") 關(guān)于目標(biāo)檢測(cè)系統(tǒng)的應(yīng)用原理的分析與介紹
關(guān)于目標(biāo)檢測(cè)系統(tǒng)的應(yīng)用原理的分析與介紹
摘 要:為不斷完善和發(fā)展港口碼頭自動(dòng)化水平,提高軌道式集裝箱起重機(jī)的作業(yè)效率,對(duì)目標(biāo)檢測(cè)系統(tǒng)的應(yīng)用原理進(jìn)行分析介紹。目標(biāo)檢測(cè)系統(tǒng)激光器通過(guò)對(duì)周?chē)h(huán)境進(jìn)行掃描,采集數(shù)據(jù)點(diǎn)進(jìn)行處理判斷,對(duì)目標(biāo)物體生成對(duì)應(yīng)坐標(biāo)點(diǎn)反饋給控制器進(jìn)行控制,協(xié)同完成自動(dòng)作業(yè)任務(wù)。通過(guò)實(shí)際的系統(tǒng)應(yīng)用,結(jié)合軟件監(jiān)控對(duì)作業(yè)時(shí)優(yōu)缺點(diǎn)進(jìn)行分析,對(duì)故障分類(lèi)并總結(jié)對(duì)應(yīng)處理方法。關(guān)鍵詞:目標(biāo)檢測(cè)系統(tǒng);自動(dòng)化碼頭;激光器;故障處理;視覺(jué)處理中圖分類(lèi)號(hào):U691+.3 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1001-0785(2020)11-0069-06
0 引言
近年來(lái),自動(dòng)化集裝箱碼頭因其環(huán)保、高效、節(jié)能、穩(wěn)定、標(biāo)準(zhǔn)和經(jīng)濟(jì)被越來(lái)越多的港口所接受,從新加坡、荷蘭、日本、美國(guó)、德國(guó)、英國(guó)、澳大利亞到上海、廈門(mén)以及青島[1],國(guó)內(nèi)外大型港口逐步自動(dòng)化智能化促進(jìn)了全球港口集裝箱自動(dòng)化的發(fā)展,使港口不再是傳統(tǒng)的地域上的綜合物流樞紐,更是一個(gè)動(dòng)態(tài)化的拉動(dòng)區(qū)域增長(zhǎng)的支撐和引擎[2]。
目標(biāo)檢測(cè)系統(tǒng)(Target Detection System, 簡(jiǎn)稱(chēng)TDS)利用3D 激光技術(shù),配合轉(zhuǎn)動(dòng)馬達(dá),對(duì)目標(biāo)物體進(jìn)行精確掃描,達(dá)到目標(biāo)定位和設(shè)備保護(hù)的目的。無(wú)人自動(dòng)化碼頭興起以來(lái),對(duì)軌道式集裝箱起重機(jī)(以下簡(jiǎn)稱(chēng)軌道吊)自動(dòng)化技術(shù)研究越來(lái)越深入,為滿(mǎn)足堆場(chǎng)和無(wú)人集卡自動(dòng)抓放箱要求,對(duì)自動(dòng)化堆場(chǎng)的“眼睛”——自動(dòng)目標(biāo)檢測(cè)系統(tǒng)進(jìn)行升級(jí)改進(jìn)。其主要利用Sick 激光器的掃描功能,通過(guò)多個(gè)激光器協(xié)同配合,與軌道吊控制器相互配合,完成作業(yè)任務(wù)。其作業(yè)環(huán)境主要分為兩種,一種是在堆場(chǎng)中進(jìn)行抓放箱任務(wù),主要是通過(guò)在吊具高點(diǎn)對(duì)吊具兩側(cè)下方的堆場(chǎng)環(huán)境進(jìn)行掃描,判斷出下方原有集裝箱位置,再通過(guò)與控制器交互進(jìn)行命令交流,確保正常完成堆場(chǎng)任務(wù)。