 基于nRF905和K9F1208U0A芯片實現狀態監測與故障診斷系統的設計
基于nRF905和K9F1208U0A芯片實現狀態監測與故障診斷系統的設計
作者:姜虎強;王麗紅;董良新
狀態監測與故障診斷技術是現代工業技術發展的產物,已發展到了以專家系統、神經網絡和模糊分析等理論為基礎,以網絡技術為依托,以知識處理為核心的先進智能化技術。Linux和RFID已成為現代工業技術熱點,隨著嵌入式技術的蓬勃發展,嵌入式系統憑借其性價比高、穩定性好、體積小、功耗低等眾多優點已經深入到國防、網絡通信、工業控制、數字多媒體相關的消費類領域。本文所介紹的面向鐵路的手持式智能化故障診斷儀,涉及了Linux、RFID、嵌入式數據采集和無線傳輸功能及嵌入式系統的新技術。該套系統正是以知識處理為核心的嵌入式在線監測故障診斷儀器,具有功能強大、簡單易用、便于攜帶等優點。原始數據可通過USB接口取出,進一步進行事后處理。本系統還可通過CDMA模塊連接無線網絡,將處理完畢的數據實時地發送到客戶端,以實現特定信息查詢和告警功能。
1 系統的組成和結構
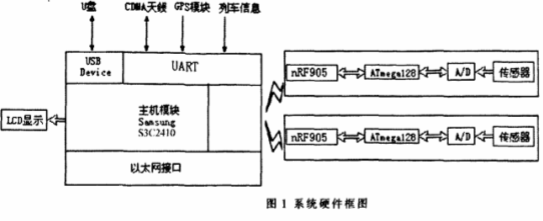
該面向鐵路的手持式智能化故障診斷儀,是一套基于電池供電的智能化儀器。測試系統主要由測試頭、主測試設備和遠程監控站3級測試層組成。前端測試頭主要由AVR采集MCU、傳感器和智能RF芯片構成;下位機是基于ATmega128單片機的數據采集系統,承擔多路現場快變及緩變信號的采集,主要完成任務采集、接收來自主采集設備的指令并執行主設備的任務調度。主測試設備主要由內嵌Linux操作系統的ARM9處理器、智能RF芯片、網絡和串行通信接口、存儲設備和顯示設備構成。主測試設備主要完成各無線采集點的任務分配、數據收集分析,可同時監測和管理若干個連接的無線網絡范圍內的傳感器測試頭,并可通過無線數據傳輸模塊或通過Internet傳向遠程監控站并接受遠程控制站的任務調度。
遠程監控站主要由服務器、監測數據庫和外圍設備構成,分為數據采集(上位機)和數據處理(下位機)兩大部分,承擔實時數據的處理,也可以通過USB口或者以太網下載到PC上,進行進一步深入的故障趨勢分析。本系統對整個現場監測的任務進行合理地分解:將模擬信號的采集、A/D轉換以及簡單的數據處理部分放在下位機實現,以控制系統的硬件規模及耗電量。將數據的進一步處理、實現現場實時分析的構件、歷史數據重現及精簡的專家系統放在上位機上實現,本文主要介紹無線數據傳輸的研究設計。系統框架如圖1所示。
2 硬件系統設計
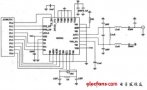
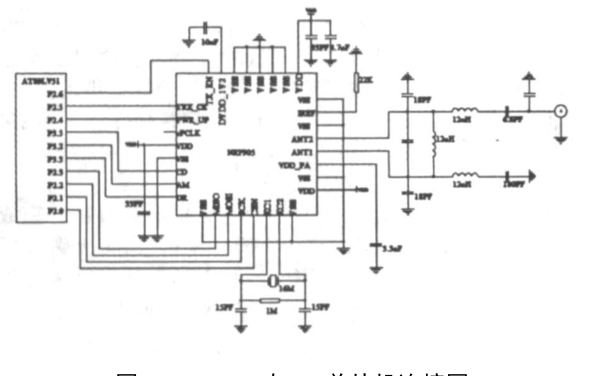
2.1 智能nRF905無線收發芯片
增加安全可靠、穩定的無線模塊功能,是傳統PDA設備的技術趨勢。該設備采用Nordic公司的單片無線收發芯片nRF905。該芯片工作在433/869/915 MHz的ISM頻段,由1個完全集成的頻率調制器,1個帶解調器的接收器、1個功率放大器、1個晶體振蕩器和1個調節器組成,可以很容易地通過SPI接口進行編程配置。電流消耗很低,可以很容易地進入Powerdown模式實現節電。nRF905采用VLSI ShockBurst技術,使得nRF905能夠提供高速的數據傳輸,將與RF協議有關的高速信號處理放到芯片內部。在ShockBurst TX模式中,nRF905自動產生前導碼和CRC校驗碼,數據準備就緒DR信號通知主控制其數據傳輸已經完成。該芯片可與測試設備ARM和AVR的MCU通過簡單的串行接口連接,使用方便。
