 基于W77E58單片機和68HC908MR16芯片實現串行通信監控系統的設計
基于W77E58單片機和68HC908MR16芯片實現串行通信監控系統的設計
引言
Winbond公司的新型單片機W77E58,內含2個增強型串口和32KB大容量 Flash存儲器。指令集與51系列單片機完全兼容,非常適合在智能化監控系統中使用。本系統將3臺單相逆變器聯接成令牌網,采用標準RS485接口與逆變系統及上位機同時進行串行通信,能夠實時地在液晶屏或上位機上顯示逆變系統的運行狀態,并可以方便地對系統參數進行修改。
1 系統硬件設計
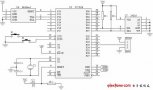
圖1所示為W77E58監控系統單機雙串口通信的硬件框圖。該電路符合最簡單的RS485總線接口標準。其中逆變系統采用Motorola公司的電機控制專用芯片68HC908MR16(以下簡稱MR16)作為主控芯片。該芯片內含一個標準的可編程串行通信接口SCI模塊,通過RS485接口芯片MAX3082與W77E58的串行口0進行通信。同時,W77E58串行口1通過MAX3082傳輸的數據,經過一個RS485到RS232的電平轉換器與上位機進行通信。通信電路都采用了光耦隔離。
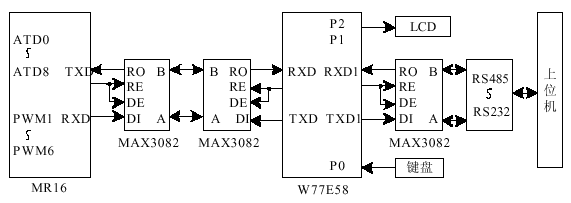
圖1 W77E58監控系統單機雙串口通信硬件框圖
圖1中使用Maxim公司的MAX3082作為RS485接口芯片,適用于半雙工通信。它采用平衡驅動和差分接收,具有抑制共模干擾的能力,可用于惡劣環境中,最大通信距離達1200m。它具有發送使能和接收使能控制。當使能無效時,發送和接收的輸出端呈高阻狀態。使用MAX3082構成通信系統時,最大通信速率為0.125Mb/s,傳輸線上最多可掛128個收發器。
本系統采用非編碼鍵盤,擬用四個鍵:OK鍵、CANCEL鍵、UP鍵、DOWN鍵。采用一鍵復用技術使這四個鍵完成系統設定、參數修改、運行狀態顯示等功能。
這里使用的液晶顯示器LCD為CAG1264-4點陣式液晶。該液晶內帶亮度可調的背光源,輕盈超薄、編程靈活,整屏可以顯示8×4個國標漢字或16×4個ASCII碼。硬件接口采用8位并行數據格式,握手協議簡單可靠。
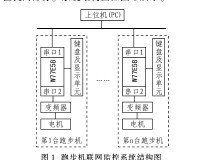
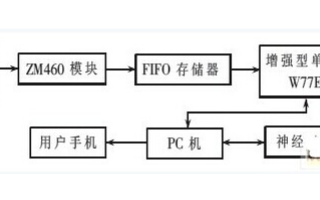
由于工業上常用到三相交流電,所以本系統還具有將三臺單相逆變器經過組網,自同步實現三相交流輸出的功能。如圖2所示,三臺單相逆變器串行口輸出經過連接,組成一個簡單的令牌網,然后通過RS485到RS232的電平轉換器統一由上位機進行管理控制。
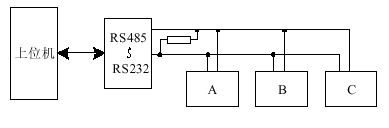
圖2 多機聯網硬件結構框圖
2 串行口介紹及初始化設置
本通信系統中,我們規定,每1幀數據為10位:1位起始位,8位數據位,1位停止位。波特率均設置為9600bps。
2.1 W77E58串口
W77E58單片機其串口增強型特征在于特有的地址自動識別和幀出錯診斷功能。需要注意的是,串口0可以使用定時器T1或定時器T2作為波特率發生器;而串口1只能使用定時器T1作為其波特率發生器。下面以串口0為例,對W77E58串口的工作過程進行簡單介紹。