第二種是車(chē)道抓放箱任務(wù),主要是在車(chē)道最上方對(duì)下方車(chē)輛進(jìn)行激光掃描,當(dāng)有車(chē)輛時(shí),可通過(guò)掃描判斷是否為空車(chē)、集裝箱在車(chē)板的相對(duì)位置和車(chē)頭方向等,配合車(chē)輛引導(dǎo)系統(tǒng)對(duì)集卡進(jìn)行精確引導(dǎo)定位,再進(jìn)行收提箱操作。
自20 世紀(jì)70 年代以來(lái),國(guó)內(nèi)外對(duì)視覺(jué)識(shí)別和圖像檢測(cè)等問(wèn)題進(jìn)行不斷研究探索[3]Subramanian 聯(lián)合視覺(jué)系統(tǒng)和坐標(biāo)測(cè)量機(jī),將工件位置通過(guò)視覺(jué)系統(tǒng)測(cè)定發(fā)送給坐標(biāo)測(cè)量器[4],實(shí)現(xiàn)了視覺(jué)識(shí)別的作業(yè)應(yīng)用。Ballard 提出廣義霍爾變換的概念,通過(guò)目標(biāo)檢測(cè)。對(duì)邊覺(jué)與工業(yè)融合,使理論與實(shí)踐相適應(yīng)并用科技推動(dòng)生產(chǎn)進(jìn)步。
1 結(jié)構(gòu)原理
1.1 3D 掃描機(jī)構(gòu)
在軌道吊的小車(chē)架上安裝兩個(gè)轉(zhuǎn)動(dòng)機(jī)構(gòu),分別是遠(yuǎn)端轉(zhuǎn)動(dòng)機(jī)構(gòu)(司機(jī)室側(cè))和近端轉(zhuǎn)動(dòng)機(jī)構(gòu)(非電氣房側(cè))。
轉(zhuǎn)動(dòng)機(jī)構(gòu)和激光器一起安裝于小車(chē)平臺(tái)下方,其工作模式分為靜待掃描和動(dòng)態(tài)掃描兩種。靜態(tài)掃描時(shí)當(dāng)?shù)蹙咴谧罡唿c(diǎn),將要抓放箱時(shí),對(duì)下部環(huán)境進(jìn)行掃描,并將結(jié)果反饋給軌道吊控制器,判斷是否安全,同時(shí)對(duì)軌道吊進(jìn)行位置調(diào)整,準(zhǔn)備動(dòng)作;動(dòng)態(tài)掃描時(shí),吊具下降到臨近著箱,激光器再對(duì)下方環(huán)境進(jìn)行掃描,比對(duì)當(dāng)前位置是否安全,是否已滿(mǎn)足著箱外部條件,當(dāng)條件滿(mǎn)足時(shí)著箱,不滿(mǎn)足需配合吊具姿態(tài)調(diào)整模塊控制微動(dòng)電機(jī)調(diào)整,再次掃描著箱。3D 轉(zhuǎn)動(dòng)機(jī)構(gòu)通過(guò)CAN 通信進(jìn)行轉(zhuǎn)動(dòng)馬達(dá)控制,通過(guò)以太網(wǎng)與工控機(jī)進(jìn)行信息交互。通過(guò)CAN 光轉(zhuǎn)和以太網(wǎng)光轉(zhuǎn)進(jìn)行光電信號(hào)轉(zhuǎn)換完成信息遠(yuǎn)距離傳輸。整個(gè)系統(tǒng)由兩個(gè)3D 轉(zhuǎn)動(dòng)機(jī)構(gòu)組成,分為近端和遠(yuǎn)端,分別安裝在大車(chē)中線(xiàn)并距離小車(chē)中線(xiàn)1500 mm 的位置上,便于對(duì)整個(gè)工作環(huán)境同時(shí)掃描。
