") 基于C8051F121芯片設計環(huán)形線圈車輛檢測器的應用方案
基于C8051F121芯片設計環(huán)形線圈車輛檢測器的應用方案
1 引言
隨著我國交通基礎設施建設加速發(fā)展的勢頭,交通量在快速增長,隨之而來的便是道路擁堵、大氣污染.以及交通事故帶來的危害。為緩解道路擁堵、改善出行條件、提高道路安全性.智能交通控制系統(tǒng)作為一種非現(xiàn)場執(zhí)法手段.可對闖紅燈、超速、逆行、違章變道行駛、壓黃線等多種違法現(xiàn)象起到迅速的監(jiān)控、抓拍、遠程傳輸.為迅速的獲取違章證據及時處理交通違章,提供行之有效的監(jiān)測手段.為減少和避免交通事故的發(fā)生起到積極作用。因此.在文章中所開發(fā)的車輛檢測器.其作用是為智能交通控制系統(tǒng)提供足夠的信息以便于最優(yōu)的控制。從智能交通控制系統(tǒng)的應用形式上可以看出智能車輛檢測器是交通信息采集的一個重要組成部分。
2 車輛檢測器
車輛檢測器是高速公路和城市交通道路監(jiān)控系統(tǒng)中不可缺少的組成部分.主要是通過數據采集和設備監(jiān)視等方式.向監(jiān)控系統(tǒng)中的信息處理和信息發(fā)布單元提供各種交通參數.作為監(jiān)控中心分析、判斷、發(fā)出信息和提出控制方案的主要依據。因此,車輛柃測器及其檢測技術水平的高低直接影響到公路交通監(jiān)控系統(tǒng)的整體運行管理水平。
目前我們在現(xiàn)場應用的環(huán)形線圈車輛檢測器.是一種基于電磁感應原理的車輛檢測器.它的傳感器是一個埋在路面下.通有一定丁作電流的環(huán)形線圈(一般為2米x l米)。當車輛通過環(huán)形地埋線圈或停在環(huán)形地埋線圈上時.車輛自身鐵質切割磁通線,引起線閣同路電感壁的變化.榆測器通過檢測該電感變化量就可以檢測出車輛的存在.檢測這個電感變化量一般來說有兩種方式:一種是利用相位鎖存器和相位比較器,對相位的變化進行檢測.另一種方式則是利用由環(huán)形地埋線圈構成回路的耦合電路對其振蕩頻率進行檢測。我們這里采用了后一種檢測方式。正常情況下.機動車輛沒處在環(huán)形地埋線圈所在位置的時候.耦合電路振蕩頻率保持恒定.在單位時間段測得的脈沖個數基本保持不變.當機動車輛經過環(huán)形地埋線圈所在位置時.由于耦合電路振蕩頻率的增大.使得單片機在單位時間段測得的脈沖個數也相應增加。設地埋線圈所在位置無機動車時單位時間段單片機測得的脈沖個數為PN.當機動車輛經過地埋線圈所在位置時單位時間段單片機測得的脈沖個數為PM.脈沖增量△E為PM與PN的差值即△E=PM-PN,脈沖增量的經驗閥值△T預先設定在EEPROM中.當△E≥△T時認為有車.△E《△T時認為無車,從而判斷有無車輛通過當前車道。
3 車輛檢測器硬件設計
該車輛檢測器是如圖1所示以C8051F121芯片為主的應用系統(tǒng)。各通道經74HC18三線譯碼芯片選擇后使能產生振蕩信號.圖2所示電路產牛的該振蕩信號再經集成運算LM293整形電路(圖3)整形后形成脈沖信號,送人C8051F121芯片的ECI引腳.利用可編程計數器和捕捉模塊功能啟動定時器T0對上述脈沖信號進行計數,判斷有無車輛通過當前車道。當有車輛經過時.車輛狀態(tài)在車輛檢測器的面板上顯示,并通過C8051Fl21芯片的UART0接口經MAX202串口芯片(圖4)轉換成標準的RS232信號.將車輛狀態(tài)數據發(fā)送到上位機中,經后臺軟件處理.實現(xiàn)違章車輛的抓拍功能。在應用中,把紅燈信號板發(fā)送過來的RS422信號經MAX488芯片轉換后的信號送到C8051F121芯片的UARTI接口.再將接收到的數據通過UART0接口發(fā)送到上位機中。
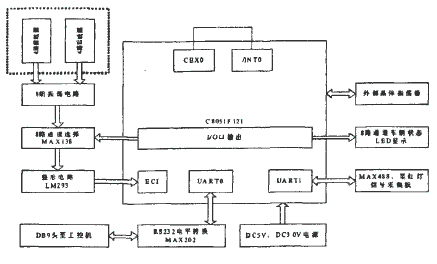
圖1車輛檢測器原理圖
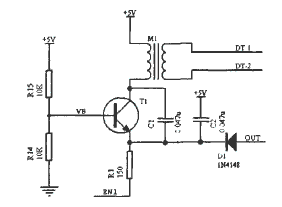
圖2振蕩電路
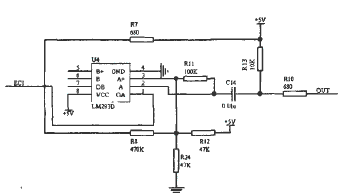
圖3脈沖整形電路
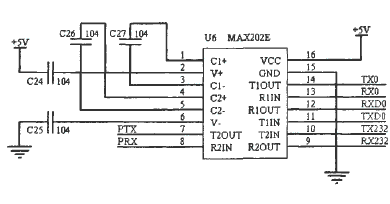
圖4 RS232電平轉換電路
車輛檢測器的工作方式:可編程計數器陣列(PCAO)能夠提供增強的定時器功能.它需要較少的CPU干預。PCAO包含一個專用的16位計數器,定時器和6個16位捕捉/比較模塊(CEXn)且每個捕捉/比較模塊有其自己的I/O線。本設備選用CEX0模塊,被編程為8位脈沖調制(PWM)輸出的獨立工作方式,當PCAO計數器/定時器的低字節(jié)(PCAOL)與PCAOCPL0中的值相等時.CEXO的輸出為高電平。當PCAOL中的計數值溢出時,CEXO輸出被置為低電平。當計數器/定時器的低字節(jié)PCAOL從0xFF到0x00溢出時,保存在計數器/定時器高字節(jié)(PCAOCPLHO)中的值被自動裝入PCAOCPLO,不需軟件干預。選擇外部通道振蕩器輸出信號經脈沖整形電路整形后的脈沖信號(EC1)作為可編程計數PCA的時基。
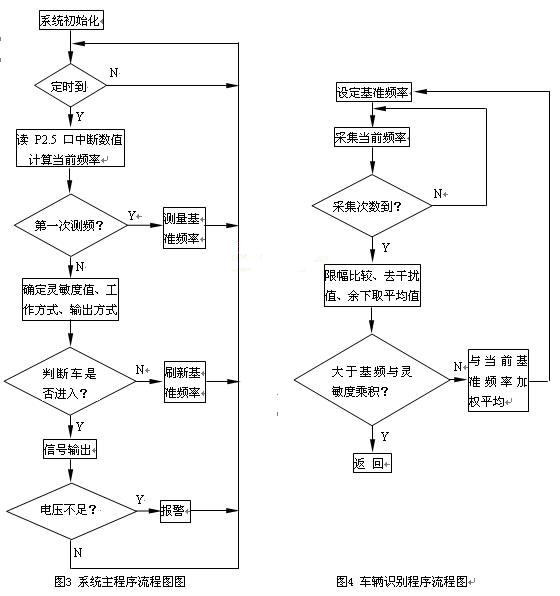
4 車輛檢測器軟件設計
在圖5的流程中可以知道.采用地感線圈作為車輛采樣的振蕩電路輸出頻率經LM393整形后作為ECl0的輸入脈沖,ECI負跳變有效.當CEX0輸出為1(即/INTO=1)且 TR0=1時啟動定時器喲計數功能.在相應的時間段內對ECl0輸入的脈沖進行計數.作為當前的車輛采樣值.通過與系統(tǒng)運行時的初始化值(無車狀態(tài)時)與經驗值相比較.從而判斷出當前車道中有無車輛通過該地感線圈。當有車輛經過并被檢測到后,及時更新車輛狀態(tài)數據.同時顯示在車輛檢測器的面板上,并通過RS232口(板卡的COMl口)發(fā)送到嵌入式計算機系統(tǒng)的COM1.后臺軟件接收到車輛狀態(tài)信號判斷出是處于紅燈信號時間段內.根據設置的違章表象啟動數碼相機,通過USB數據線發(fā)送抓拍指令.從而獲得違章車輛的三張連續(xù)圖片。