2.2 ARM處理器模塊
構建可移植嵌入式Linux的ARM9系統,嵌入式Linux是目前廣泛應用的一種嵌入式操作系統,ARM處理器模塊由Flash、SDRAM和S3C2410共同構建。本系統選用Samsung公司的K9F1208U0A構建8位Flash存儲器系統。
K9F1208U0A單片容量為64 MB:選用2片單片容量為32 MB、數據寬度為16位的HY57V561620CT并聯構建32位SDRAM存儲器系統,共64 MB的SDRAM空間可以滿足嵌入式操作系統和各種復雜算法的運行要求。ARM處理器對各模塊的控制則通過底層驅動控制協處理器產生各種控制信號實現。
2.3 傳感器模塊
傳感器模塊可以根據所需采集的數據來選擇。本系統是在CAN總線有線數據傳輸的基礎上開發的,CAN總線通信電路由微處理器S3C2410、控制器MCP2515、驅動器TJA1050、光耦6N137和電源隔離模塊組成,CAN通信主要用于機車惡劣環境下的數據采集。該系統的無線傳輸功能主要運用于火車機車車體振動測量,也可運用于機車的運行監測。所以采用3個使用ADXL105高精度單軸加速度傳感器芯片制作的加速度測量模塊。測量模塊分別安置于車體底部的垂直方向和水平方向,用于測量車體在X、Y、Z方向上的加速度。測量數據以差分信號的形式輸入到精密放大器中,經比較放大后直接送到A/D模塊中。
2.4 外部通信模塊
設備外部通信模塊由2部分組成:485通信模塊和CDMA模塊。485通信接口采用MAX1490芯片。這是一款完全隔離的485數據接口芯片,單工工作方式,傳輸波特率最大可達2.5 Mb/s。其輸出引腳直接與ARM處理器的串口2(UART2)相連,ARM處理器通過串口2讀取時間和坐標等相關數據的廣播信息,串口0(UART0)與AnyData DTGS800 CDMA模塊相連,監測數據經預處理后通過CDMA模塊發送到地面服務器。
2.5 系統關鍵硬件接口設計
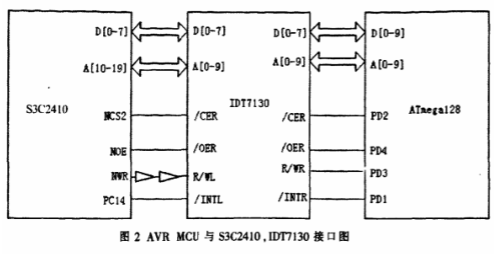
系統硬件主要接口包括AVR與nRF905的接口、AVR與ARM9的接口以及ARM9的外圍接口等。本文主要介紹AVR與nRF905和ARM9的接口。AVR MCU通過nRF905接口收發數據,然后將收到的數據寫入雙口RAM等待讀取數據,另外ARM9將要發送的數據寫入雙口RAM后給AVR MCU發送中斷信號,AVR MCU再從雙口RAM中讀取數據,根據指令將其發送至相應的采樣傳感器測試頭。但由于ARM與AVR之間的通信速率不匹配,2個CPU的數據交換通過一片雙口RAM完成。因此應用了異步高速雙口RAM IDT7130,很好地解決了異步串口通信的瓶頸問題,雙口RAM對于存儲區的分配,分成命令區、狀態區、接收數據區、發送數據區和中斷區5大區。接收數據區和發送數據區的細分,可以根據串口數量、報文長度的實際需要進行再分配,主CPU和從CPU的握手協議可以通過命令區和狀態區的設計來完成。主要接口如圖2所示。
3 軟件系統設計
3.1 軟件系統設計
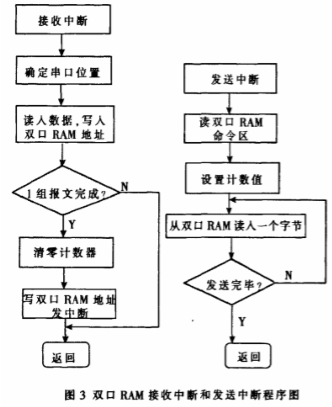