1.2 軟件監(jiān)控
1)實(shí)時(shí)監(jiān)控
如圖2 所示,TDS 監(jiān)控與激光器相對(duì)應(yīng),分為近端監(jiān)控和遠(yuǎn)端監(jiān)控,分別對(duì)兩個(gè)轉(zhuǎn)動(dòng)機(jī)構(gòu)發(fā)回的數(shù)據(jù)進(jìn)行顯示處理,并配合圖像一起顯示在監(jiān)控畫(huà)面右上方。集裝箱定位只需確定兩個(gè)參考點(diǎn),即邊長(zhǎng)方向中心線(xiàn)上距離寬邊等距兩點(diǎn),通過(guò)兩點(diǎn)的相對(duì)位置變化可明顯判斷集裝箱水平位置偏移情況。TDS 激光器采集的數(shù)據(jù),通過(guò)處理擬合出兩條邊線(xiàn),計(jì)算出規(guī)定距離的坐標(biāo)點(diǎn)。在軟件監(jiān)控界面顯示的為每個(gè)激光器數(shù)據(jù)計(jì)算點(diǎn)LeftCtrl和RigehtCtrl,為集裝箱一側(cè)的兩點(diǎn),經(jīng)處理后可得到最終兩點(diǎn)反饋給控制器。集卡定位同樣只需兩點(diǎn),邊長(zhǎng)中線(xiàn)上距離車(chē)頭和車(chē)尾固定位置的兩點(diǎn)。車(chē)尾寬度邊線(xiàn)由集卡引導(dǎo)系統(tǒng)給出確切點(diǎn),配合TDS 的擬合中線(xiàn)計(jì)算出坐標(biāo),由監(jiān)控軟件顯示。
當(dāng)有故障發(fā)生時(shí),由于控制器反饋的局限性,有些實(shí)時(shí)具體故障無(wú)法顯示,需要TDS 監(jiān)控界面顯示故障并記錄,且顯示在右下區(qū)域便于在維修時(shí)進(jìn)行故障分析。在軌道吊接收到總控制器發(fā)出的命令后,通過(guò)PLC 控制大車(chē)小車(chē)到達(dá)指定貝位,此時(shí)TDS 開(kāi)始作業(yè),所以在監(jiān)控界面最下方加入各運(yùn)動(dòng)機(jī)構(gòu)的位置信息,便于判斷TDS 的工作狀態(tài)。由于以太網(wǎng)和CAN 雙通信,需要對(duì)通信網(wǎng)絡(luò)進(jìn)行實(shí)時(shí)反饋,便于對(duì)故障點(diǎn)進(jìn)行查找,在監(jiān)控軟件左側(cè)分別進(jìn)行顯示。
為方便調(diào)試標(biāo)定,在監(jiān)控軟件內(nèi)加入模擬指令,通過(guò)控制器和工控機(jī)的信息交流計(jì)算,對(duì)不同的指令設(shè)置給出相應(yīng)數(shù)據(jù)支持。
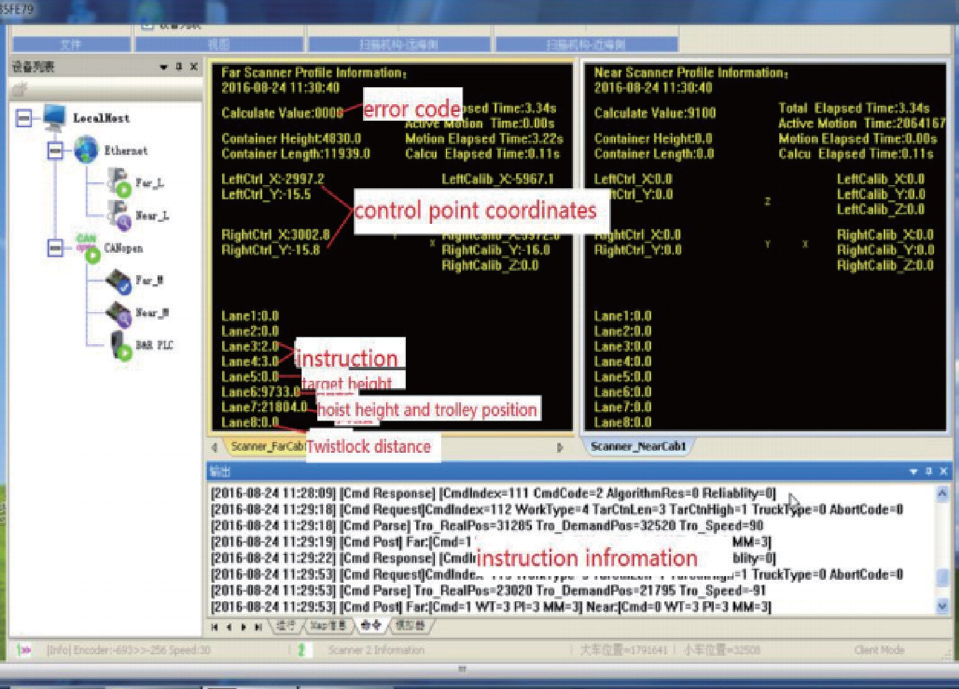
圖2 監(jiān)控軟件
2)激光器污染監(jiān)控
如圖3 所示,TDS 激光器安裝在小車(chē)上架的露天位置,當(dāng)遇到粉塵、大霧、大雪等極端天氣時(shí),會(huì)使其外殼吸附雜物變臟,影響激光器作業(yè)。此時(shí)需要對(duì)激光器的污染程度進(jìn)行實(shí)時(shí)監(jiān)控,便于維保保證設(shè)備正常運(yùn)行。
SOPAS ET 軟件是與TDS 激光器攝像頭相匹配的檢測(cè)軟件,既可對(duì)激光器污染程度進(jìn)行顯示,還可對(duì)不同參數(shù)等進(jìn)行配置。
