") 關(guān)于機器人外部自動運行模式的過程和配置解析
關(guān)于機器人外部自動運行模式的過程和配置解析
1.通過外部自動運行接口可用上級控制器(例如用一個PLC)來控制機器人進(jìn)程。
2.上級控制系統(tǒng)通過外部自動運行接口向機器人控制系統(tǒng)發(fā)出機器人進(jìn)程的相關(guān)信號 (如運行許可、故障確認(rèn)、程序啟動等)。機器人控制系統(tǒng)向上級控制系統(tǒng)發(fā)送有關(guān)運行狀態(tài)和故障狀態(tài)的信息。
輸入端 (從機器人控制器的角度)PGNO_TYPE - 程序號類型此變量確定了以何種格式來讀取上級控制系統(tǒng)傳送的程序編號。
如下表進(jìn)行說明:
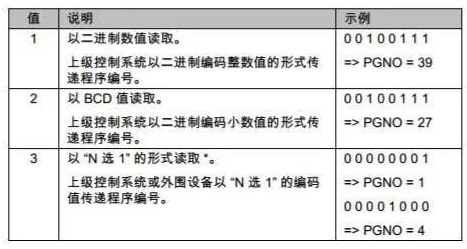
備注:采用這種傳遞格式時,未對 PGNO_REQ、PGNO_PARITY 以及
PGNO_VALID 的值進(jìn)行分析,因此無意義。
PGNO_LENGTH - 程序號長度此變量確定了上級控制系統(tǒng)傳送的程序編號的位寬。值域:1 … 16。若 PGNO_TYPE 的值為 2,則只允許位寬為 4、8、12 和 16。PGNO_PARITY - 程序號的奇偶位上級控制系統(tǒng)傳遞奇偶位的輸入端。

如果 PGNO_TYPE 值為 3,則 PGNO_PARITY 不被分析。PGNO_VALID - 程序號有效上級控制系統(tǒng)傳送讀取程序號指令的輸入端。
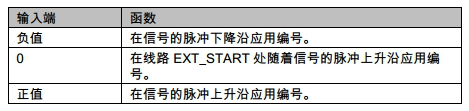
$EXT_START - 外部啟動設(shè)定了該輸入端后,輸入 / 輸出接口激活時將啟動或繼續(xù)一個程序 (一般為 CELL.SRC)。備注:僅分析信號的脈沖上升沿。在外部自動運行中無 BCO 運行。這表明,機器人在啟動之后以編程設(shè)定的速度 (沒有減速)到達(dá)第一個編程設(shè)定的位置,并且不停在那里。
$MOVE_ENABLE - 允許運行該輸入端用于由上級控制器對機器人驅(qū)動器進(jìn)行檢查。

