") 連續(xù)波與脈沖系統(tǒng)的優(yōu)劣比較
連續(xù)波與脈沖系統(tǒng)的優(yōu)劣比較
3D飛行時(shí)間,或3D ToF是一種無(wú)掃描儀LiDAR(光檢測(cè)和測(cè)距)技術(shù),通過(guò)發(fā)射納秒級(jí)的高功率光脈沖來(lái)捕獲相關(guān)場(chǎng)景的深度信息(通常是短距離內(nèi))。飛行時(shí)間技術(shù)在深度測(cè)量和物體檢測(cè)的領(lǐng)域發(fā)揮著重要作用,如工廠自動(dòng)化、機(jī)器人以及物流應(yīng)用。特別是在安全方面,需要對(duì)特定距離的物體或人員進(jìn)行檢測(cè)和響應(yīng)。例如一旦工人進(jìn)入危險(xiǎn)區(qū)域,機(jī)械臂可能需要立即停止。
飛行時(shí)間技術(shù)概述
飛行時(shí)間技術(shù)利用調(diào)制光源(例如激光)主動(dòng)照射物體,然后用對(duì)激光波長(zhǎng)敏感的傳感器捕捉反射光,即利用數(shù)據(jù)信號(hào)在一對(duì)收發(fā)機(jī)之間往返的飛行時(shí)間來(lái)測(cè)量?jī)牲c(diǎn)間的深度。
如下圖所示,時(shí)間延遲ΔT與發(fā)射端和物體之間的兩倍深度(往返)成正比;因此,深度(d) 可以估算為 d= (cΔT)/2,其中c表示光速。
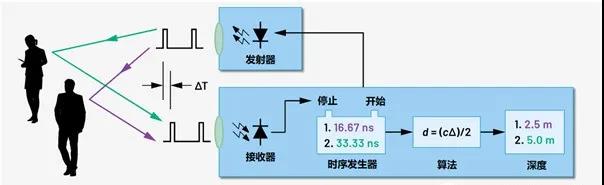
目前有多種不同的測(cè)量時(shí)間延遲的方法,其中兩種最為常用:連續(xù)波(CW)方法和脈沖方法。值得注意的是,目前在市面上使用的絕大多數(shù)連續(xù)波ToF系統(tǒng)都使用CMOS傳感器,脈沖ToF系統(tǒng)則使用非CMOS傳感器(特別是CCD)。
連續(xù)波與脈沖系統(tǒng)的優(yōu)劣比較
連續(xù)波系統(tǒng)是測(cè)量發(fā)射和接收的調(diào)制脈沖之間的相移,而脈沖系統(tǒng)式是測(cè)量發(fā)射和接收之間脈沖經(jīng)過(guò)的時(shí)間,兩者測(cè)量模式都各有優(yōu)點(diǎn)和缺點(diǎn)。
連續(xù)波系統(tǒng)的優(yōu)點(diǎn)
對(duì)于對(duì)精度要求不高的應(yīng)用,連續(xù)波系統(tǒng)可能比脈沖系統(tǒng)更容易實(shí)現(xiàn),因?yàn)樗灰蠹す饷}沖非常短,也不需要具有超快的上升/下降沿,當(dāng)然在實(shí)際中很難復(fù)制完美的正弦波。但是,如果精度要求變得更嚴(yán)格,那么將需要更高頻率的調(diào)制信號(hào),這實(shí)際上很難實(shí)現(xiàn)。
由于激光信號(hào)具有周期性,所以連續(xù)波系統(tǒng)測(cè)量中的任何相位測(cè)量每隔2π會(huì)重復(fù)一次,意味著會(huì)產(chǎn)生一個(gè)混疊距離。對(duì)于只有一個(gè)調(diào)制頻率的系統(tǒng),混疊距離也是最大可測(cè)距離。為了應(yīng)對(duì)這個(gè)限制,可以使用多個(gè)調(diào)制頻率來(lái)執(zhí)行相位展開(kāi),其中,如果兩個(gè)(或多個(gè))具有不同調(diào)制頻率的相位測(cè)量值與估算的深度一致,就可以確定與物體之間的真實(shí)深度。這種多重調(diào)制頻率方案也可以用于減少多路徑誤差——多路徑誤差是由于一個(gè)物體的反射光擊中另一個(gè)物體(或在鏡頭內(nèi)部反射),然后返回到傳感器時(shí)會(huì)導(dǎo)致的測(cè)量誤差。