通過(guò)軟件登錄許可,可對(duì)激光器參數(shù)進(jìn)行修改,需要觀(guān)察污染程度時(shí), 由Parameter的Contaminationmeasurement可觀(guān)察曲面激光器屏幕的5 °、35 °、70°、110°、145°和175°等不同方位的清晰度百分比,進(jìn)而準(zhǔn)確了解激光器污染狀態(tài)。
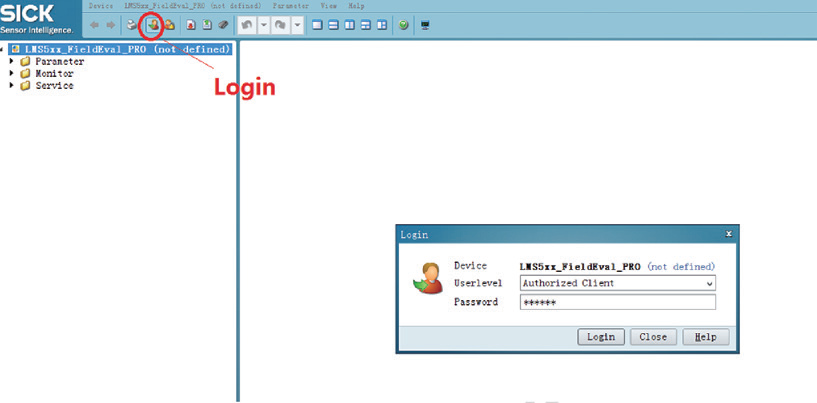
圖3 激光器監(jiān)控軟件
1.3 安裝標(biāo)定
由于TDS 系統(tǒng)工作時(shí)需要較高的準(zhǔn)確度,所以在標(biāo)定時(shí)要保證標(biāo)定環(huán)境的穩(wěn)定,嚴(yán)禁在大風(fēng)大雨大霧的情況下標(biāo)定。由于識(shí)別問(wèn)題,標(biāo)定時(shí)不可選用箱頂為深藍(lán)色或有水覆蓋的箱體,在TDS 系統(tǒng)標(biāo)定前應(yīng)確保各設(shè)備正常且地面平整。
1)TDS 轉(zhuǎn)動(dòng)機(jī)構(gòu)調(diào)平
將40 尺標(biāo)準(zhǔn)集裝箱放到地面貝位標(biāo)志內(nèi),從工控機(jī)對(duì)TDS 基本參數(shù)數(shù)值按規(guī)定修改,打開(kāi)TDS 監(jiān)控軟件,發(fā)送模擬抓箱指令,此時(shí)TDS 正常工作,并計(jì)算出遠(yuǎn)近端抽象坐標(biāo)點(diǎn)LeftCtrl 和RigehtCtrl(見(jiàn)圖4)。
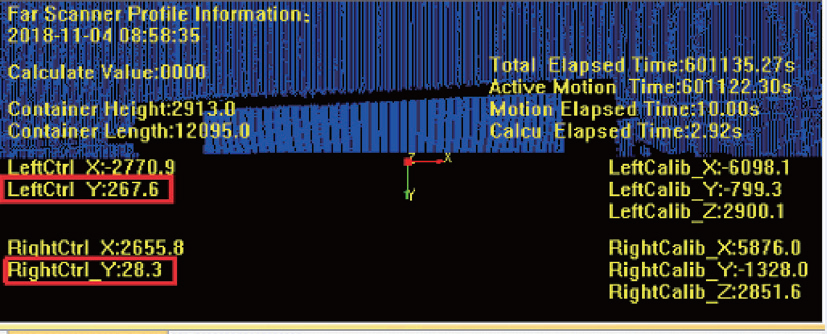
圖4 掃描畫(huà)面
對(duì)比兩坐標(biāo)點(diǎn)數(shù)據(jù),因一側(cè)坐標(biāo)Y 值相差不大,當(dāng)左右兩數(shù)值差大于25 mm 時(shí),須對(duì)轉(zhuǎn)動(dòng)機(jī)構(gòu)進(jìn)行機(jī)械調(diào)整,直到數(shù)值滿(mǎn)足條件為止。
2)馬達(dá)零位以及大車(chē)方向角度修正在轉(zhuǎn)動(dòng)機(jī)構(gòu)調(diào)整完成后,吊具上行至上停止點(diǎn),對(duì)小車(chē)不動(dòng)并記錄此時(shí)位置。發(fā)送模擬指令抓一層箱,記錄此時(shí)TDS 遠(yuǎn)近端LeftCtrl 和RigehtCtrl 坐標(biāo)點(diǎn)(見(jiàn)表1)。
此后與場(chǎng)橋司機(jī)配合手動(dòng)放二、三和四層箱,不需要數(shù)據(jù)記錄。手動(dòng)放第五層箱時(shí),小車(chē)盡量與第一層箱作業(yè)時(shí)位置相近,完成后吊具上升至上停止位。通過(guò)TDS 監(jiān)控軟件發(fā)送第五層抓箱指令,并記錄小車(chē)位置和數(shù)據(jù)點(diǎn)同上。填入表格計(jì)算出馬達(dá)零點(diǎn)以及大車(chē)角度修正值,對(duì)原有參數(shù)進(jìn)行修改完成調(diào)試。
3)設(shè)置馬達(dá)掃描范圍和數(shù)據(jù)采集抓箱、放箱和疊箱因工況不同對(duì)馬達(dá)掃描范圍要求不同,對(duì)應(yīng)的掃描范圍需通過(guò)數(shù)據(jù)庫(kù)數(shù)據(jù)進(jìn)行設(shè)置,分成3D 掃描范圍、小車(chē)掃描范圍和疊箱掃描范圍。遠(yuǎn)近端位置和參數(shù)設(shè)置相匹配,在表格中修改后可正常運(yùn)行。正常運(yùn)行后對(duì)3D 掃描數(shù)據(jù)和小車(chē)移動(dòng)數(shù)據(jù)進(jìn)行采集記錄。
