") 剖析華為和博世L4級代客泊車系統(tǒng)
剖析華為和博世L4級代客泊車系統(tǒng)
博世與奔馳在2018年推出第一代全自動代客泊車AVP系統(tǒng),以場端為核心,第一代AVP系統(tǒng)在地面上部署了幾十個激光雷達,不僅成本高且施工與部署也不太方便。2020年中期,第二代AVP系統(tǒng)用立體雙目取代激光雷達,博世也在歐洲汽車電子雜志ATZ上發(fā)表文章Safety and Security Concept for an Automated Parking Service,強調(diào)新系統(tǒng)的安全性比激光雷達進一步提高,不過要花35歐元才能瀏覽文章,https://link.springer.com/article/10.1007/s38311-020-0327-5。同時博世、福特與底特律地產(chǎn)開發(fā)商Bedrock合作,在Bedrock開發(fā)的項目中部署其AVP系統(tǒng)。
無獨有偶,華為于2020年底也申請了以立體雙目為核心的AVP專利,申請公布日是2021年的3月30日。華為也是以場端為核心,基本不在車端做改動。
博世在斯圖加特機場的P6停車場部署了180個立體雙目攝像頭,同時搭建了一套服務(wù)器系統(tǒng),最終達到L4級的AVP。
上圖為斯圖加特機場平面圖,斯圖加特是德國第六大城市兼全國第四大城市聯(lián)合體(僅次于魯爾區(qū)、萊茵-美因區(qū)和柏林)。博世、奔馳和保時捷的總部都在斯圖加特。P6停車場尺寸未知,不過P14(公交停車場)的尺寸是確定的,那就是210米長,37米寬,推測P6停車場大約70米長,20米寬。
博世和奔馳合作提供AVP服務(wù),全程無人操作,包括付款。除了博世和奔馳外,還有一個重要合作伙伴就是Apcoa Parking,這是歐洲最大的停車場運營企業(yè),在13個國家9500個地點擁有150萬個停車位。Apcoa計劃將20%的停車位改造成AVP停車場。
福特、博世和Bedrock在底特律的Corktown打造了一座類似斯圖加特P6的AVP停車場,不過規(guī)模要大不少。
這是一座擁有450個車位,建筑面積15000平方米的立體車庫,實際除了這三家,還有一個合作伙伴Rich & Associates,停車庫的設(shè)計者。
具備WiFi的車輛到達AVP停車場門口時,車輛與停車場服務(wù)器經(jīng)手機確認連接,然后停車場服務(wù)器根據(jù)提前存儲的停車場地圖以及立體雙目攝像頭傳遞的車位信息為車輛規(guī)劃好停車路徑,服務(wù)器接管車輛按規(guī)劃好的停車路徑行進,如果探測到4米前有障礙物或行人就會自動剎停,服務(wù)器發(fā)送到車輛的路徑規(guī)劃命令刷新頻率大約5Hz。實際可以看做立體雙目攝像頭將整個停車場做了一個實時動態(tài)的3D數(shù)學模型,停車場服務(wù)器根據(jù)數(shù)學模型計算出可通行路徑與路徑規(guī)劃,而L4車輛是把服務(wù)器放在車上而已。
停車服務(wù)器有兩個,互相校驗備份,保證高可靠性。
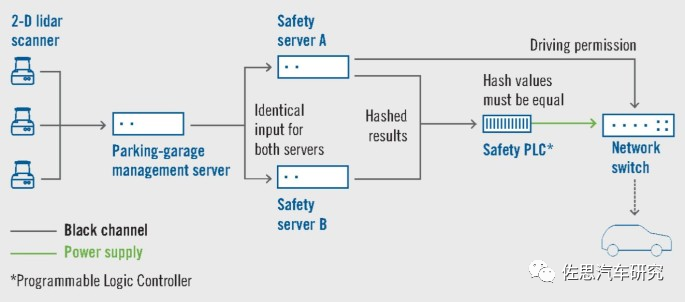
圖片來源:博世
上圖中的2D激光雷達已經(jīng)換成立體雙目。
