 剖析如何做好一款4D高分辨毫米波雷達
剖析如何做好一款4D高分辨毫米波雷達
做好一款毫米波雷達本身是一個龐大的系統工程,所以我不可能會像標題那樣面面俱到講毫米波雷達的方方面面。這篇文章主要和大家聊聊如何從算法及功能層面做好4D 高分辨毫米波雷達(4D High Resolution Radar,以下簡稱4D Radar),咱們開始。
啥是4D Radar
首先4D指的是(range, velocity, azimuth,elevation),有時候有的廠家為了唬人,加上RCS這個維度,就成了5D radar,那么4D Radar相較于傳統毫米波雷達主要強勢在這一個方面:
cluster數目是傳統雷達的數十倍(一般為數萬cluster/秒),如此致密的cluster也就換了一個更洋氣的名字,點云(point cloud),隔壁激光雷達可能會投來鄙視的目光。。。
需要指出的是,做毫米波雷達不會一味追求點云數量,一味追求點云計算量上去了不說,也產生了許多冗余信息,沒必要。所以,這里的點云是指有效點云,也就是說,我們不僅要看點云的量,更要看點云的質。那如何提高點云數量及質量我們待會再聊。如此致密的點云使得4D雷達有時候又被稱為4D成像雷達(4D Imaging Radar)。
4D radar 能干啥
說白了,4D毫米波雷達最強勢的點就是提供高質量的點云,而高質量的點云卻極大得擴展了毫米波的應用范圍。
過去啊,毫米波雷達最多在ADAS混出個樣,也就是在L2,L3級別的自動駕駛刷刷存在感。再往上走,也就是高級別無人駕駛(L4,L5)就慘啦,低聲下氣,一直要看激光雷達的眼色,甚至還比不過攝像頭。即是好說歹說配備了毫米波雷達,往往也是做陪襯(數據融合,實際中對毫米波雷達的輸出往往置信度較低)。怎么辦,想出人頭地就得猥瑣發育,臥薪嘗膽。如今,4D Radar的推出無疑為毫米波雷達家族進入高級無人駕駛鋪平道路,提供了更多可能性!主要是4D雷達太能干了,不信請看:
環向毫米波雷達感知
Freespace
自動泊車(APS)
目標分類(Classification)
局部定位(Localization)
landmark based SLAM
以上功能都是過去毫米波雷達薄弱的點,也就是激光雷達鄙視毫米波雷達的底氣。往后我會逐一介紹每個功能應用的實現細節等。4D radar 目前什么水平目前國內外知名雷達廠商都在積極布局4D Radar,因為它確實代表未來的感知技術方向。國內玩家主要是先搞個樣機,展現一下強大的研發實力,估計也可以解決部分融資需求,但離量產還有距離。圖1 是國內森斯泰克點云雷達實測效果圖,可以看到點云及其致密,為豐富應用提供基礎。
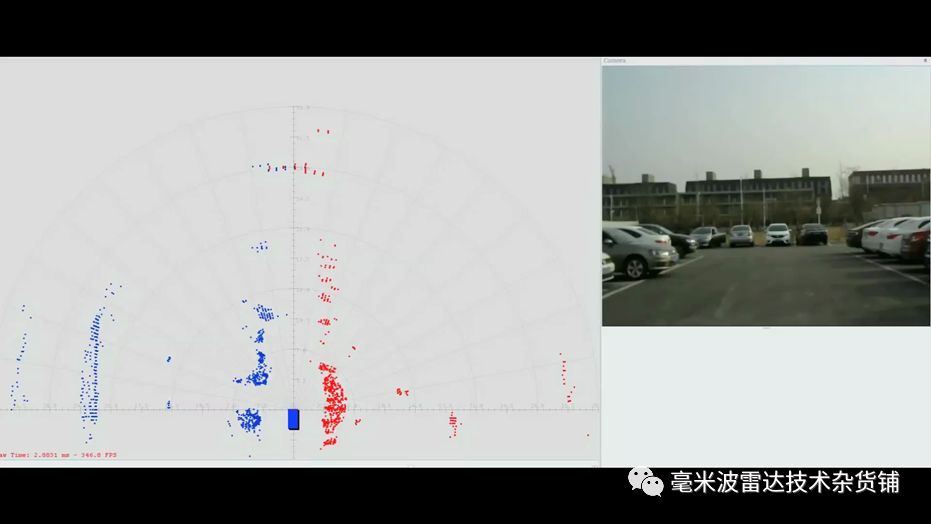
圖1 Sensor Technologies 4D Radar
如圖2所示,木牛科技于2019年也發布了一款點云雷達樣機,點云致密并且提供了高度(elevation)信息。
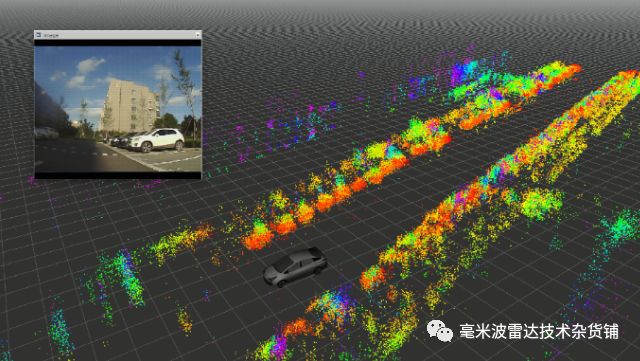
圖2 木牛科技4D radar效果圖
國外玩家更多,玩法也多種多樣,以后有空細聊,這里簡單介紹幾家有特色的。METAWAVE是當中戲比較多的,核心技術是利用超材料構建收發陣列,基于pencil beam的窄波束覆蓋整個FoV,并在算法層面引入AI Engine,實現一款高分辨智能雷達。