4)TDS 數(shù)據(jù)標(biāo)定和高度匹配補(bǔ)償TDS 標(biāo)定以標(biāo)定程序?yàn)闇?zhǔn),通過(guò)在標(biāo)定程序輸入對(duì)應(yīng)采集數(shù)據(jù),并在多次重復(fù)自動(dòng)生成后,對(duì)吊具姿態(tài)調(diào)整控制不再發(fā)生變化,證明標(biāo)定完成。此時(shí)完成某一列標(biāo)定,對(duì)于其他位置通過(guò)對(duì)吊具最低位置和最高位置姿態(tài)調(diào)整控制點(diǎn),與實(shí)際偏差進(jìn)行比較,自動(dòng)生成不同列的標(biāo)定數(shù)據(jù)。
當(dāng)同一次抓箱時(shí),TDS 計(jì)算高度H 與起升位置高度h 明顯存在偏差時(shí),需對(duì)數(shù)據(jù)進(jìn)行重新配置。當(dāng)H 與h 的差值大于100 mm 時(shí),將初始數(shù)據(jù)Highoffest 賦0 值,數(shù)據(jù)清零,再自動(dòng)抓箱一次,打開(kāi)軟件監(jiān)控界面記錄箱高container Height,找到起升實(shí)際位置Hoistland,通過(guò)兩者相減得到新Highoffest 值,再賦給初始參數(shù)。當(dāng)重啟TDS 監(jiān)控軟件自動(dòng)作業(yè)后H 與h 差值數(shù)據(jù)正常,調(diào)試完畢。
2 應(yīng)用及故障分析
2.1 應(yīng)用功能描述
1)安全保護(hù)
在堆場(chǎng)自動(dòng)化作業(yè)過(guò)程中,因無(wú)人操控而使目標(biāo)檢測(cè)尤為重要,安全位置的目標(biāo)檢測(cè)可避免危險(xiǎn)事故發(fā)生,保證生產(chǎn)安全。自動(dòng)化設(shè)備的關(guān)鍵便是能自行判斷工況環(huán)境并加以處理,其中傳感器系統(tǒng)可完成系統(tǒng)中的信息采集和處理任務(wù),能準(zhǔn)確判斷外部環(huán)境進(jìn)行作業(yè)。目標(biāo)檢測(cè)技術(shù)的3D 轉(zhuǎn)動(dòng)機(jī)構(gòu)就是典型傳感器系統(tǒng),可輔助軌道吊自動(dòng)化系統(tǒng)完成復(fù)雜工況的作業(yè)任務(wù)。TDS 的安全保護(hù)功能主要通過(guò)對(duì)集裝箱箱高和箱子類(lèi)型尺寸檢測(cè)加以實(shí)現(xiàn)。在掃描完成后,將目標(biāo)高度和集裝箱尺寸等信息發(fā)送給軌道吊控制器,根據(jù)控制策略可完成不同任務(wù)動(dòng)作并進(jìn)行風(fēng)險(xiǎn)規(guī)避。當(dāng)目標(biāo)位置高度接近策略要求高度時(shí),會(huì)對(duì)起升機(jī)構(gòu)進(jìn)行限速處理,當(dāng)目標(biāo)箱尺寸發(fā)生變化時(shí),可通知控制器更改吊具尺寸來(lái)完成相應(yīng)作業(yè)任務(wù)。