博世天花頂立體雙目攝像頭特寫。據(jù)說停車場的空間使用率提高了20%。
這種設(shè)計需要架設(shè)停車場服務(wù)器,服務(wù)器的初始化技術(shù)含量比較高,成本也高。中國企業(yè)的做法一般是停車場服務(wù)器不搞那么復雜,停車場服務(wù)器提供車位信息,將車位信息發(fā)送到用戶手機,讓用戶選擇車位,可以提前預(yù)約車位,按華為的設(shè)想,車位預(yù)約后,地鎖自動升起。
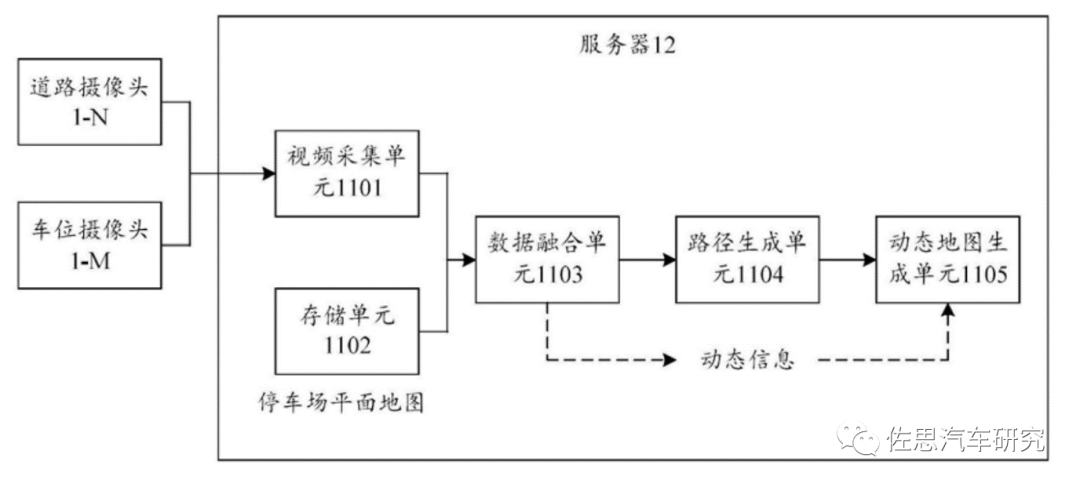
圖片來源:華為
華為的AVP自動泊車系統(tǒng)如上圖,華為的道路攝像頭是雙目,車位攝像頭可能是單目,只需要知道車位是否被占用就行。
為什么華為和博世還有大眾和福特要用雙目做AVP系統(tǒng)傳感器的核心,而不像特斯拉那樣用單目或三目。因為三點:一是立體雙目系統(tǒng)不需要識別就可探測障礙物信息;二是立體雙目能夠提供高可靠性的3D空間信息;三是立體雙目U-V視差能夠識別路面凸起變化。簡單來說就是立體雙目安全系數(shù)遠高于三目和單目。
以特斯拉為代表的單目和三目系統(tǒng),對深度學習高度依賴,深度學習視覺感知中目標分類與探測是一體的,無法分割。也就是說,如果無法將目標分類(也可以通俗地說是識別)就無法探測。換句話說,如果無法識別目標就認為目標不存在。車輛會認為前方無障礙物,會不減速直接撞上去。
訓練數(shù)據(jù)集無法完全覆蓋真實世界的全部目標,能覆蓋10%都已經(jīng)是很神奇的了,更何況現(xiàn)實世界時時刻刻都會出現(xiàn)新的不規(guī)則目標。特斯拉多次事故都是如此,比如在中國兩次在高速公路上追尾掃地車(第一次致人死亡),在美國多次追尾消防車。還有無法識別車輛側(cè)面(大部分數(shù)據(jù)集都只采集車輛尾部圖像而沒有車輛側(cè)面圖像)以及無法識別比較小的目標。毫米波雷達可能誤判,特別是靜止目標,如金屬井蓋、金屬天橋、金屬護欄,因此毫米波雷達會自動過濾掉靜止目標。此時需要雙目或激光雷達,這兩類傳感器都無需分類即可探測。
立體雙目的深度信息是通過三角測量法獲得的,在有效距離內(nèi),精度可達厘米級,誤差低于5%。當然,激光雷達在某些情況下會比立體雙目更好。單目也可以提供推測的深度信息,單目獲取深度信息有兩種:一種很簡單,深度學習訓練,深度學習幾乎是萬能的,什么地方都能用,但是深度學習是黑盒子,又可以叫調(diào)參的藝術(shù),可靠度和準確度很低,精度不會超過亞米級,誤差可能有50%,目前只在研究論文里出現(xiàn);第二種是SfM(Structure from Motion),需要至少2個攝像頭,運算量很大,可靠度和準確度比深度學習高很多,但跟立體雙目比還是差距很大,典型代表就是Mobileye用在吉利上的SuperVision。
Mobileye有關(guān)SfM的專利主要有三個,一個是2014年的Dense Structure from motion,另一個是2017年的Stereo Auto-Calibration From Structure-from-motion,還有一個是2020年的Comfort Responsibility Sensitivity Safety Model(長達197頁),其中雖未提及SfM具體算法,但描述了SfM Stereo Image的處理流程。最終Mobileye還是倒向激光雷達,如果FMCW激光雷達開發(fā)成功,SfM顯得性價比很低。