連續(xù)波系統(tǒng)的溫度校準(zhǔn)可能比脈沖系統(tǒng)更容易。隨著系統(tǒng)溫度升高,解調(diào)信號(hào)和激光信號(hào)會(huì)因?yàn)闇囟茸兓舜似疲@種偏移只會(huì)影響測(cè)量距離,在整個(gè)距離范圍內(nèi)始終存在偏置誤差,而深度線性度則基本保持穩(wěn)定。
連續(xù)波系統(tǒng)的缺點(diǎn)
雖然與其他傳感器相比,CMOS傳感器具有更高的輸出數(shù)據(jù)速率,但連續(xù)波傳感器需要在多個(gè)調(diào)制頻率下獲得4個(gè)相關(guān)函數(shù)樣本,并使用多幀處理來(lái)計(jì)算深度。較長(zhǎng)的曝光時(shí)間可能會(huì)限制系統(tǒng)的整體幀率,或?qū)е逻\(yùn)動(dòng)模糊,因此只能在有限類(lèi)型的應(yīng)用中使用。這種更高的處理復(fù)雜性可能需要用到外部應(yīng)用處理器,而這可能超出了應(yīng)用的需求。
對(duì)于更遠(yuǎn)距離的測(cè)量或者更強(qiáng)環(huán)境光的場(chǎng)景,更高的連續(xù)光功率(與脈沖系統(tǒng)相比)則十分必要,但這種高強(qiáng)度的連續(xù)光信號(hào)則可能導(dǎo)致散熱和可靠性的問(wèn)題。
脈沖系統(tǒng)的優(yōu)點(diǎn)
脈沖系統(tǒng)通常依賴(lài)于在很短的時(shí)間窗口內(nèi)發(fā)出高能光脈沖。它具有下列優(yōu)點(diǎn):
更加便于設(shè)計(jì)魯棒性強(qiáng)的系統(tǒng),因此更適用于戶外。
曝光時(shí)間越短,運(yùn)動(dòng)模糊的效應(yīng)越小。
脈沖系統(tǒng)中的信號(hào)占空比通常比同等水平的連續(xù)波系統(tǒng)要低得多,因此具有以下優(yōu)點(diǎn):
對(duì)于長(zhǎng)期工作的應(yīng)用,可以降低系統(tǒng)的總功耗。
通過(guò)將脈沖群放置在與其他系統(tǒng)不同的幀位置,從而避免來(lái)自其他脈沖ToF系統(tǒng)的干擾。這可以通過(guò)協(xié)調(diào)各種系統(tǒng)在一幀中為激光脈沖選擇不同的位置,或者使用外部光電探測(cè)器來(lái)確定其他系統(tǒng)脈沖的位置來(lái)實(shí)現(xiàn)。另一種方法是動(dòng)態(tài)隨機(jī)排列脈沖群的位置,這樣就無(wú)需協(xié)調(diào)各個(gè)系統(tǒng)之間的時(shí)序,但這種方法無(wú)法完全消除干擾。
由于脈沖時(shí)序和寬度不需要一樣,所以可以采用不同的時(shí)序方案,支持實(shí)現(xiàn)更寬的動(dòng)態(tài)范圍和自動(dòng)曝光等功能。
脈沖系統(tǒng)的缺點(diǎn)
由于發(fā)射光脈沖的脈寬和快門(mén)的脈寬需要保持相同,所以系統(tǒng)的時(shí)序控制需要非常精確,根據(jù)應(yīng)用需要,可能需要達(dá)到皮秒級(jí)精度。
為了達(dá)到最大效率,激光脈沖寬度必須非常短,但同時(shí)必須具有極高的功率。因此,激光驅(qū)動(dòng)器需要實(shí)現(xiàn)非常快的上升/下降沿(<1ns)。
與連續(xù)波系統(tǒng)相比,其溫度校準(zhǔn)過(guò)程可能更為復(fù)雜,因?yàn)闇囟鹊淖兓瘯?huì)影響單個(gè)脈沖寬度,不僅影響偏置和增益,還會(huì)影響其線性度。
在市場(chǎng)上,一些半導(dǎo)體制造商提供完整的3D飛行時(shí)間的解決方案,如ADI將深度處理器、高精度時(shí)序發(fā)生器和電源管理等集成到一個(gè)具有可編程時(shí)序和 V 驅(qū)動(dòng)器的 CCD 飛行時(shí)間信號(hào)處理器——ADDI9036.
