") 基于Raspberry Pi Pico的GPIO引腳使用運動傳感器
基于Raspberry Pi Pico的GPIO引腳使用運動傳感器
通過設(shè)置運動傳感器來學習輸入和輸出的基礎(chǔ)知識。
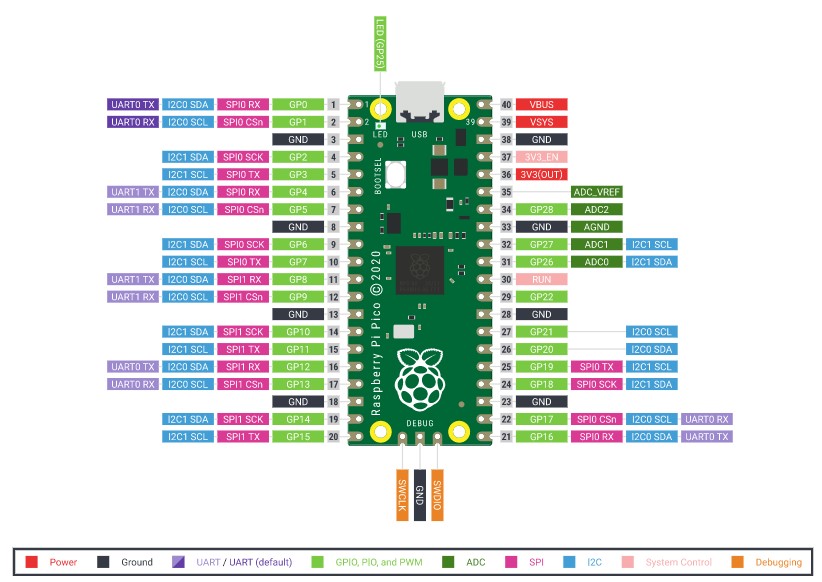
Raspberry Pi Pico具有許多GPIO引腳,我們只需在代碼中配置這些引腳即可將其用作輸入或輸出。在本指南中,我們將學習如何使用輸入(在這種情況下為傳感器)和以LED形式的輸出進行工作。在本指南的最后,我們將在16行MicroPython中提供一個簡單的運動檢測器。
在本指南中,我們將學習如何使用Raspberry Pi Pico的GPIO引腳作為數(shù)字輸入和輸出,這些輸入和輸出使用高電平和低電平作為一種簡單的控制方法。
建立
該項目的電路增加了一個額外的組件,即一種被動紅外(PIR)傳感器,該傳感器通常用于家庭安全系統(tǒng)中以檢測運動。在此項目中,它將執(zhí)行相同的功能,并且當傳感器報告運動時,我們的代碼將觸發(fā)一個LED亮起。
將傳感器添加到項目中需要:
? 半尺寸面包板
? LED燈
? 330歐姆電阻
? PIR傳感器
? 3 x母對公跳線
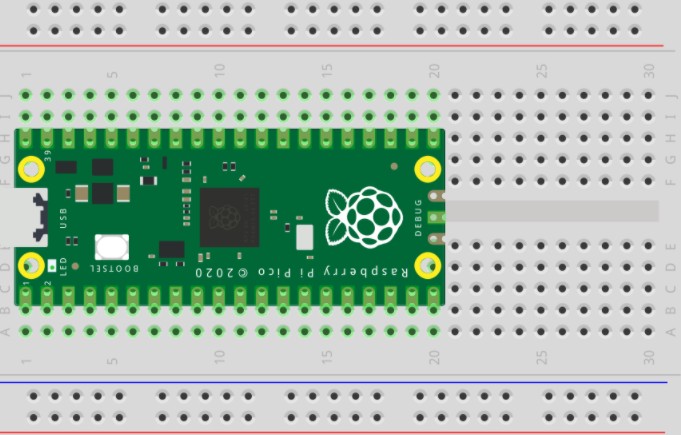
1.將Raspberry Pi Pico插入面包板,使其位于中央通道上方。確保Micro USB端口位于面包板的一端。
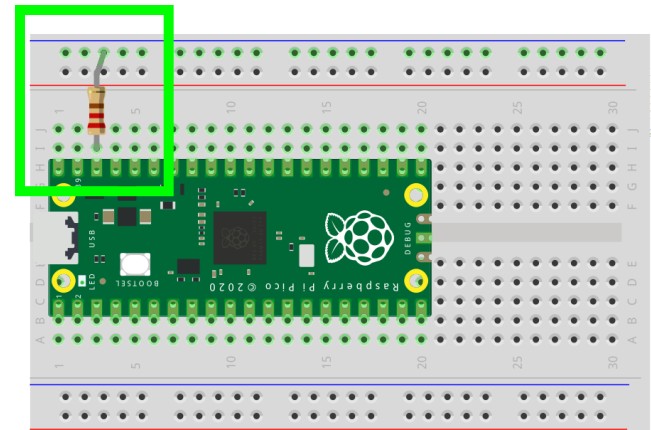
2.將一個330 Ohm的電阻器插入面包板,其一腳應與GND串聯(lián),該腳為PIN38。另一腳應插入面包板的-導軌。這為我們提供了GND導軌,其中該導軌中的所有引腳都連接到GND。
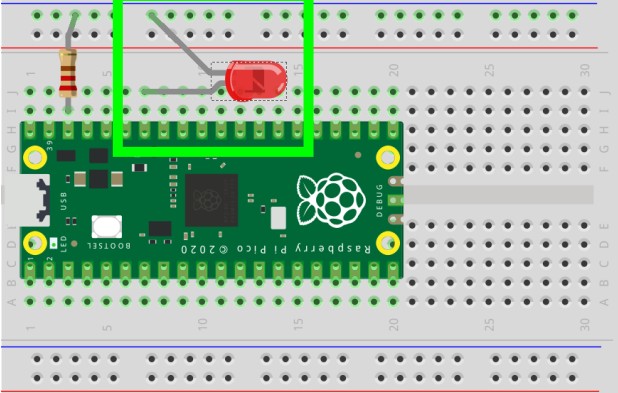
3. 插入一個LED,將長腳(陽極)插入面包板的針腳34,并將短腳插入GND導軌。現(xiàn)在已建立電路。