對(duì)于特殊工況,當(dāng)有人工需求需要手動(dòng)抓放箱時(shí),因個(gè)人習(xí)慣和人眼判斷等因素影響,很難將集裝箱貝位位置放置準(zhǔn)確,此時(shí)將會(huì)出現(xiàn)歪箱或斜箱的現(xiàn)象。當(dāng)轉(zhuǎn)為自動(dòng)作業(yè)后,TDS 會(huì)對(duì)堆場(chǎng)再次進(jìn)行掃描,并規(guī)劃出保護(hù)區(qū)域,當(dāng)歪箱、斜箱不能正常作業(yè)或無(wú)法判斷是否有安全事故隱患時(shí),將會(huì)切換遠(yuǎn)程故障臺(tái)由人工進(jìn)行詳細(xì)判斷,避免了盲目自動(dòng)抓箱造成集裝箱相撞或其他安全事故的發(fā)生(見(jiàn)圖5)。
如圖6 所示,由于軌道吊等定位故障且未報(bào)警時(shí),自動(dòng)軌道吊正常作業(yè),但因定位問(wèn)題或指令錯(cuò)發(fā),造成在吊具運(yùn)行過(guò)程中存在與其他列高層箱相撞的情況。此時(shí)TDS 會(huì)對(duì)周?chē)b箱進(jìn)行掃描,在發(fā)現(xiàn)路徑方向有集裝箱不能正常作業(yè)時(shí),同樣會(huì)切換遠(yuǎn)程故障臺(tái)由人工解決,防止繼續(xù)作業(yè)造成安全事故。
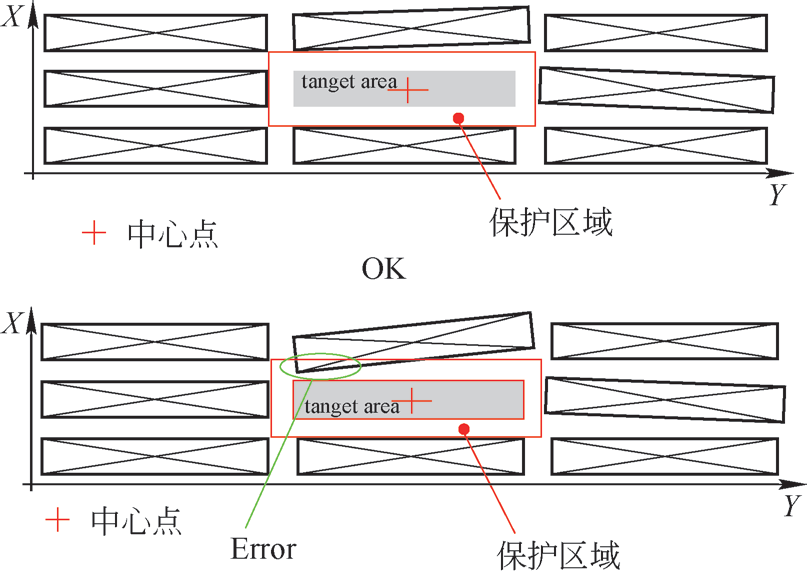
圖5 保護(hù)原理
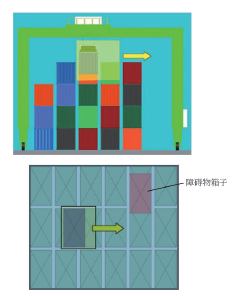
圖6 防撞原理
2)精確定位
如圖7 所示,TDS 系統(tǒng)有精確的定位功能,其通過(guò)轉(zhuǎn)動(dòng)機(jī)構(gòu)的配合,可較全面準(zhǔn)確地對(duì)目標(biāo)區(qū)域進(jìn)行掃描,并對(duì)目標(biāo)進(jìn)行確認(rèn)。主要檢測(cè)對(duì)象有集裝箱位置、集卡車(chē)位置和雙箱間隙等。當(dāng)集裝箱因地面不平或人工作業(yè)等因素造成位置不規(guī)范時(shí),可通過(guò)數(shù)據(jù)處理對(duì)目標(biāo)位置進(jìn)行重新定位。具體定位通過(guò)監(jiān)控軟件進(jìn)行顯示,并由工控機(jī)進(jìn)行數(shù)據(jù)處理與控制器交互。
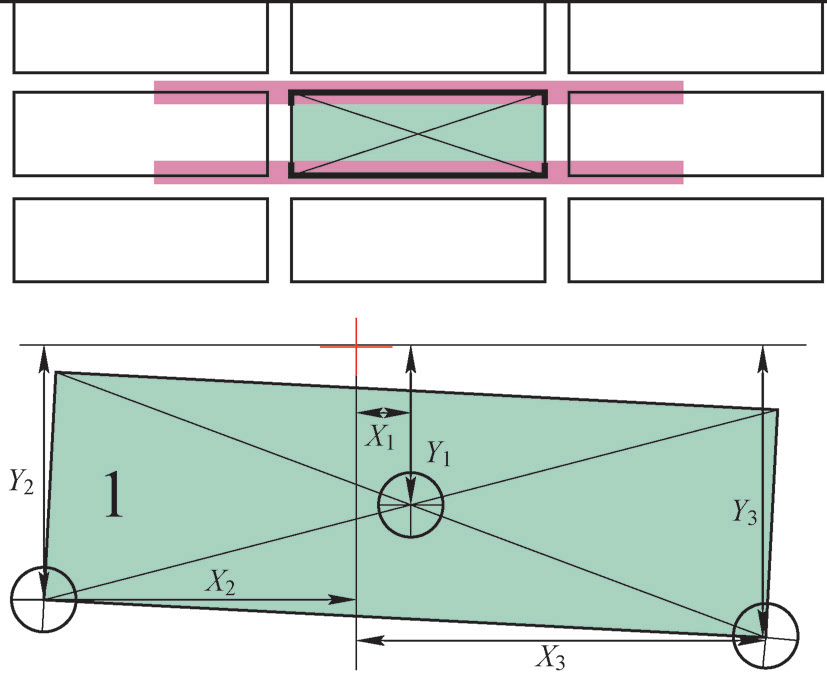
圖7 定位原理
2.2 故障分析處理
1)設(shè)備運(yùn)行狀態(tài)
異常具體現(xiàn)象:TDS 工控機(jī)通信問(wèn)題、激光器和馬達(dá)硬件故障。
影響程度:嚴(yán)重。
解決措施:聯(lián)系現(xiàn)場(chǎng)維修檢查線(xiàn)路問(wèn)題或重啟TDS工控機(jī),檢查激光器的硬件是否受損,馬達(dá)轉(zhuǎn)動(dòng)是否靈敏,如有卡頓情況需更換。
2)算法限制
具體現(xiàn)象:當(dāng)激光器污染較輕時(shí),雖未達(dá)到污染報(bào)警程度,但對(duì)數(shù)據(jù)采集產(chǎn)生一定干擾,導(dǎo)致算法處理受限;當(dāng)集裝箱為黑色或深藍(lán)色,受條件限制,掃描數(shù)據(jù)存在誤差。
影響程度:嚴(yán)重。
解決措施:檢查激光器污染情況,須擦拭時(shí)聯(lián)系現(xiàn)場(chǎng)擦拭。限制顏色偏深集裝箱進(jìn)入堆場(chǎng),當(dāng)因太臟或外界環(huán)境因素導(dǎo)致算法錯(cuò)誤時(shí),人工抓箱。
3)等待超時(shí)
具體現(xiàn)象:TDS系統(tǒng)工控機(jī)與控制器指令通信故障,等待超時(shí)。