串口0通過引腳RXD(串行數據接收端)和TXD(串行數據發送端)進行串行通信,可同時發送和接收數據,具有兩個物理上獨立的接收、發送緩沖器SBUF,它們占用同一地址。串行口的發送和接收都是以特殊功能寄存器SBUF的名義進行讀或寫的,發送數據完畢或接收到數據都會由硬件置位發送中斷標志TI或接收中斷標志RI。值得注意的是,中斷標志TI、RI均需由軟件來清零。串口1的工作過程和串口0相類似,只需對其相應的寄存器及標志位進行類似操作即可。W77E58串行口是可編程接口,對它初始化編程只需對特殊功能寄存器SCON或SCON1和電源控制寄存器PCON寫入相應的控制字即可。這里使用定時器T2作為串口0的波特率發送器,使用定時器T1作為串口1的波特率發生器。波特率均設為9600bps。
2.2 MR16串口
MR16帶有的1個可編程串行通信接口SCI模塊,支持MCU與外設之間采用全雙工、異步、NRZ(非歸零)格式進行串行通信。它具有2個I/O引腳RXD和TXD;有2個物理上獨立的,但占用同一地址的SCI數據寄存器SCDR。SCI模塊為接收器和發送器提供獨立的中斷請求和中斷向量。如果SCRIE位被置位,當SCI接收到一個完整的數據幀,并將數據傳送到SCDR,就會置位SCRF標志并啟動一個接收中斷;如果 SCTIE位被置位,并將數據由SCDR傳送至發送移位寄存器時,就會置位標志SCTE產生一個發送中斷。在讀取SCDR中的數據或寫入SCDR新的數據后,SCRF和SCTE會被自動清零,無需軟件操作。SCI模塊具有一個可編程的波特率發生器,可產生32種不同的波特率,只需對波特率寄存器SCBR進行設置即可。
2.3 上位機串口
由于上位機串口采用的是RS232標準接口,所以需要1個RS485與 RS232的電平轉換器才能實現與下位機的通信。這里,采用的電平轉換器件是牛頓-7520,輸入電壓范圍為10 ~ 30V,允許的頻率范圍為300Hz ~ 115kHz。
3 通信協議
本系統中MR16與W77E58及上位機三方都既是發送方又是接收方,都工作在半雙工模式。MR16和上位機的發送和接收均采用查詢方式,W77E58的串口0和串口1發送均采用查詢方式,接收均采用中斷方式。要想保證通信準確可靠,通信雙方除規定好字符格式和波特率外,還要定義好通信協議。通過分析和實驗,最后確定了MR16和W77E58之間通信以77E58為主。W77E58和上位機之間通信以上位機為主的“主從通信法”通信協議。下面以 W77E58串口0和上位機為例,將這種通信協議介紹如下。
◆ W77E58串行口0通信協議(以W77E58為主機)
發送(查詢方式):
fe+fe+fe+代碼 。..。..請求回發相應代碼的數據包
fe+fe+ef+代碼+高字節+低字節+校驗和 。..。..發送要修改的數據包
接收(中斷方式):
fe+fe+aa+故障代碼 。..。..接收故障代碼
fe+fe+fe+代碼+高字節+低字節+校驗和 。..。..接收要顯示的數據包
◆ 上位機通信協議(以上位機為主機)
發送(查詢方式):
fe+fe+站號 。..。..查詢相應站點
fe+fe+fe 。..。..請求回發要顯示的數據包
接收(查詢方式):