圖5基本流程圖
5 結論
環(huán)形線圈車輛檢測器是目前國際上使用范圍最廣的車輛檢測器.他以技術成熟、易于掌握、計數準確等優(yōu)點成為最流行的車輛檢測器。本文基于美國Silicon Lab公司的CIP-51TM微控制器核的片上系統(tǒng)(SOC)C8051F121芯片為核心的硬件平臺,文中對設備的硬件電路設計,接口電路設計和軟件設計進行全方面的論述和研究。實驗結果證明該設備具有低功耗、低成本、功能強大的特點.充分利用了該芯片提供的資源,并且滿足了智能車輛檢測器的需求。
責任編輯:gt
-
芯片
+關注
關注
455文章
50817瀏覽量
423680 -
數據采集
+關注
關注
39文章
6108瀏覽量
113662 -
監(jiān)控系統(tǒng)
+關注
關注
21文章
3915瀏覽量
174739
發(fā)布評論請先 登錄
相關推薦
IC結構分析C8051F349芯片解密研究
環(huán)形線圈車輛檢測器有什么優(yōu)缺點?
怎么實現(xiàn)基于C8051F121在智能車輛檢測器中的設計?
C8051F120/C8051F121/C8051F123/
智能環(huán)形線圈車輛檢測器的設計與實現(xiàn)
基于C8051F單片機信號發(fā)生器設計與應用
基于MSP430行駛車輛檢測器的設計

地磁車輛檢測器的應用領域_地磁車輛檢測器與其他車輛檢測技術的優(yōu)劣對比
基于TMS320F2812處理芯片和LC振蕩電路實現(xiàn)嵌入式車型檢測器的設計
C8051F串口升級程序






 工商網監(jiān)
工商網監(jiān)
評論