PIR傳感器具有三個引腳。VCC,OUT和GND。VCC引腳用于從Raspberry Pi Pico提供3.3V電源。

4.使用跳線將VCC從PIR連接到電阻旁邊的3.3V引腳(引腳37)。
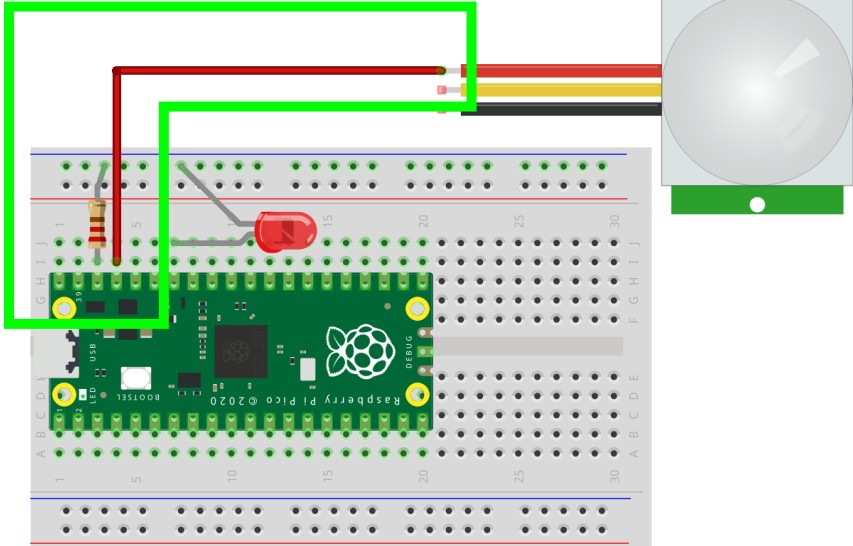
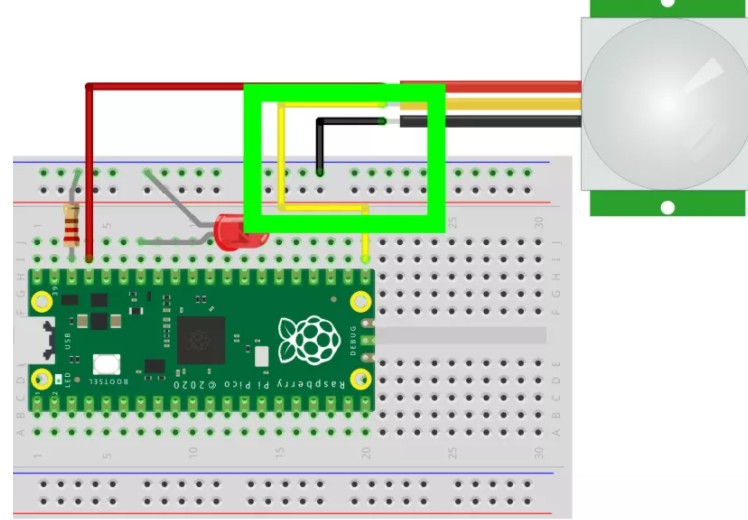
5.使用另一根跳線將PIR的OUT引腳連接到Pico的引腳21。
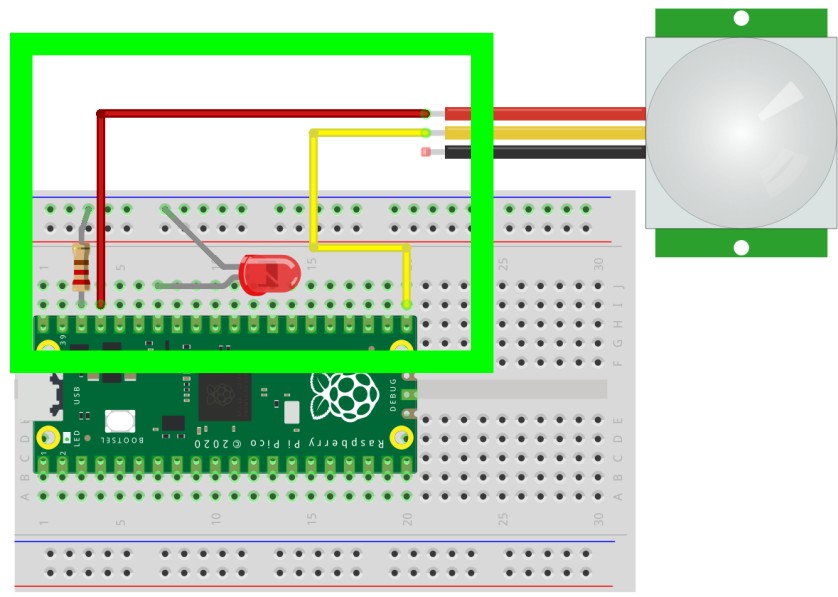
6.將PIR的GND引腳連接到面包板的GND導軌。
7.建立電路后,使用微型USB導線將Raspberry Pi Pico連接到計算機。打開Thonny應用程序。

現(xiàn)在,我們開始對項目進行編碼,并在“入門”項目中使用的代碼的基礎(chǔ)上,包括輸入,PIR傳感器和條件測試,以檢查傳感器是否已觸發(fā)。
1.從計算機庫中導入Pin類,然后導入utime。這些庫使我們能夠分別與GPIO通信并控制我們的項目進度。
from machine import Pin
import utime
2.創(chuàng)建一個對象“ led”,該對象用于在物理GPIO引腳和我們的代碼之間創(chuàng)建鏈接。在這種情況下,它將設(shè)置GPIO 28(映射到板上的物理引腳34)作為輸出引腳,其中電流將從Raspberry Pi Pico GPIO流入LED。然后,我們使用該對象指示GPIO引腳拉低。換句話說,這將確保在項目開始時GPIO引腳被關(guān)閉。
led = Pin(28, Pin.OUT)
3.創(chuàng)建另一個對象“ pir”。此對象用于在我們的代碼和GPIO引腳之間創(chuàng)建連接,該GPIO引腳用于從PIR進行OUT連接。默認情況下,PIR傳感器OUT被拉高,并且當檢測到移動時,PIR將OUT引腳拉低。為確保傳感器正常工作,我們將引腳設(shè)置為輸入,然后將GPIO引腳拉高。
