 基于Linux平臺和嵌入式控制計算機實現排爆機器人控制系統的設計
基于Linux平臺和嵌入式控制計算機實現排爆機器人控制系統的設計
作者:王春寶;蔣梁中;林焯華;李朝清
排爆機器人屬于搬運機器人的一種類型,很多搬運機器人是模仿人類的動作,用來幫助或部分代替人來進行繁重、危險、重復等工作。排爆機器人模仿人類的行走、抓取物體的動作,可以被用來排除現場的爆炸物。排爆機器人機械部分包含行走小車和機械手臂。
1 排爆機器人控制系統結構
排爆機器人控制系統不再采用原來機器人所采用的PLC控制方式,而是基于嵌入式工控機的基礎上,采用基于Linux平臺的開放式構件庫,運算速度極快,可以達到微秒級。排爆機器人控制系統由三部分組成,即傳感器部分、機器人本體、操作控制臺組成。傳感器部分包含寬接入、多信息融合器。寬接入、多信息融合基于ARM9系統,由12位精度以上A/D、32路I/O、RS232通訊接口組成,能融合多種傳感器信號;機器人本體包含嵌入式控制計算機和各關節伺服電機,能驅動各軸(帶補償),分配各軸運動,處理和控制各種狀態量;操作控制臺部分包含主控PC機、指令解碼器、圖像解碼器、無線接收發射器等。CCD攝像機和超聲波傳感器所獲得的圖像信息、障礙物信息,經無線傳輸至主控PC機。主控PC機使用圖像識別和分析技術獲得對象物體的形狀和位置信息,同時將目標物、障礙物等三維圖像信息顯示在計算機屏幕上。在人工指明目標物后,主控PC機經人工智能(模式識別、路徑規劃、軌跡避碰等)計算;將控制指令通過無線傳輸給機器人本體嵌入式控制計算機,自動控制機器人運動。基本結構如圖1所示:
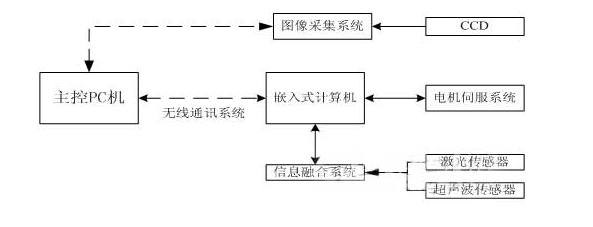
圖1排爆機器人控制系統基本結構
2 小車的行走控制
人工通過控制桿(或按鈕),在小車引導圖像(可視信號)的指示下,完成前進、后退、左轉、右轉和原地旋轉的功能直至達到機械手的手爪能抓取可疑爆炸物的位置為止。機器人的平衡是利用整機的動力學算法求得,將求得多種數據去控制機器人手臂的空間姿態從而達到整機平衡而不至于倒覆。例如當小車在斜坡作上升運動時,機器人手臂往前靠以保持整機的平衡。小車在運動過程中需要避開可能遇到的障礙物。通過環境傳感器如CCD攝像、超聲波傳感器等取得障礙物大小及環境信息,實現小車避障,即所謂的路徑規劃(如圖2所示)
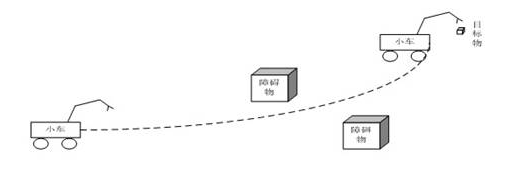
圖2 排爆機器人路徑規劃示意圖
3 機械手的運動控制
機械手的運動控制(如圖3)是多級控制系統:位于最上層的AI級是人工智能層。它是利用CCD攝像機和超聲波等傳感器獲得障礙物輪廓與距離以避開障礙物實現避碰,這就是“軌跡規劃”(如圖4)。
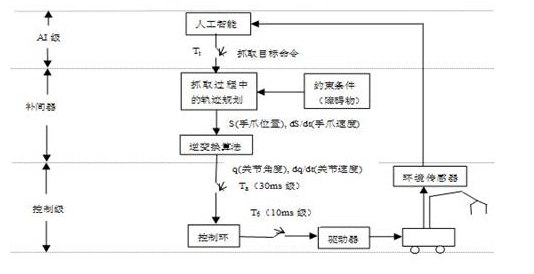
圖3 機械手多級運動控制系統
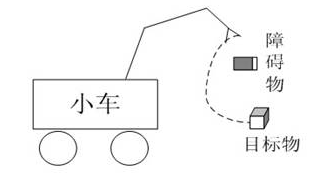
圖4 機械手軌跡規劃示意圖
位于中間層的控制是機械手抓取運動控制中最關鍵的部分。它實際上是一個補間器。機械手的運動控制可分為姿態控制與手位置控制。腰、大臂、小臂、手爪的控制,是由主控計算機通過機械手運動學位移問題進行反向運動求解,得出腰、大臂、小臂、手爪的位置,然后給出各關節位置指令傳至上述關節的嵌入式系統控制計算機,完成帶有速度反饋環的位置控制。四個關節的運動速度通過機械手的軌跡規劃來決定,從而避免機械手的蛇形運動。由于有觸覺傳感器,手爪可以自動控制,也可以是在圖像信號的指引下作精細“柔軟控制”。抓取可疑爆炸物時,控制手爪夾持力約大于可疑爆炸物脫落重力,不至用力過大而夾壞可疑爆炸物,從而完成專家指定的動作。
位于最下層是控制級位置控制器與速度調節器均采用成熟的PID(包括P、PI、PD)控制。當PID控制其選擇合適的參數時,具有一定魯棒性,簡單、實用。當PID無法實現有效控制時,可改進之或結合其它方法,如前饋控制。運動控制包括機械手各個關節運動控制和行走運動,初步統計控制回路有13路,如圖 5所示。
