") 解讀$PRO_IP當前KRL處理的處理指針
解讀$PRO_IP當前KRL處理的處理指針
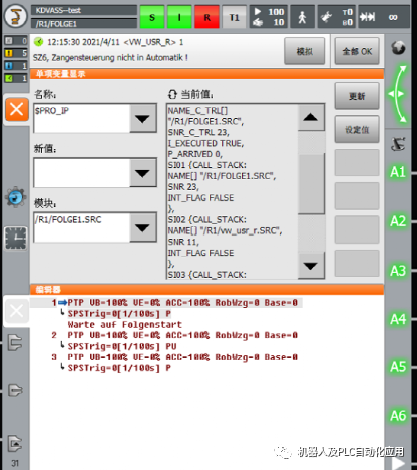
$PRO_IP
參照解釋器,使用過程指針的數(shù)據(jù)進行結(jié)構(gòu)化
該變量包含將在解釋器中接下來執(zhí)行的塊的數(shù)據(jù)。
根據(jù)特定的解釋器,對數(shù)據(jù)的訪問如下:
l?在機器人程序中讀取變量是指機器人解釋器的狀態(tài)。
l?在提交程序中讀取變量是指關(guān)聯(lián)的提交解釋器的狀態(tài)。
l?通過變量校正功能對變量的讀/寫指的是$ INTERPRETER的當前值。
$ INTERPRETER的可能值取決于機器人控制器所處的“提交”模式。
單提交模式(默認操作模式)中的機械手控制器:
?0:提交口譯員
?1:機器人口譯員
多提交模式下的機器人控制器(僅適用于KUKA System Software 8.3和更高版本):
?1:機器人口譯員
?2:系統(tǒng)提交解釋器
?3:擴展提交解釋器1
?4:擴展提交解釋器2
?…
?9:擴展提交解釋器7
$ PRO IP在提交解釋器中包含以下初始化組件:
? $PRO_IP.SNR
? $PRO_IP.Name[]
? $PRO_IP.I_Executed
組件$ PRO_IP.P_Arrived沒有在其子解釋器中初始化。讀取提交程序中的組件P_Arrived會觸發(fā)錯誤消息{$ variable}值invalid。
為了能夠讀取提交程序中的機器人解釋程序組件P_Arrived,必須使用變量$ PRO_IP1:
IF ($PRO_IP1.P_Arrived == 1) THEN …
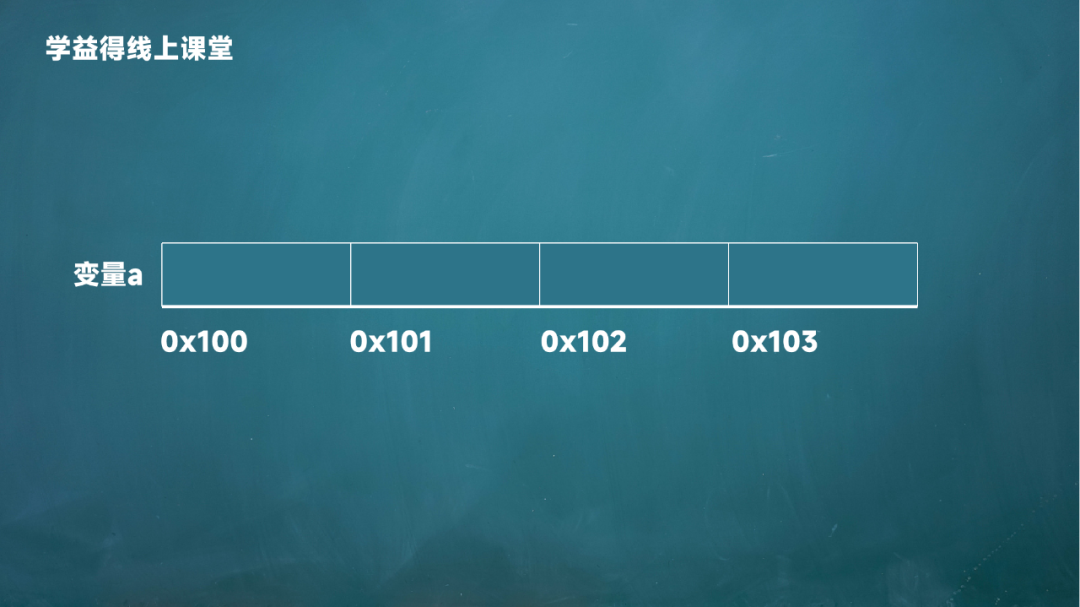
$PRO_IP= Process data 類型: Pro_Ip
具有流程指針的當前數(shù)據(jù)的結(jié)構(gòu)
Pro_Ip:
STRUC Pro_Ip CHAR name[32], INT snr, CHAR name_c[32], INT snr_c, BOOL i_executed, INT p_arrived, CHAR p_name[24], CALL_STACK S101, S102, …S110
name[]:解釋程序在其中進行的模塊名稱
snr: 解釋程序正在運行的程序段號(通常不等于程序的行號)
name_c[]:主運行中插補器所在的模塊的名稱
snr_c: 主運行中插補器所在的程序段號
i_executed: 指示該塊是否已經(jīng)由解釋器執(zhí)行(= TRUE)
p_arrived:指示機器人所在路徑上的點(僅與運動指令有關(guān))
?0:到達運動的目標或輔助點
?1:未達到目標點(機器人在路徑上某處)
?2:不相關(guān)
?3:到達CIRC或SCIRC運動的輔助點