系統以主測試設備為核心,采集、收集多個測試傳感器采集的信息,并將測試數據收集保存,可以通過網絡實時地傳遞到系統的監測中心進行分析和處理。本設計采用的Linux內核是在ARM-Linux的基礎上,編寫了OLED顯示模塊、USB設備的設備驅動程序。軟件設計主要包括ARM-Linux在微處理器S3C2410上的移植,相關驅動程序設計、系統任務級設計等。開發系統采用PC工作站和主測試設備的嵌入式主板構成的交叉編譯環境,本系統使用Linux2.6的內核,內核的編譯通過Makefile文件的指示進行,通過修改Makefile來組織內核各模塊,并記錄模塊間的相互聯系和依賴關系,修改config、setup等相關配置文件完成內核的編譯,生成zlmage、vmLinux、System.map、config等文件。雙口通信的程序如圖3所示。
3.2 網絡通信程序設計
嵌入式無線局域網設備可以用于有線網絡無法延伸或難以安裝、又可靈活移動和臨時性使用等要求的場合。在本系統中主要采用Linux下的Socket通信方式,使用TCP/IP網絡協議棧,采用面向有連接Stream套接字。
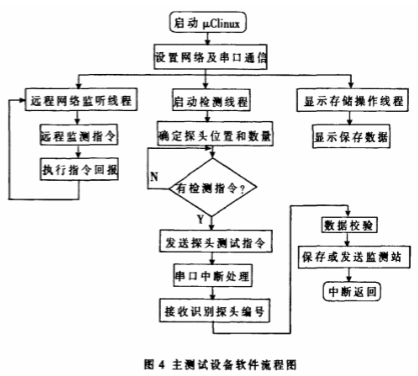
主測試設備運行過程中,接收來自網絡的遠程指令,并且為了方便遠程測量和控制,每個主測試設備被分配固定的IP地址和端口,遠程測試站可進行有選擇性的查詢式測量,每個主測試設備在通信開始前使用socket( )建立一個通信端點,再使用bind( )函數把一個地址綁定到這個端點上,然后使用listen( )函數偵聽是否有來自遠程的連接請求,如果有,則使用accept( )處理,并按照指令執行測量任務或傳送測量數據。如圖4所示。
雖然現場顯示和無線傳輸2種方式已經提供了大量的數據和信息。但是都受到了地域和空間的限制。因此,為了滿足相對惡劣的地理環境和移動設備的采集需求,系統后期可通過加入GSM短消息傳送數據的無線方式。GSM網絡經過多年的發展完善,現在已經非常成熟,盲區少、信號穩定、自動漫游,并且通信距離不受周圍環境影響。
本文的創新點在于開發了一種基于嵌入式系統的機車狀態實時檢測系統,該系統實現了機車上信號量的采集和信號的存儲、大容量的數據存儲、穩定可靠的CAN總線通訊和遠程無線通信,各個模塊在Linux實時操作系統的調度下協調工作,車載顯示和語音報警效果良好,并能夠在機車出現故障時提醒司機故障出現的位置和解決故障的方法。該系統通過在嵌入式Linux環境下的網絡通信測試實驗,證實具有較好的響應能力和數據吞吐能力,本系統設計在非接觸式測量領域有一定的應用價值和指導意義,經在機車檢測方面的多次聯機調試,系統工作穩定、可靠,在工業控制領域具有廣泛的應用前景。
責任編輯:gt
-
芯片
+關注
關注
456文章
50967瀏覽量
424874 -
嵌入式
+關注
關注
5087文章
19148瀏覽量
306194 -
無線
+關注
關注
31文章
5463瀏覽量
173510
發布評論請先 登錄
相關推薦
印制板故障診斷系統的設計
基于VXI儀器的電路板故障診斷系統
基于LabVIEW和MATLAB混合編程的齒輪箱故障診斷系統設計
K9F1208U0M-YCB0, K9F1208U0M-YI
k9f1208u0m pdf,k9f1208u0m data
NRF905無線收發芯片原理及設計實現
k9f1208完整手冊 k9f1208數據表Datasheet資料下載

NRF905無線收發芯片原理及設計實現





 工商網監
工商網監
評論