亮一只二極管,表示地址相同,遙控成功;否則二極管仍舊是熄滅的。
此設計是根據紅外線遙控的原理設計的,可以在此基礎上設計出解決家用電器“打架”現象的電路系統,應用到實際生產中,因此具備一定的實用性。
一、紅外遙控的基本原理
紅外線遙控系統一般由發射器和接收器兩部分組成。發射器由指令鍵、指令信號產生電路、調制電路、驅動電路及紅外線發射器組成。當指令鍵被按下時,指令信號產生電路便產生所需要的控制信號,控制指令信號經調制電路調制后,最終由驅動電路驅動紅外線發射器,發出紅外線遙控指令信號。
接收器由紅外線接收器件、前置放大電路、解調電路、指令信號檢出電路、記憶及驅動電路、執行電路組成。當紅外接收器件收到發射器的紅外指令信號時,它將紅外光信號變成電信號并送到前置放大電路進行放大,再經過解調器后,由信號檢出電路將指令信號檢出,最后由記憶電路和驅動電路驅動執行電路,實現各種操作。
控制信號一般以某些不同的特征來區分,常用的區分指令信號的特征是頻率和碼組特征,即用不同的頻率或者編碼的電信號代表不同的指令信號來實現遙控。所以紅外遙控系統通常按照產生和區分控制指令信號的方式和特征分類,常分為頻分制紅外線遙控和碼分制紅外線遙控。
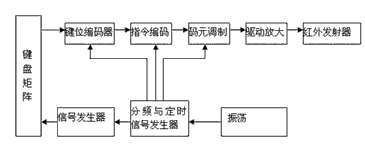
圖1 遙控發射部分組成
1 紅外遙控系統發射部分
紅外遙控發射器由鍵盤矩陣、遙控專用集成電路、驅動電路和紅外發光二極管三部分組成,結構如圖1所示。
當有鍵按下時,系統延時一段時間防止干擾,然后啟動振蕩器,鍵編碼器取得鍵碼后從ROM中取得相應的指令代碼(由0和1組成的代碼),遙控器一般采用電池供電,為了節省電量和提高抗干擾能力,指令代碼都是經32~56kHz范圍內的載波調制后輸出到放大電路,驅動紅外發射管發射出940nm的紅外光。當發送結束時振蕩器也關閉,系統處于低功耗休眠狀態。載波的頻率、調制頻率在不同的場合會有不同,不過家用電器多采用的是38kHz的,也就是用455kHz的振蕩器經過12分頻得到的。
遙控發射器的信號是由一串0和1的二進制代碼組成的,不同的芯片對0和1的編碼有所不同,現有的紅外遙控包括兩種方式:脈沖寬度調制(PWW)和脈沖位置調制(PPM或曼徹斯特編碼)。兩種形式編碼的代表分別是NEC和PHILIPS的RC-5。
2 紅外遙控系統接收部分
接收部分是由放大器、限幅器、帶通濾波器、解調器、積分器、比較器等組成的,比如采用較早的紅外接收二極管加專用的紅外處理電路的方法,如CXA20106,此種方法電路復雜,現在一般不采用。但是在實際應用中,以上所有的電路都集成在一個電路中,也就是我們常說的一體化紅外接收頭。一體化紅外接收頭按載波頻率的不同,型號也不一樣。由于與CPU的接口的問題,大部分接收電路都是反碼輸出,也就是說當沒有紅外信號時輸出為1,有信號輸出時為0,它只有三個引腳,分別是+5V電源、地、信號輸出。
二、系統的設計
1 單片機編碼發射部分
① 鍵盤部分
紅外遙控器的發射器電路比較簡單,由一個4×4矩形鍵盤、一個PNP驅動三極管、一個紅外線發光二極管和兩個限流電阻組成。要遙控哪臺接收器由鍵盤輸入,即由鍵盤輸入要紅外遙控的地址,地址經過編碼、調制后通過紅外發光二極管發射出去。
矩陣鍵盤部分由16個輕觸按鍵按照4行4列排列,將行線所接的單片機的I/O口作為輸出端,而列線所接的作為輸入。當沒有鍵被按下時,所有輸出端都是高電平,代表沒有鍵按下。有鍵按下時,則輸入線就會被拉抵,這樣,通過讀入輸入線的狀態就可以知道是否有鍵被按下。
鍵盤的列線接到P1口的低4位,行線接到P1口的高4位,列線P1.0~P1.3設置為輸入線,行線P1.4~P1.7設置為輸出線。
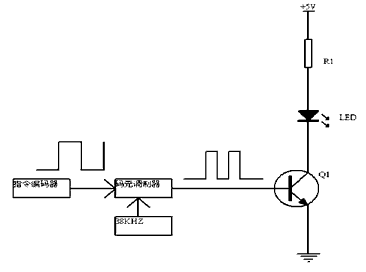
圖2 載波調制示意圖
● 檢測當前是否有鍵被按下。檢測的方法是使P1.4~P1.7輸出為0,讀取P1.0~P1.3的狀態,若P1.0~P1.3為全1,則無鍵閉合,否則有鍵閉合。
● 去除鍵抖動。當檢測到有鍵按下后,延時一段時間再做下一步檢測判斷。
● 若有鍵按下,應該識別出是哪一個鍵閉合。方法是對鍵盤的行線進行掃描。
P1.4~P1.7按下面4種組合依次輸出1110,1101,1011,0111,在每組行輸出時讀取P1.0~P1.3,若全為1,則表示0這行沒有鍵輸入,否則有鍵閉合。由此得到閉合鍵的行值和列值,然后采用計算的方法或者查表的方法將閉合鍵的行值和列值轉換成所定義的值。