fe+fe+站號 。..。..接收回發校驗站號
fe+fe+高字節+低字節+校驗和 。..。..接收要顯示的數據包
協議里的斜體為包頭碼,黑體加下劃線為命令碼,站號即為多機通信時用于選擇單相逆變器的令牌,每臺單相逆變器的站號均不相同。數據包的包頭均是0xfe,0xfe。以 W77E58串口0為例,當W77E58使用命令0xfe向MR16請求回發相應代碼的數據包后,若接收到命令0xaa,則表明有故障,然后根據收到的故障代碼進行相應的故障顯示;若收到命令0xfe,則把收到的參數值送給液晶顯示器進行顯示。
從數據包格式可以看出,MR16和 W77E58之間通信以W77E58為主,W77E58和上位機之間通信以上位機為主,MR16的發送和接收都是由W77E58串口0來控制的,而 W77E58串口1的發送和接收又都是由上位機來控制的,這種主從方式是RS485標準中常采用的模式。這里通過發送包頭的辦法來實現數據同步,發送方每次都必須先發送包頭,然后再發送數據;接收方只有在正確接收包頭后才開始接收數據。當接收數據出錯或發送的數據丟失時就放棄本次接收,在下個主循環重新通信。這樣可以在一次通信出錯后自動恢復,同時避免“死機”現象的發生。
4 軟件實現
基于對該監控通信系統通用性的考慮,我們采用了模塊化設計方法,將通信程序作為主程序的一個模塊來處理。因為BCD碼是以數字“0”到“9” 開頭的,而控制命令則以字母“A”到“F”開頭,在發送端將數據轉化成BCD碼發送。這樣可區分這兩類信號,在接收端分別將它們解碼處理。
這里給出了W77E58串口0查詢發送程序、中斷接收程序及上位機的查詢接收程序,程序流程如圖3、4、5所示。MR16通信模塊包括查詢接收程序和查詢發送程序,程序流程類似于圖3;W77E58串口1通信模塊包括中斷接收程序和查詢發送程序,程序流程與串口0相類似,這里都不再給出。
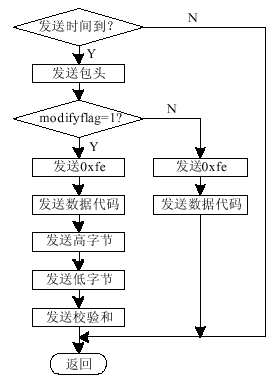
圖3 W77E58串口0查詢發送程序
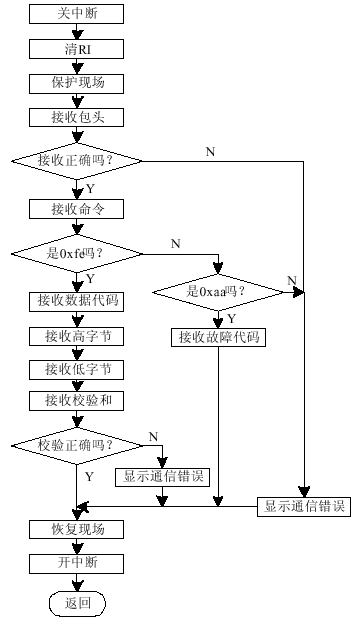
圖4 W77E58串口0中斷接收程序
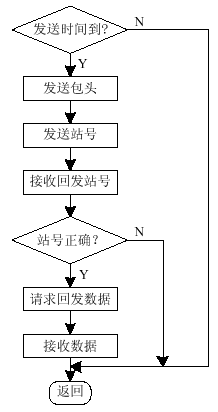
圖5 上位機的查詢接收程序
責任編輯:gt
-
單片機
+關注
關注
6037文章
44558瀏覽量
635298 -
存儲器
+關注
關注
38文章
7492瀏覽量
163834 -
監控系統
+關注
關注
21文章
3914瀏覽量
174706
發布評論請先 登錄
相關推薦
基于W77E58單片機的光伏并網電站智能群控器設計
增強型51系列單片機W77E58的存儲器訪問
基于W77E58單片機的通用GSM無線傳真終端實現
基于68HC908MR16單片機的光伏正弦波逆變電源
基于W77E58單片機的光伏并網電站智能群控器設計
基于W77E58的跑步機聯網系統的開發
基于68HC908MR16單片機的光伏正弦波逆變電源
基于68HC908MR16單片機的空間矢量控制變頻電源
高速單片機W77E58的特點及應用
基于W77E58單片機和EPM7128芯片實現雷達網絡測控系統的設計
基于W77E58單片機和Neuron 3150實現圖像采集系統的設計





 工商網監
工商網監
評論