備注:當(dāng)驅(qū)動裝置由上級控制器停住后,將顯示 “ 開通全部運行 ” 的信息提示。刪除了該信息提示并且重新發(fā)出外部啟動信號后機器人才能重新運動。投入運行時變量 $MOVE_ENABLE 常常設(shè)計為值 $IN[1025]。如果此后忘記設(shè)計另一個輸入端,則不能外部啟動。
$CONF_MESS - 確認(rèn)信息提示通過給該輸入端賦值,當(dāng)故障原因排除后,上級控制器將自己確認(rèn)故障信息。備注:僅分析信號的脈沖上升沿。
$DRIVES_ON - 驅(qū)動裝置接通如果在此輸入端上施加了持續(xù)至少20毫秒的高脈沖,則上級控制系統(tǒng)會接通機器人驅(qū)動裝置。
$DRIVES_OFF - 驅(qū)動裝置關(guān)閉如果在此輸入端上施加了持續(xù)至少20毫秒的低脈沖,則上級控制系統(tǒng)會關(guān)斷機器人驅(qū)動裝置。輸出端 (從機器人控制器的角度)
$ALARM_STOP - 緊急停止該輸出端將在出現(xiàn)以下緊急停止情形時復(fù)位:1.按下了庫卡控制面板 (KCP)上的緊急停止按鍵。(內(nèi)部緊急關(guān)斷)2.外部緊急停止注意:出現(xiàn)緊急停止時可從輸出端 $ALARM_STOP 和 Int. NotAus 的狀態(tài)看出是哪種緊急停止:兩個輸出端均為 FALSE:觸發(fā)了庫卡控制面板 (KCP)上的緊急停止按鍵
$ALARM_STOP FALSE,Int. NotAus TRUE:外部緊急停止$USER_SAF - 操作人員防護(hù)裝置 / 防護(hù)門該輸出端在打開護(hù)欄詢問開關(guān) (運行方式 AUT)或放開確認(rèn)開關(guān) (運行方式 T1 或 T2)時復(fù)位。
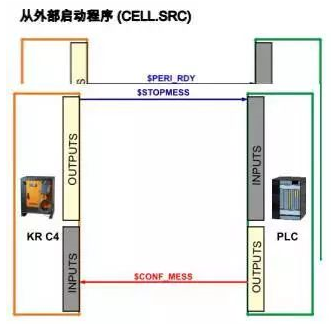
$PERI_RDY - 驅(qū)動裝置處于待機狀態(tài)通過設(shè)定此輸出端機器人控制系統(tǒng)通知上級控制系統(tǒng)機器人驅(qū)動裝置已接通。
$STOPMESS - 停止信息該輸出端由機器人控制系統(tǒng)來設(shè)定,以向上級控制器顯示出現(xiàn)了一條要求停住機器人的信息提示。(例如:緊急停止按鍵、運行開通或操作人員防護(hù)裝置)確認(rèn)信息提示前提條件 $STOPMESS - 有停止信息確認(rèn)信息提示 $CONF_MESS - 確認(rèn)信息提示可確認(rèn)的信息提示就此刪除 $STOPMESS - 不再有停止信息,現(xiàn)在可撤回 $CONF_MESS。
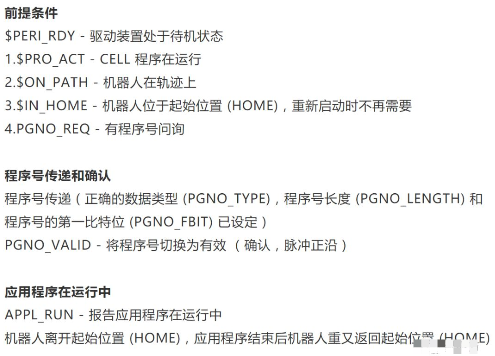
前提條件1)$PERI_RDY - 驅(qū)動裝置處于待機狀態(tài)2)$IN_HOME - 機器人位于起始位置(HOME)3)無 $STOPMESS - 無停止信息
外部啟動$EXT_START - 接通外部啟動 (脈沖正沿)CELL 程序在運行1.$PRO_ACT - 報告 CELL 程序在運行2.$ON_PATH - 一有機器人位于軌跡上的反饋,信號 $EXT_START 便撤回。處理程序傳遞和應(yīng)用程序
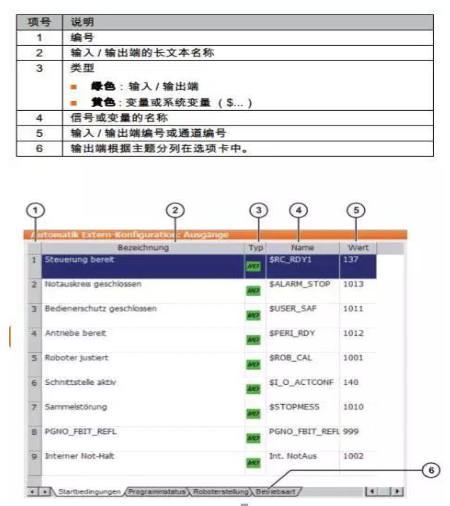
操作步驟1. 在主菜單中選擇配置 》 輸入 / 輸出端 》 外部自動運行。2. 在數(shù)值欄中標(biāo)定所需編輯的單元格,然后點擊編輯。3. 輸入所需數(shù)值,并用 OK 加以保存。4. 對所有待編輯的數(shù)值重復(fù)第 2 和第 3 步。5. 關(guān)閉窗口。改動即被應(yīng)用。
責(zé)任編輯:lq6
-
控制器
+關(guān)注
關(guān)注
112文章
16434瀏覽量
178976 -
機器人
+關(guān)注
關(guān)注
211文章
28618瀏覽量
207917 -
plc
+關(guān)注
關(guān)注
5016文章
13376瀏覽量
464704 -
接口
+關(guān)注
關(guān)注
33文章
8685瀏覽量
151651
原文標(biāo)題:庫卡機器人---外部自動運行模式過程和配置
文章出處:【微信號:AMTBBS,微信公眾號:世界先進(jìn)制造技術(shù)論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
開源項目!能夠精確地行走、跳舞和執(zhí)行復(fù)雜動作的機器人—Tillu
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
關(guān)于全自動裝車機器人的詳細(xì)介紹
認(rèn)識機器人與CW32四足機器人控制項目
焊接機器人示教模式怎么設(shè)置






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論