● 為了保證每閉合一次CPU僅作一次處理,必須去除鍵釋放時的抖動。產生的鍵值放在發送數據庫區,30H存放的是產生的鍵值,即要遙控的8位地址共1字節,31H放的是和30H中的相同的8位地址,地址碼重發了一次,主要是加強遙控器的可靠性,如果兩次地址碼不相同,則說明本幀數據有錯,應該丟棄。32H放的是00H(為了編程簡單),33H放的是0FFH,一共32位數據。要發送數據時,只要到那里讀取數據即可,然后調用發射子程序發送。
②載波部分
根據前面介紹的紅外遙控的基本原理,紅外遙控器編碼調制的方法其實很簡單,只要生成一定時間長的電平就可以。再通過一個38kHz載波調制便可以發射編碼。載波的產生方法有多種,可以由CMOS門電路RC振蕩器構成,或者由555時基電路構成等。
在此次設計中采用的是CPU延時,即用定時器中斷完成,用單片機的T0定時產生38kHz載波。設定定時器為方式2,即自動恢復初值的8位計數器。TL0作為8位計數器,TH0作為計數初值寄存器,當TL0計數溢出時,一方面置1溢出標志位TF0,向CPU請求中斷,同時將TH0內容送入TL0,使TL0從初值開始重新加1計數。因此,T0工作于方式2,定時精度比較高。根據計算,設定38KHz的定時初值,采用12kHz晶振的定時初值為0F3H,用11.0592kHz晶振時的初值為0F4H,設定好定時器中斷,在中斷程序中只寫入取反P2.0(CPL P2.0),當要發送數據1時,前面560μs高電平發送時,先打開定時器中斷,再啟動定時器,允許定時器工作,延時560μs再關定時器,后面1690μs的低電平因為不發送信號,所以可以直接置P2.0高電平后,延時1690μs即可;數據0前面的560μs高電平和數據1的一樣,后面560μs的低電平因為不發送信號,所以可以直接置P2.0高電平后,延時560μs即可。
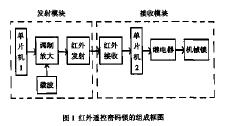
2 紅外接收解碼電路
紅外遙控接收采用一體化紅外接收頭,它將紅外接收二極管、放大器、解調、整形等電路安裝在一起,只有三個引腳。紅外接收頭的信號輸出端接單片機的INT0端,單片機中斷INT0在紅外脈沖下降沿時產生中斷。電路如圖3.3所示,圖中增加一只PNP三極管對輸出信號放大,R和C組成去耦電路抑制電源干擾。

圖3 一體化接收頭示意圖
3 遙控信號的解碼算法
平時,遙控器無鍵按下時,紅外發射二極管不發出信號,遙控接收頭輸出信號1,有鍵按下時,0和1的編碼的高電平經遙控接收頭反相后會輸出信號0,由于與單片機的中斷腳相連,將會引起單片機中斷(單片機預先設定為下降沿產生中斷)。
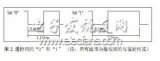
遙控碼發射時由9ms的高電平和 4.5ms的低電平表示引導碼,用560μs的高電平和560μs的低電平表示數據“0”,用560μs的高電平和1690μs的低電平表示數據“1”,引導碼后面是4字節的數據。接收碼是發射碼的反向,所以判斷數據中的高電平的長度是讀出數據的要點,在這里用882μs(560~ 1690μs之間)作為標尺,如果882μs之后還是高電平則表示是數據1,將1寫入寄存器即可(數據為1時還需要再延時一段時間使電平變低,用來檢測下一個低電平的開始)。882μs后電平為低電平則表示是數據0,則將0寫入寄存器中,之后再等待下一個低電平的到來。
繼續接收下面的數據,當接收到32位數據時,說明一幀數據接收完畢,然后判斷本次接收是否有效,如果兩次地址碼相同并且等于本系統的地址碼,數據碼和數據反碼之和等于0FFH,則接收的本幀數據有效,點亮一只發光二極管,否則丟棄本次接收到的數據。
接收完畢后,初始化本次接收到的數據,準備下次遙控接收。
三、結束語
本文設計的通用多址遙控系統達到了預先想到的性能要求,在實際應用中,可以在這個系統的基礎上設計紅外遙控信號自學習系統。首先要對設備的紅外遙控信號進行識別并存儲(自學習),然后在需要時進行還原。制成自學習系統后可以實現對錄相機和投影機、電視機遙控信號的自學習和還原,從而在多媒體遠程教學系統中實現可紅外遙控設備的控制。
責任編輯:gt
-
單片機
+關注
關注
6037文章
44558瀏覽量
635304 -
遙控器
+關注
關注
18文章
837瀏覽量
66126 -
工業控制
+關注
關注
38文章
1454瀏覽量
85852
發布評論請先 登錄
相關推薦
基于單片機的紅外遙控密碼鎖的設計與實現







 工商網監
工商網監
評論