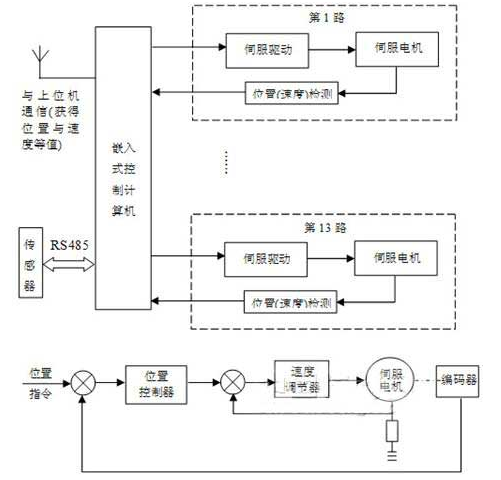
圖5 自動控制原理圖
嵌入式控制計算機根據上位計算機傳來的位置與速度信號,對各個伺服機構進行位置與速度設定,按控制規律(如PID)對伺服電機進行控制,使實際位置按預計的速度跟蹤或運動到目標位置。
機器人的手眼協調系統:機器人的手眼協調系統是本系統最大亮點之一。由于于補間器算法需要知道目標物與機器人基坐標(一般是機械人的腰關節底座),相對空間座標才能求解。而本系統目標物是在未知環境里。這相對坐標必須由于手眼協調系統來求解。排爆機器人機械手上裝有雙目系統,利用雙目系統和目標物可構成“ 測矩三角型”,原理示意如圖6。測矩三角型求得距離誤差較大,需要利用激光測距的“光斑”輔助測矩,從而獲得坐標物的空間座標。隨著機器人的雙目接近目標物,目標物與基坐標的相對坐標精度提高,經過數次雙目逼近目標物之后,最終實現機械手準確地抓到目標物。
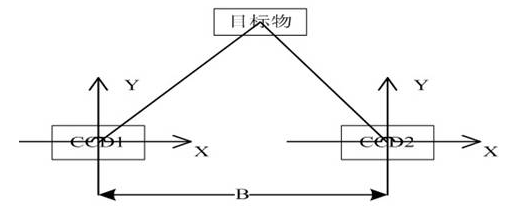
圖6 測矩三角型原理圖
當機器人自動抓取失敗之后,操縱者可利用手動系統完成抓取。這是任何一個產品在自動失靈之后必須具備的功能。機器人的雙目獲得的圖像信息,通過處理,在控制臺的顯示器上形成監控圖像,以便操控者以鼠標點取多個物體中的可疑物體。
4 控制系統的通信系統
機器人與現場操縱控制臺主控計算機之間采用串口無線通訊。現場主控計算機與遠程監控中心采用CDMA通訊技術進行無線圖像傳輸。通訊系統中任何一點均可觀察到現場目標物和機器人的狀態。
在實驗室和工業應用中,受信道成本限制,串口常常作為計算機與外部串行設備之間的首選數據傳輸通道,而且由于串行通信方便易行,許多設備和計算機都可以通過串口對外設進行控制、檢測,串口通信日益成為計算機和外設進行通信、獲取由外設采集到的監測數據的一個非常重要的手段。為了解決有線通信的局限性,考慮到機器人自規劃、自組織、自適應能力強、所處環境不確定的特點,無線通信是實現機器人與計算機之間通信的理想方式。因此采用無線數傳模塊進行數據信號傳輸是排爆機器人中重要的一環。無線數傳模塊體積小、使用方便,能遠距離地操控機器人從而有效保護操作人員安全。
所謂CDMA(碼分多址技術)是一種以擴展通訊系統為基礎的載波調制與多址連接技術。CDMA具有許多的優點,其中一部分是擴展系統所固有的,另一部分是由軟件切換和功率控制所帶來的,CDMA通訊網絡是由擴頻網、多址接入、蜂窩網絡和頻率再用等技術結合而成,含有頻域、時域和碼域三維信號處理的一種協作,因此它具有抗干擾性能好、抗多徑衰落、保密安全性能高.
5 結論及展望
本文的創新點在于此排爆機器人控制系統是一個開放式控制系統,該控制系統成功的結合了雙目視覺測距、智能控制算法,實現了機器人的智能化和網絡化功能。該設計的適用性很廣,只要依據需求進行適當修改即可設計出適用其他功能機器人的控制系統,具有較高的參考價值。
通過該系統的研究與開發,必將提高排爆機器人的自動控制水平,提高排爆機器人的操作性與可靠性,對于保障公共安全、提高排爆效率有很大幫助。
責任編輯:gt
-
嵌入式
+關注
關注
5087文章
19153瀏覽量
306401 -
控制系統
+關注
關注
41文章
6642瀏覽量
110718 -
機器人
+關注
關注
211文章
28557瀏覽量
207684 -
Linux
+關注
關注
87文章
11326瀏覽量
209961 -
計算機
+關注
關注
19文章
7523瀏覽量
88312
發布評論請先 登錄
相關推薦
嵌入式系統在機器人中的應用
如何利用ARM研究嵌入式服務機器人控制器?
嵌入式服務機器人控制系統能實現什么功能?
RIO嵌入式控制平臺怎么助力機器人應用?
通過多軸工業機器人來聊聊機器人控制系統以及控制器的實現

嵌入式計算機在機器人直流伺服控制中的應用

基于排爆機器人PBJ-1的嵌入式控制系統的設計與解決方案
基于RTX51操作系統實現地面移動機器人控制系統的設計





 工商網監
工商網監
評論