影響程度:一般。
解決措施:檢查T(mén)DS 系統(tǒng)監(jiān)控軟件,異常時(shí)導(dǎo)致與控制器指令交互問(wèn)題,檢查工控機(jī)與控制器交互通道。
4)激光器攝像頭臟
具體現(xiàn)象:當(dāng)大霧、大雨、大雪和大風(fēng)等天氣時(shí),激光器外罩極易附著空氣中漂浮顆粒,會(huì)導(dǎo)致激光器模糊不能作業(yè)。在使用一定周期后,激光器變臟需處理。
影響程度:嚴(yán)重。
解決措施:參照SOPAS 激光器監(jiān)控軟件對(duì)受污染情況分地址查看,當(dāng)百分比小于80% 時(shí),其對(duì)應(yīng)角度需要擦拭。定期對(duì)TDS 激光器外殼進(jìn)行有規(guī)律擦拭。
5)周?chē)姓系K物
具體現(xiàn)象:在堆場(chǎng)作業(yè)時(shí),TDS 通過(guò)檢測(cè)發(fā)現(xiàn)周?chē)嚯x小于25 cm,在安全位置內(nèi)。
影響程度:一般。
解決措施:臨時(shí)手動(dòng)進(jìn)行抓放。導(dǎo)致的原因可能是人工放箱或設(shè)備位置偏差,需對(duì)人工作業(yè)時(shí)進(jìn)行嚴(yán)格要求,檢查小車(chē)位置是否準(zhǔn)確,與大車(chē)起升位置是否匹配,如有問(wèn)題需對(duì)準(zhǔn)貝位重新標(biāo)定。
6)指令不匹配
具體現(xiàn)象:20 尺、40 尺箱子與吊具對(duì)應(yīng)不匹配。
抓放箱層高與實(shí)際不匹配。
影響程度:一般。
解決措施:存在吊具卡頓導(dǎo)致無(wú)法切換尺寸或箱子信息與指令任務(wù)信息不符。堆場(chǎng)地圖信息不匹配需重新更新地圖。
7)TDS 與控制器通信無(wú)心跳
具體現(xiàn)象:具體體現(xiàn)在監(jiān)控軟件中CAN 和以太網(wǎng)通訊故障。
影響程度:嚴(yán)重。
解決措施:需對(duì)光轉(zhuǎn)和Hub 進(jìn)行檢查,對(duì)各通信端口接線(xiàn)進(jìn)行插拔重連,重啟工控機(jī)。
3 總結(jié)
目標(biāo)檢測(cè)系統(tǒng)涉及激光器的信息采集和處理,通過(guò)對(duì)目標(biāo)信息判斷結(jié)合軌道吊完成作業(yè)任務(wù)。隨著智能化碼頭的發(fā)展,目標(biāo)檢測(cè)技術(shù)在不斷發(fā)展成熟。3D 激光識(shí)別技術(shù),通過(guò)對(duì)周?chē)矬w的立體掃描進(jìn)行環(huán)境識(shí)別,其優(yōu)點(diǎn)是可實(shí)現(xiàn)實(shí)時(shí)監(jiān)控,檢測(cè)距離精確,判斷位置準(zhǔn)確,受工作環(huán)境影響小。對(duì)于目標(biāo)物體以外的無(wú)關(guān)物體也可進(jìn)行掃描,可能存在因周?chē)s物影響而導(dǎo)致檢測(cè)不準(zhǔn)情況發(fā)生。同時(shí),由于對(duì)顏色的敏感性問(wèn)題,對(duì)深色集裝箱信息采集困難。過(guò)于標(biāo)準(zhǔn)化的設(shè)定使其難以靈活處理復(fù)雜工況。這些都是此類(lèi)目標(biāo)檢測(cè)系統(tǒng)優(yōu)化的方向,通過(guò)不斷實(shí)踐和完善,目標(biāo)檢測(cè)系統(tǒng)對(duì)工作環(huán)境適應(yīng)能力會(huì)越來(lái)越強(qiáng),使其在港口集裝箱作業(yè)中成為關(guān)鍵核心。
