 協作機器人與工業機器人必然殊途同歸
協作機器人與工業機器人必然殊途同歸
協作機器人現在還是很火!這是廢話,不談了。 從協作機器人面世開始,關于協作機器人是否會取代工業機器人的討論一直未停過。
我的理解是,協作機器人處于發展的初級階段,市場規模逐年擴大,但還處于向工業機器人“虎口奪食”的狀態,現在談協作機器人要把工業機器人“滅了”只能說“風口上的豬,吹著吹著飄了”。
協作機器人的定義是指被設計成可以在協作區域內與人直接進行交互的機器人,可以理解為共享工作空間與協同作業,核心是安全。當前協作機器人對安全的主流設計采用的是降速與碰撞檢測。
試想如果工業機器人有額外的技術使其變得安全,那工業機器人與協作機器人之間其實就不會像是看著“粗壯的、跑得快的”是工業機器人,而“長得像UR的”就被認為是協作機器人,當前技術水平的限制使得現有的工業機器人與協作機器人界線分明,而隨著技術的發展,協作機器人與工業機器人必然殊途同歸。
事實上,“超界者”已經出現了。
ABB最新發布的CRB 1100就是一個典型的例子。從外形上看,CRB 1100跟IRB 1100 差別不大,只不過是增加了一個激光掃描儀,通過感知人體與機器人的距離來調整機器人的工作狀態,以此達到安全目的。這樣的CRB 1100就成為了“合理合法”的協作機器人,同時保留了工業機器人的高速、高精度。
協作機器人也有向工業機器人性能靠攏的明顯趨勢,負載上,從最開始的UR3、UR5、UR10,現在已經往12KG、15KG、20KG、30KG等更高負載發展;精度上,從最初的0.1mm開始慢慢變成0.05mm、0.03mm、0.02mm;速度上,從1m/s變成1.5m/s、3m/s…… 這一切都在說明,工業機器人與協作機器人正在發生融合,最終所有機器人都應該具備安全特性,只是針對不同的應用場景,機器人的形態不同而已。
我不同意協作機器人這個“后浪”會把工業機器人這個“前浪”拍死在沙灘上,但我認為工業機器人最終必然會消失。而打敗工業機器人的不是協作協作機器人,而是時代。
工業機器人的產生背景是規模化、精細化生產。把一個產品分散成模塊化組件,組件再分解為標準化零件,把生產工藝切割成若干個標準化流程,這是工業機器人最擅長的。
然而,一方面個性化的需求越來越多,限量版、定制版越來越受歡迎,當技術上去了,成本下來了,“奢侈品”規模化生產的需求就會大大減弱;另一方面,讓我們開一下腦洞,如果對產品的分解突破原材料將發生什么?
如果有一天,我們對物質的成型不再止于原材料,而是可以控制構成一切物質的基本粒子——原子的話,那生產方式就可以實現一步到位。3D打印是我能想到的最接近的描述。
當前的3D打印是塑料,正在發展的3D打印是金屬,那么如果被打印的是原子,是不是就變成萬物皆可打印了?
聽起來似乎很遙遠,但也不是不可能。所以說當時代變了,生產方式發生本質的改變,游戲規則變了,協作機器人與工業機器人之間重疊部分也必將消失,只有特定的應用場景被保留下來。
本體之變
想象一下,協作機器人后續可能會發生什么變化? 首先是本體。其實協作機器人可以看作是工業機器人向模塊化、集成化、安全化探索下的產物。
兩者都離不開電機、減速機、編碼器、驅動器、控制器,只是原來在工業機器人中,這些零部件在各家的設計中擺放各不相同,而協作機器人巧妙地把這些集成到一個關節模組中,通過大小不同、數量不一的模組,加上不同形狀的連桿,就成了不同的機器人。
以下圖的6軸工業機器人為例,6個關節中12346采用電機與減速機直連,5軸采用同步帶傳動的方式把電機往后面放(這是比較簡單的方式,還有其他各種復雜的設計就不一一列出),外面再連接一個電控柜,電控柜主要零部件是6個驅動器與1個控制卡(其他輔助的暫忽略)。
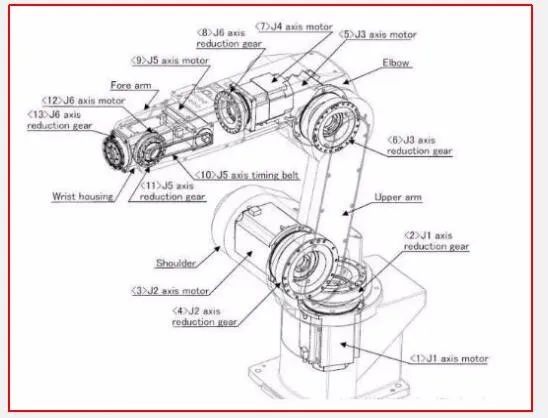
再看協作機器人:
1、把同步帶傳動去掉,把額外的齒輪傳送去掉,只保留電機與減速機直連的方式。
2、把1個電機編碼器分成2個編碼器分別分布在輸入端與輸出端,把電池省掉了。
3、電機去掉外殼,與減速機集成到一起。
4、由于電機采用低壓,驅動器可以做得很小,于是驅動器從控制柜就拉出來,與電機集成到一起分布到各個關節中。
正在發生和未來將發生的“本體之變”如何?