地下停車場通常都是有坡度的,單目和三目是無法識別路面的,特別是有坡度的路面更是完全無法檢測,因為它是純2D平面的傳感器,但立體雙目可以很輕松實現(xiàn)。奔馳的魔毯系統(tǒng)就是用立體雙目檢測道路起伏,提前讓懸掛系統(tǒng)做出調(diào)整,也是唯一真正的自適應(yīng)懸掛。
雙目除了常用的視差圖還有一個U-V視差。它是在原始視差圖上延伸出來的。
上圖為典型的U-V視差圖。U-V視差圖可以判斷路面以及建筑物,準確度遠高于深度學習的方法。
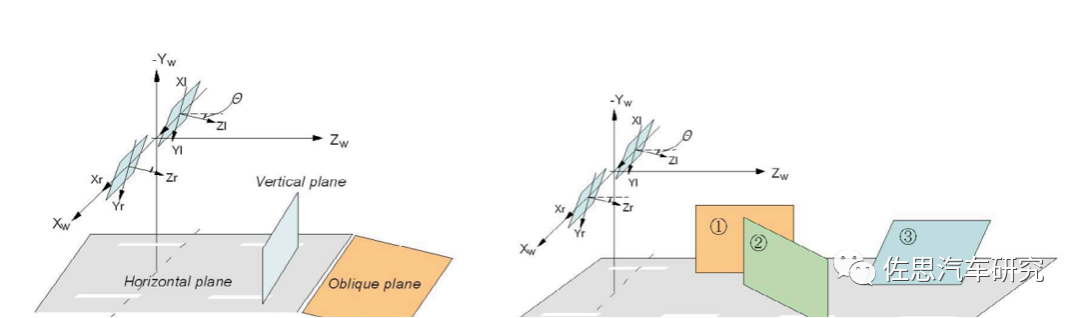
圖片來源:博世
U-V視差也是自動駕駛可行駛空間的關(guān)鍵,是導出路面的關(guān)鍵。
博世和華為的系統(tǒng)對車輛要求都不高,包括線控制動,電動助力轉(zhuǎn)向大部分車輛都配備,只有EPB (電子駐車系統(tǒng)),國產(chǎn)車普及率不高,實際就是一套小功率的輪轂內(nèi)電磁制動系統(tǒng)。國產(chǎn)車有些是電子手剎,只是用電機代替了手扳。
華為依仗龐大的手機族群,又在基礎(chǔ)設(shè)施領(lǐng)域耕耘多年,IoT方面具備絕對優(yōu)勢,在AVP方面優(yōu)勢很大,博世則在與車企合作方面優(yōu)勢非常明顯。不過在中國,開發(fā)商或停車場業(yè)主才是有決定權(quán)的一方。
編輯:jq
-
華為
+關(guān)注
關(guān)注
216文章
34473瀏覽量
252026 -
服務(wù)器
+關(guān)注
關(guān)注
12文章
9218瀏覽量
85586 -
激光雷達
+關(guān)注
關(guān)注
968文章
3983瀏覽量
190051 -
深度學習
+關(guān)注
關(guān)注
73文章
5506瀏覽量
121258
原文標題:華為和博世L4級代客泊車系統(tǒng)剖析:立體雙目為核心
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
伊予鐵巴士公司啟動L4級自動駕駛公交商業(yè)運營
當春節(jié)駕車返鄉(xiāng)擁有了L3/L4級自動駕駛
l4級別自動駕駛的特點是什么
經(jīng)緯恒潤全冗余R-EPS助力L4級自動駕駛落地

L4算法公司如何助力城市NOA加速落地?
Mobileye引領(lǐng)自動駕駛新紀元:L4級無人駕駛系統(tǒng)在德國成功路測
百度發(fā)布全球首個L4級自動駕駛大模型
百度發(fā)布全球首個L4級自動駕駛大模型Apollo ADFM
L0與L4雙機采用SPI DMA循環(huán)模式通信過程中,L4接收數(shù)據(jù)錯位了的原因?
華為提出業(yè)界首個L4級AI安全智能體,邁入智能防御新時代
華為Net Master+高清網(wǎng)絡(luò)數(shù)字地圖,加速邁向L4自智網(wǎng)絡(luò)
NVIDIA和昊鉑宣布雙方將合作量產(chǎn)L4級自動駕駛汽車






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論