 探究多Agent的傳感器管理系統研究與設計
探究多Agent的傳感器管理系統研究與設計
本文提出了一種傳感器管理系統框架,給出了基于多Agent的解決方案。該結構通過多個Agent間的相互協商來實現傳感器任務的分配,較好地克服了在融合中心存在的缺陷。并在此基礎上著重探討各Agent之間的協調合作問題,實現了基于KQML語言的各Agent之間的協調機制。
1 引 言
多傳感器系統能從不同的角度和視野獲取其觀測環境更多的全局信息,在軍事和民用領域正受到越來越廣泛的重視。為適應現代戰場變化,獲得最佳的作戰效果,許多研究人員開始把注意力放在對傳感器資源進行自動或半自動管理的研究上,充分發揮各個傳感器的效能。
與此同時,隨著指揮自動化建設的不斷前進和更新,越來越多的遺留系統擺在研究人員的面前,如何合理利用這些遺留系統也是科研人員需要解決的一個問題。一個方案就是包裝遺留部件,為他們提供“Agent層次”的功能,使得它們可以和其它的軟件部件進行通信和合作。
2 傳感器管理現狀
傳感器管理的核心問題就是依據一定的最優準則,確定目標選擇何種傳感器以及該傳感器的工作方式及參數。傳感器管理系統(SMGS)的任務就是利用有限的傳感器資源,滿足對多個目標和掃描空間的要求,以得到各具體特性的最優度量值(檢測概率,截獲概率,傳感器自身的發射能力,航跡精度或丟失概率等),以最優準則對傳感器資源進行合理分配,選擇傳感器的工作方式和工作參數。目前的傳感器管理的結構則分為集中式和分布式。
2.1集中式管理結構
在集中式管理結構中,由融合中心向所有的傳感器發送其需要執行的任務和完成該任務的參數集或運行模式。其缺點是融合中心難以對各個傳感器的負載情況做出實時的*估,在多任務時會造成負載不均衡,甚至會造成個別傳感器嚴重過載而無法完成任務,另外,當傳感器數目增多時,融合中心的計算量會急劇上升,通訊量也會大大增加。
2.2分布式管理結構
在分布式管理結構中,將管理功能分布在系統的不同位置或不同傳感器中。其不足是信息冗余會帶來嚴重問題,此外,如果沒有一套公共的通訊設施,網絡中各節點之間的數據交換只能嚴格按端到端的方式進行,發送端與接收端之間的延時會產生網絡中不同部件的全局狀態出現瞬間的不一致,從而導致系統整體性能的下降。任務沖突和競爭使任務協調變得更加復雜。
3 基于多Agent的傳感器管理系統
Agent是來自于分布式人工智能的一個概念模型,通常是指具有目標、行為和知識,能在不確定性環境中,根據自身能力、狀態、資源、相關知識以及外部環境信息,通過規劃、推理和決策實現問題求解,并進行相應的活動,自主地完成特定任務并達到某一目標的實體。
多Agent系統(MAS)是一組為實現某一全局目標,通過通信網絡或計算機網絡相互連接起來的系統。其中的各Agent必須相互協商、協調和協作才能完成共同的任務,以實現全局目標。MAS以其適應環境的動態自組織能力和開放式的基礎結構而在許多領域受到重視。
3.1 系統構架及特點