ToF解決方案的選擇
如果想搜尋一些與飛行時(shí)間相關(guān)的器件或開(kāi)發(fā)資料,可以直接在Digi-Key的官網(wǎng)以“ 飛行時(shí)間 ”作為關(guān)鍵詞進(jìn)行搜索。
無(wú)論是搜索與飛行時(shí)間相關(guān)處理器的、評(píng)估板(AD-96TOF1-EBZ),還是傳感器,都可以輕松找到。
本文小結(jié)
3D飛行時(shí)間技術(shù)在工業(yè)、制造和建筑過(guò)程中可以實(shí)時(shí)準(zhǔn)確地確定尺寸并進(jìn)行分類(lèi),幫助用戶解決相關(guān)應(yīng)用領(lǐng)域中的難題,在深度測(cè)量和物體檢測(cè)領(lǐng)域中發(fā)揮著重要作用。
原文標(biāo)題:3D ToF很火,兩種技術(shù)方案孰優(yōu)孰劣?最詳盡的分析來(lái)了~
文章出處:【微信公眾號(hào):得捷電子DigiKey】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
責(zé)任編輯:haq
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28420瀏覽量
207111 -
3D
+關(guān)注
關(guān)注
9文章
2878瀏覽量
107549 -
掃描儀
+關(guān)注
關(guān)注
2文章
424瀏覽量
67862
原文標(biāo)題:3D ToF很火,兩種技術(shù)方案孰優(yōu)孰劣?最詳盡的分析來(lái)了~
文章出處:【微信號(hào):得捷電子DigiKey,微信公眾號(hào):得捷電子DigiKey】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
毫米波雷達(dá)與激光雷達(dá)比較 毫米波雷達(dá)在自動(dòng)駕駛中的作用
脈沖激光焊和連續(xù)激光焊怎么選?

ADS1298初始化成功完成后偶發(fā)出現(xiàn)連續(xù)讀出的數(shù)據(jù)全為0,為什么?
脈沖噪聲對(duì)系統(tǒng)的影響
FMU40-ARB2A4脈沖雷達(dá)物位計(jì)是電磁波還是機(jī)械波
pwm與spwm波,載波、參考波與輸出波形的關(guān)系
降壓斬波電路如何判斷電流是否連續(xù)
直流斬波電路的電流連續(xù)狀態(tài)是什么
常用的脈沖信號(hào)波形有哪些
連續(xù)波和脈沖波干擾的特點(diǎn)是什么
北斗雷達(dá)形變可視化監(jiān)測(cè)系統(tǒng)|干涉測(cè)量技術(shù)|線性調(diào)頻連續(xù)波
降壓斬波電路斷續(xù)與連續(xù)模式怎么判斷
降壓斬波電路電流連續(xù)的條件
超短波的連續(xù)波和疏密脈沖波的區(qū)別?
連續(xù)激光器中激光二極管的挑戰(zhàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論