?4:在起點和輔助點之間的區(qū)域中移動
p_name[]:機器人所位于的目標或輔助點的名稱或集合
S101 … 解釋器所在的調(diào)用者堆棧
S110
$PRO_IP0: 在提交解釋器中使用過程指針的數(shù)據(jù)進行結(jié)構(gòu)
該變量包含將由提交解釋器接下來執(zhí)行的塊的數(shù)據(jù)。可以通過機器人程序和提交程序讀取變量。也可以使用變量校正功能將數(shù)據(jù)寫入其中。
如果在多提交模式下操作機器人控制器(僅在KUKA System Software 8.3及更高版本中可用),則該變量無關(guān)緊要。在多提交模式下,機器人控制器的系統(tǒng)狀態(tài)被分組在變量$ PROG_INFO []中。
$PRO_IP1: 機器人解釋器中帶有過程指針數(shù)據(jù)的結(jié)構(gòu)
該變量包含將由機器人解釋器接下來執(zhí)行的塊的數(shù)據(jù)。可以通過機器人程序和提交程序讀取變量。也可以使用變量校正功能將數(shù)據(jù)寫入其中。
編輯:jq
-
機器人
+關(guān)注
關(guān)注
211文章
28524瀏覽量
207552 -
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7085瀏覽量
89214 -
程序
+關(guān)注
關(guān)注
117文章
3792瀏覽量
81171 -
解釋器
+關(guān)注
關(guān)注
0文章
103瀏覽量
6543
原文標題:$PRO_IP當前KRL處理的處理指針
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
芯原顯示處理器IP DC8200-FS獲得ISO 26262 ASIL B認證
盛顯科技:解決投影融合處理器連接超時問題的步驟

TICS pro一直無法識別任何設(shè)備,請問如何處理,如何恢復出廠設(shè)置?
芯原畸變矯正處理器IP DW200-FS已通過ISO 26262 ASIL B認證
IP地址庫:從收集到處理

面試常考+1:函數(shù)指針與指針函數(shù)、數(shù)組指針與指針數(shù)組

一加 Ace 3 Pro搭載逐點半導體視覺處理器帶來游戲體驗新升級
巖土工程監(jiān)測中振弦采集儀數(shù)據(jù)處理與解讀的挑戰(zhàn)與方法

慧視Viztra-ME025圖像處理板 中端性能的RK3399Pro板卡

CapCut Pro APK的特點功能及優(yōu)勢
芯原股份DC8200顯示處理器IP助力賽昉科技RISC-V架構(gòu)SoC
賽昉基于RISC-V的JH-7110智能視覺處理平臺采用了芯原的顯示處理器IP
C語言的指針用法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論