1、模組的規格會進一步拓展。
按照諧波減速器的規格,目前模組擁有14、17、20、25、32這5種規格,覆蓋目前從1kg到20kg負載的機器人規格。隨著協作機器人向大負載發展, 32的諧波已經不能滿足需求,再往上就是40諧波、50諧波或者RV減速機才能滿足需求。而往小了走,可能會出現比14還小的諧波,或者非金屬減速機以達到小型輕量的目的。
2、力傳感器會“消失”。
目前的協作機器人設計大部分采用的是電流反饋做力控,沒有配置力傳感器。而高端玩家是在輸出端增加了力傳感器,這一步其實相當艱難,力傳感器的設計調試都相當困難,算法我們先不談,光是力傳感器本身的制造工藝性、可靠性、維護性目前都是一大瓶頸,價格還很高昂。而在未來,力傳感器必然會流行起來甚至變成標配,最終則會“消失”,與減速機融為一體。于是,各家在機械部分的差距會縮小,算法將是制勝關鍵。
3、減速機最終會消失,是真的消失。
減速機的作用顧名思義是減速增力,是因為在當前的技術限制下,伺服電機的力矩密度太小,在功率相同的情況下,把速度降下來,就可以把力矩提升上去。
未來很可能直驅電機會代替電機+減速機的組合,早在20多年前,Adept就有直驅版SCARA——AdeptOne,只是到現在為止還是卡在直驅電機的體積、重量、控制上未能有明顯突破。假設直驅能做得夠小,同步帶傳動、齒輪傳動也會消失,一個直驅電機就是一個關節,并且由于沒了減速機的緩沖,外部力直接反饋到電機,力傳感器也不用了。
屆時。所謂工業機器人與協作機器人,只不過是直驅電機以何種外殼與連桿包覆而已。
4、控制柜也會“消失”。
控制柜這個“累贅”是早在20多年前的大神們就想踢掉的,各類研究與樣機不斷,只是苦于各種客觀因素一直未有真正量產的產品出來。國產中直到2013年李群在DELTA機器人中率先把控制器放到了DELTA的基座中,再往后ABB、EPSON也相繼有無控制柜的產品面世。
在無控制柜的路上,當前主要有兩個方向,一個是“驅控一體”,把驅動器與控制器融為一體,并且高度集成,小到可以放到機器人底座里;另一個就是現在協作機器人在做的,采用低壓驅動,把驅動器打散跟電機集成到一起。
最終控制器是否也會打散分布到各個關節當中呢?這樣一來,就變成每一個關節都是一個獨立的機器人,一臺機器人就變成了若干個機器人的協同合作。這在現在的技術水平下已經可以實現,只是受限于體積與成本,只在實驗室看到過這樣的概念機,但是相信在不久的將來會有這樣的產品出現。
5、線纜會逐步減少乃至消失。
傳統工業機器人的做法是把所有的線纜從各個關節引到基座,然后基座與電控之間再由一根或兩根很粗的線纜連接。李群的做法是把電控柜放到了基座里,這樣外部的線纜就沒了,但是各個關節的線纜還是需要引到基座,而UR的做法是把驅動打散分到各個關節,這樣各個關節形成串聯的形式,大大減少了線纜數量。
關節與關節之間的線纜主要是通訊與供電。 假設未來無線通訊足夠強大,比如從5G發展到50G,足夠快,足夠安全的時候,各關節之間完全可以使用無線傳輸信號。而供電方面,現在無線供電已經在照明、傳感器等領域有產品出現,轉到機器人上只是時間問題。
人機交互之變
協作機器人定義的兩個重點是共享空間與協同作業。共享空間現在已經做到了,但還有很大的改善空間,而協同作業,現在還只是開了個頭而已。
首先,共享空間的前提是安全,現在的安全策略還停留在被動防御上。以UR為典型,安全策略是速度慢,一旦人體碰到,機器人會馬上停止運動,最大限度減少傷害。而以KUKA iiwa為典型的是增加力傳感器,進一步增加力反饋的及時性與準確性。