pir = Pin(16, Pin.IN, Pin.PULL_UP)
4.確保在項目開始時LED熄滅,然后等待三秒鐘再繼續(xù)操作。這兩行確保我們不會從LED看到“錯誤觸發(fā)”,并給傳感器留出一些時間來穩(wěn)定使用。
led.low()
utime.sleep(3)
5.在while True循環(huán)(無盡循環(huán))中,使用打印功能來打印用于PIR傳感器的GPIO引腳的當前值。如果沒有移動,則返回1,如果沒有,則返回0。
while True:
print(pir.value())
6.創(chuàng)建一個條件測試,檢查存儲在pir.value中的值。如果值為0,則檢測到運動,然后將消息打印到Python Shell。然后打開LED(高電平)并暫停五秒鐘,同時保持LED點亮。
if pir.value() == 0:
print(“LED On”)
led.high()
utime.sleep(5)
7.沒有檢測到運動時,將激活條件測試的最后一部分。使用Else條件將消息打印到Python Shell,然后添加一行以關(guān)閉LED(低電平),然后暫停0.2秒。然后重復循環(huán),并再次運行條件測試。
else:
led.low()
utime.sleep(0.2)
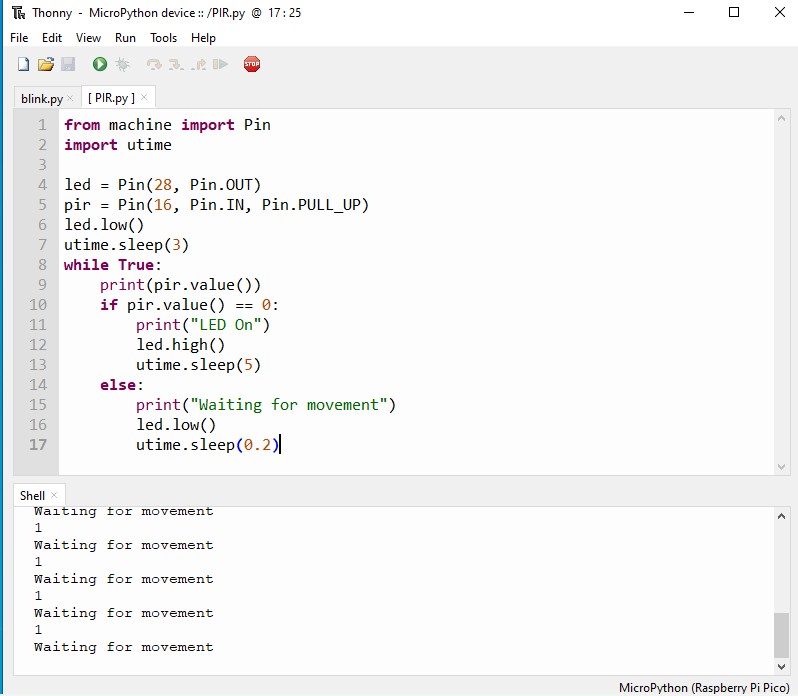
8.單擊保存,然后選擇將代碼保存到MicroPython設(shè)備(Raspberry Pi Pico)。將文件命名為PIR.py,然后單擊“確定”進行保存。您的代碼應如下所示。
from machine import Pin
import utime
led = Pin(28, Pin.OUT)
pir = Pin(16, Pin.IN, Pin.PULL_UP)
led.low()
utime.sleep(3)
while True:
print(pir.value())