參考文獻(xiàn)
[1] 羅勛杰。 全自動(dòng)化集裝箱碼頭關(guān)鍵裝備技術(shù)與發(fā)展[J]。港口裝卸,2019(1):1-5.
[2] 張炳漢。 建設(shè)第三代港口實(shí)現(xiàn)跳躍式發(fā)展[J]。 中國(guó)港口,2004(1):10-12.
[3] 匡家喜,柴佳祺。 基于圖像分析的自動(dòng)化碼頭集裝箱邊緣檢測(cè)與定位問(wèn)題研究[J]。 港口裝卸,2019(5):51-56.
[4] Subramanian R,Germain H,Drake S.Integrating a Vision System with a Coordinate Measuring Machine to Automate the Datum Alignment Process[C].Proc.Int.Des.Eng.Techn.Conf.Compu.Inf.Eng.Conf.Long Beach,CA,United states.American Society of Mechanical Engineers,2005:655-661.
[5] Ballard D H.Generalizing the hough transform to detectarbitrary shapes[J].Pattern Recognition,1981,13(2) :111-122.
編輯:lyn
-
控制器
+關(guān)注
關(guān)注
112文章
16384瀏覽量
178334 -
激光器
+關(guān)注
關(guān)注
17文章
2520瀏覽量
60434 -
目標(biāo)檢測(cè)
+關(guān)注
關(guān)注
0文章
209瀏覽量
15621
原文標(biāo)題:目標(biāo)檢測(cè)系統(tǒng)在自動(dòng)化碼頭中的應(yīng)用
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
AI模型部署邊緣設(shè)備的奇妙之旅:目標(biāo)檢測(cè)模型
手把手教你如何自制目標(biāo)檢測(cè)框架

圖像分割與目標(biāo)檢測(cè)的區(qū)別是什么
目標(biāo)檢測(cè)與圖像識(shí)別的區(qū)別在哪
目標(biāo)檢測(cè)與識(shí)別技術(shù)有哪些
目標(biāo)檢測(cè)與識(shí)別技術(shù)的關(guān)系是什么
目標(biāo)檢測(cè)識(shí)別主要應(yīng)用于哪些方面
慧視小目標(biāo)識(shí)別算法 解決目標(biāo)檢測(cè)中的老大難問(wèn)題

多目標(biāo)智能識(shí)別系統(tǒng)
基于深度學(xué)習(xí)的小目標(biāo)檢測(cè)
基于GIS的SAR多目標(biāo)智能識(shí)別系統(tǒng)
AI視覺(jué)檢測(cè)系統(tǒng)在多方面實(shí)現(xiàn)技術(shù)創(chuàng)新
深度學(xué)習(xí)檢測(cè)小目標(biāo)常用方法

百度開(kāi)源DETRs在實(shí)時(shí)目標(biāo)檢測(cè)中勝過(guò)YOLOs

發(fā)射機(jī)信號(hào)檢測(cè)和故障分析設(shè)備介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論