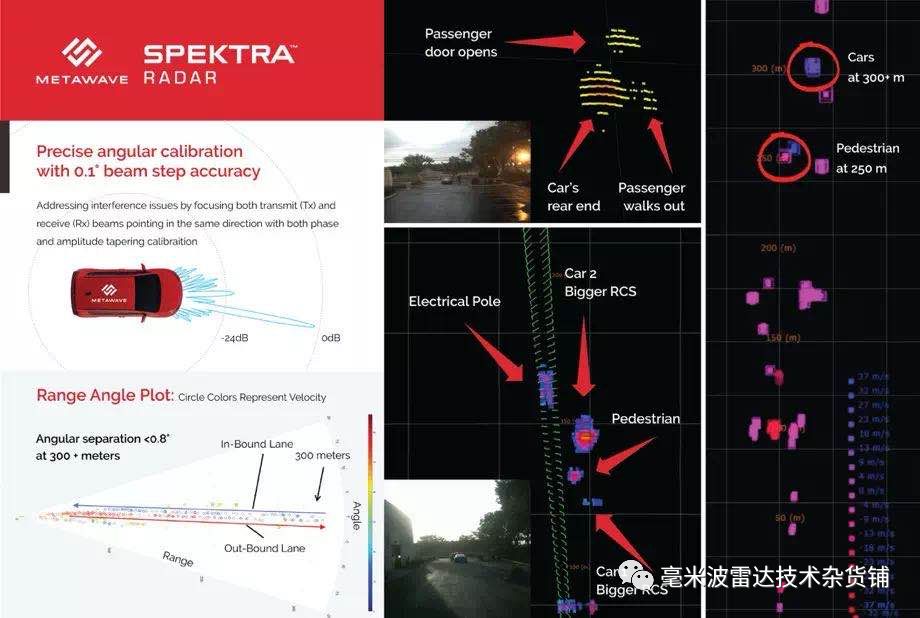
圖3 METAWAVE 點云雷達效果圖
此外,Cognitive,Arbe,Oculii,Uhnder,Vayyar,Lunewave,Echodyne等公司都在相繼研發
4D Radar.4D radar 算法怎么做
涉及雷達算法,我們暫且分為數據處理及信號處理,信號處理偏底層,更重要更基礎。我們會把重心放在這。雷達信號處理(Radar Signal Processing,RSP),主要要包含如下幾個方面RSP
- Antenna Array Design (Azimuth/Elevation)(ULA/NLA/MRA)
- MIMO Signal Processing(Channel Separation)
- Frequecy Estimation for Range & Doppler
- DoA(FFT/MUSIC/SSP)- CalibrationAntenna Array設計依賴功能需求,就4D Radar而言,給出的天線設計需要滿足無模糊方位角及俯仰角檢測條件外,對方位角的分辨率及精度提出高要求,往往分辨率要低于2度。MIMO Signal Processing核心問題是如何實現接收端發射通道分離,方法有很多,諸如BPM, TDM,CDM等等,但是各有各的問題,如何實現適合4D雷達的通道分離方案很重要。
Frequecy Estimation for Range & Doppler,對距離和速度的估計主要采用FFT+插值細化,對傳統毫米波雷達是夠了,而4D Radar還有上升空間。DoA,可以說是RSP最重要的一塊,沒有之一,DoA方法太多了,但是結合天線設計,給出一種高效,高分辨的DoA方法是具有相當挑戰性的,主流還是ULA+FFT,4D雷達為了高分辨,這種配置是不夠的。Calibration,校準對于多通道是必須的,校準對象,校準方法很多。比如Channel Error
Coupling Error
Position Error
Mount Error
Finite sampling errors
MicroDoppler, 基于毫米波雷達做目標分類目前是一個熱門研究方向,而諸如行人跑動等非剛體運動的Micro Doppler特征為目標分類提供強有力支撐,目前Conti的ARS 408 21SC3版本已經集成識別VRU的功能代碼,基于的特征主要是MicroDoppler。
編輯:jq
-
APS
+關注
關注
0文章
337瀏覽量
17510 -
4D
+關注
關注
0文章
61瀏覽量
11580 -
毫米波雷達
+關注
關注
107文章
1044瀏覽量
64367
原文標題:如何做好一款4D高分辨毫米波雷達
文章出處:【微信號:mwrfnet,微信公眾號:微波射頻網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
毫米波雷達的基頻和調制技術 毫米波雷達在機器人導航中的應用
康謀技術 | 毫米波雷達技術解析

正和微芯發布4D毫米波雷達SoC芯片RS6240
睿藍7獵光Max車型交付啟動,搭載12個超聲波雷達及5個4D毫米波雷達
毫米波雷達的作用 毫米波雷達與超聲波雷達的區別
經緯恒潤4D成像毫米波雷達亮相 CES 2024

4D毫米波成像雷達的測試要求都有哪些嗯?

中央域控雷達:4D雷達新時代






 工商網監
工商網監
評論