if pir.value() == 0:
print(“LED On”)
led.high()
utime.sleep(5)
else:
print(“Waiting for movement”)
led.low()
utime.sleep(0.2)
9.要運行代碼,請單擊綠色播放/箭頭按鈕,然后Python Shell將更新為“等待移動”和“ LED亮”。PIR傳感器非常靈敏,起初您可能會看到一些誤觸發(fā),但傳感器會穩(wěn)定下來。
責任編輯:pj
-
傳感器
+關(guān)注
關(guān)注
2551文章
51099瀏覽量
753572 -
檢測器
+關(guān)注
關(guān)注
1文章
864瀏覽量
47687 -
計算機
+關(guān)注
關(guān)注
19文章
7494瀏覽量
87954
發(fā)布評論請先 登錄
相關(guān)推薦
Raspberry Pi Pico是什么
使用raspberry pi Pico的原因
基于raspberry pi pico的EPS系統(tǒng)
Raspberry Pi 4/3B的Pico開發(fā)板
一個印有PINOUT的Raspberry Pi pico分線板
將Esp8266的vcc和ch pd引腳連接到raspberry pi pico 3.3v時不起作用是為什么?
Raspberry Pi Pico是什么?有哪些主要特點
Raspberry Pi Pico:使用PIO驅(qū)動伺服

使用Raspberry Pi Pico的LED序列
如何使用GPIO引腳將按鈕連接到Raspberry Pi
通過Raspberry Pi和Python使用PIR運動傳感器
遠程編程Raspberry Pi Pico
Raspberry Pi上HA中的運動傳感器、警報、視頻錄制
Raspberry Pi Pico 2





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論