再有就是在碰撞檢測的基礎上包一層緩沖材料,甚至緩沖材料本身也是一種傳感器,提供緩沖的同時,也可以檢測到接觸并馬上停止。
以上都是接觸式防御,現在市場上也出現了“非接觸式”的防御。如越疆科技的電子皮膚,在人體接近機器人時,機器人停止動作甚至主動避障;也有ABB的CRB 1100,當人處于機器人工作空間外的時候就已經開始監測,按人體離機器人的距離來決定機器人的動作。
以上防御都切實有效,但都各有漏洞,要么是離機器人很近才被感知到,要么是把人體當成一個質點來監測整體距離。目前國外的實驗室也有在研究采用視覺監測人體的動作來更靈活地進行防御。
第二,協同作業方面,要么就是人與機器人在同一個工作空間,你干你的,我做我的;要么通過一些標準的信號交互,比如放在指定位置并通過IO的方式告訴機器人,或者機器人定期去固定的位置檢測是否有指定的物體出現。
可以預測,在未來的機器人系統中,人體的肢體運動也受到實時監測,大到人體走動,小到人體伸出一個手指的動作都被系統捕捉到,機器人就可以預判人體的動作并做出相應的反應。
那么,要做到上述效果需要怎樣的功能支持? 首先是視覺與機器人的集成,機器人不再是被動的在指定地點搜尋,而是“眼觀四路、耳聽八方”,只要進入視野內的物體都可以被捕捉到,所見即所得。
其次就是強大的智能圖像處理能力,能自行搜尋所需目標。比如協作機器人+AGV的組合做物料的轉運,當物料擺放位置隨意時,機器人就可以采用搜尋動作,而不是拍個照看一下,再調整位置,再拍個圖看一下。自動駕駛、人形機器人、大小狗也是如此。
再次,人機交互方面,從工業機器人的指令編程,到協作機器人的圖形化編程,編程會越來越簡單,代碼會越來越少。
近期,大族機器人也發布了一個視頻DEMO,人機交互變成了語音編程,相信當前的語音編程與早期的智能音箱相似,都是通過提取語言中的關鍵詞來變成指令。而隨著語音識別與人工智能的發展,語音編程必然流行起來。并且,如果更人性化一點,通過與某個人的長期合作,機器人也許可以通過合作者的面部反應給出相應的反饋以完成合作。
如果再往遠了想,當腦機技術成熟時,那人機交互更是一切盡在不言中。不過,是腦機技術先出來,還是開頭的萬物皆可打印先出來,誰知道呢。
最后說兩句
協作之火,頗有燎原之勢,但這并非毀滅之火,而是新生之火,最終促進的是機器人這一整個大的品類往安全化、模塊化、智能化發展。未來的機器人,不管是否存在協同作業,都必然是安全的機器人。 而對國產機器人來說,不管是工業機器人還是協作機器人,我們仍處于起步階段,小步快走,利用近水樓臺的產業優勢逐步縮小差距才是正途!
責任編輯:lq
-
工業機器人
+關注
關注
91文章
3365瀏覽量
92664 -
協作機器人
+關注
關注
2文章
490瀏覽量
30146 -
3D打印
+關注
關注
26文章
3549瀏覽量
109116
原文標題:“協作”在左,“工業”在右
文章出處:【微信號:gaogongrobot,微信公眾號:高工機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
MiR推出MC600移動協作機器人
優傲機器人升級高負載協作機器人,助力客戶生產效率飛躍
工業機器人常用的編程方式
Al大模型機器人
abb工業機器人的編程語言是什么
泰科機器人攜新款行星滾柱絲杠線性關節模組和雙臂協作機器人亮相2024年ITES深圳工業展

PCB行業:用協作機器人,就選大族機器人
什么是協作機器人?為什么使用協作機器人?





 工商網監
工商網監
評論