⑴決策過程分布在網絡上的各節點中,這種策略允許發揮各傳感器節點自身的管理潛能(局部管理器對其自身的傳感器任務進行決策);
⑵全局系統任務管理器僅需對所屬傳感器提出任務要求,然后對系統任務的完成情況(性能指標)進行監控,不需對傳感器進行具體的管理;特別值得強調的是,由于傳感器Agent的設置,使傳感器具有高度的自主性及與設備無關性(傳感器與融合節點之間以及傳感器之間的信息交換可通過基于標準化的請求/響應查詢語言及情報數據鏈實現),這為傳感器的機動組網創造了有利條件;
⑶系統中的每個節點對應于一個物理實體或決策實體,它們之間通過消息進行協調,系統容易構造;
⑷采用基于多Agent的系統,決策者在模型系統上所作的決策能夠很快在實際運行中實現,易于實現;
⑸一般的模擬方法只能*估事先設定好的決策方案的效果,而不能建議產生新的方案,即只能回答“what-if”的問題,而不能回答“what’s best”,多Agent系統為回答“what’s best”問題提供了可能性。
3.2 多Agent的SMGS模型中各Agent的運行機制
⑴融合Agent:為目標、傳感器配對提供目標狀態、屬性信息。對各傳感器發送來的所有相關信息進行數據融合;確定在下一個傳感器管理周期各傳感器代理需完成的系統任務及其全局性能指標;對系統任務的性能指標進行監控,以便確認所要求的性能指標是否達到。
⑵傳感器Agent:獲取目標和傳感器數據;對經協商后分配的傳感器任務進行管理;對與其他網絡節點的數據通訊進行控制。
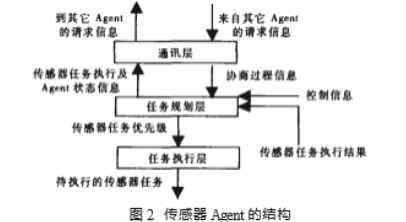
任務執行層的功能取決于傳感器的類型及其完成傳感器任務的能力。
任務規劃層負責確定在下一個管理周期傳感器需完成的任務集,并能對融合中心或其他代理發送來的信息以及操作員提供的信息進行處理獲取環境態勢知識,在此基礎上確定各任務所對應的優先級。
Agent內部規劃層和執行層之間的信息傳送由通訊層負責,該層同時也支持分布式決策中的協商過程,它接收來自其它代理的執行請求、通知或結果信息。協商過程要求能獲知傳感器完成某項任務的能力,通訊層通過規劃層可了解代理完成任務的現狀,一旦由其它代理建議的任務被接受,通訊層就會把經協商確定的傳感器級性能指標下傳到其它層。
如果某項任務無法執行,通訊層將要求的傳感器性能指標與規劃層中的信息進行比較,確定應該由其它Agent執行的一組行為,或者將結果通知給其它Agent,只有那些能被Agent完成的任務才傳送到規劃層。
⑶方案生成Agent:根據預先設置的各傳感器“特長”生成“傳感器”或“傳感器組”與任務的可選配對方案,給當前監測空間出現的某特定目標,配對一個特定傳感器或傳感器組合對其進行進一步檢測,以提供該目標的信息。
⑷方案優化Agent:按照任務需求優選上述方案,形成目標優先級排序。
⑸傳感器控制Agent:是一個轉換模塊,負責把傳感器分配方案轉換為傳感器可執行的命令,同時還完成傳感器的模式選擇、參數選擇等具體操作。
⑹任務規劃Agent:負責具體的傳感器任務分配。
依據以上幾方面提供的依據,形成傳感器管理方案,直接對傳感器配置進行調節。因此,基于Agent的傳感器管理系統對形成數據融合系統的閉環控制模式起著反饋調節作用,增加了系統的魯棒性。
4 多Agent間的協調機制
SMGS強調各個實體間的協同工作,因此是否能夠協調地完成預定任務,是多系統應用于的關鍵問題之一。Agent之間的協調機制可以用多種方法實現,通訊是各獲取信息以進行協商與協調必不可少的手段。我們研究重點是基KQML(Knowledge Query and Manipulation Language)的Agent通訊與協調機制在SMGS系統中的應用。
4.1 KQML語言
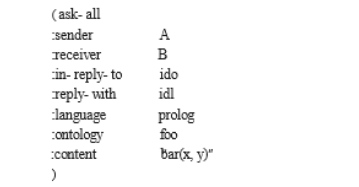
對于Agent中的任何一種協作,方法和語言是不可或缺的。現在通訊語言有了很大的發展。這些語言定義了語法和語義用于Agent間的通訊。KQML是一種用于軟件間交換信息和知識的語言和協議,為消息的表達和處理提供了標準的格式。其主要優點有: ⑴具有靈活的結構和良好的可擴充性;⑵獨立于網絡傳輸機制;⑶獨立于內容層表達語言;⑷能夠滿足間信息傳遞的基本要求。
例如:主體A發送一個動作表達式到主體B:
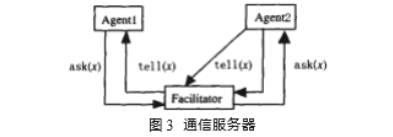
4.2 通信服務器
在KQML中,不是所有的對話都是一種簡單的問題/回答處理模型。每個主體可以使用ask(x)登錄它的知識到通信服務器。一個主體使用代理言語行為尋找其它主體提供它所需要的信息。通信服務器接收到查詢就尋找具有適當知識的主體。
SMGS系統中各進行協調時,各Agent對活動進行審查,若發現某個Agent活動在自身當前條件下不能滿足,則向相關Agent發出協調請求,參與協調的Agent可以通過黑板方式或其他方式進行協商。
5 結束語
本文提出了一種新的傳感器管理方法,即基于多Agent技術的管理方法。通過上述方式構造的傳感器管理系統利用了Agent基于知識表示及協調求解能力,具有實施簡單、系統運行高效、所需環境要求低等特點。充分發揮了傳感器自身的決策能力,減少決策過程對融合中心的依賴,提高了整個傳感器監視網絡的生存能力。下一步還應針對不同的需求進行廣泛的仿真實驗以分析各種管理策略的性能,并對規則庫進行修改和調整,在實際應用中對不同情況區別對待,充分利用系統資源,提高系統運作效率。
編輯:jq
-
傳感器
+關注
關注
2551文章
51099瀏覽量
753575 -
計算機
+關注
關注
19文章
7494瀏覽量
87955 -
人工智能
+關注
關注
1791文章
47279瀏覽量
238499 -
MAS
+關注
關注
0文章
16瀏覽量
10683
發布評論請先 登錄
相關推薦
探究傳感器故障的主要原因
多傳感器融合在自動駕駛中的應用趨勢探究

溫濕度傳感器是什么類型的傳感器
高壓放大器在傳感器基本傳感特性研究中的應用
藍牙數據模塊多連接方案讓傳感器更加智能

磁致伸縮位移傳感器原理,適配性,精度

LMP90100和LMP9009x傳感器AFE系統:多通道低功耗24位傳感器AFE數據表

用于手勢識別和臨床手功能康復的表皮肌電傳感器系統研究

多感科技攜自研的光學傳感器芯片及產品亮相深圳傳感器展覽會
淺談大型公共建筑能耗監測與信息管理系統研究及產品選型
淺談大型公共建筑能耗監測與信息管理系統研究及產品選型

Microchip推出10款多通道遠程溫度傳感器

多鏡頭多傳感器圖像視頻處理器應用






 工商網監
工商網監
評論