") 通過(guò)嵌入式運(yùn)動(dòng)控制加速創(chuàng)新
通過(guò)嵌入式運(yùn)動(dòng)控制加速創(chuàng)新
嵌入式運(yùn)動(dòng)控制器減少了算法開(kāi)發(fā)、實(shí)施和測(cè)試的多個(gè)周期,以設(shè)置一些參數(shù)并將代碼導(dǎo)出到您自己的固件。
自動(dòng)駕駛汽車(chē)、先進(jìn)的 3D 打印機(jī)和下一代“智能”假肢有什么共同點(diǎn)?他們都是嵌入式運(yùn)動(dòng)控制技術(shù)出現(xiàn)的受益者(另見(jiàn)“推動(dòng)嵌入式運(yùn)動(dòng)控制的三大趨勢(shì)”)。這些系統(tǒng)將特定應(yīng)用的運(yùn)動(dòng)控制芯片與開(kāi)放的硬件和軟件平臺(tái)配對(duì),是第四次工業(yè)革命的一部分,這一趨勢(shì)正在加快機(jī)器人、工業(yè)自動(dòng)化甚至使用機(jī)電技術(shù)的消費(fèi)產(chǎn)品的創(chuàng)新速度.
這類新型設(shè)備通過(guò)將最基本的控制功能“封裝”為硬件邏輯或經(jīng)過(guò)驗(yàn)證的軟件構(gòu)建塊,嵌入式開(kāi)發(fā)人員可以使用與傳統(tǒng)應(yīng)用程序相同的豐富工具集和代碼庫(kù)來(lái)處理這些功能,從而簡(jiǎn)化了機(jī)電一體化產(chǎn)品的開(kāi)發(fā)。除了顯著縮短開(kāi)發(fā)周期外,嵌入式運(yùn)動(dòng)控制器還可以為現(xiàn)有產(chǎn)品添加新功能,同時(shí)也促進(jìn)了許多新產(chǎn)品類別的出現(xiàn)。
智能世界的智能電機(jī)
嵌入式運(yùn)動(dòng)控制器幾乎可以將任何電機(jī)變成“智能電機(jī)”,從而使設(shè)計(jì)人員能夠輕松且經(jīng)濟(jì)高效地創(chuàng)建具有更高性能、效率以及在某些情況下具有全新功能的產(chǎn)品. 其中一些包括以下內(nèi)容:
-
高級(jí)漸變(也稱為“S 形漸變”):本視頻中展示的奇特“啤酒移動(dòng)器”說(shuō)明了如何使用加速整形1在兩點(diǎn)之間快速移動(dòng)整杯,而不會(huì)濺出一滴珍貴的水滴。相同的原理可以應(yīng)用于醫(yī)學(xué)研究或任何其他液體處理應(yīng)用中使用的移液機(jī)器人。類似地,不斷調(diào)整機(jī)械臂的加速和減速率使其能夠達(dá)到更高的速度,并且仍然準(zhǔn)確地到達(dá)其下一個(gè)位置,而對(duì)其有效載荷的干擾最小。這些算法還可以幫助工業(yè)材料運(yùn)輸商快速高效地移動(dòng)重型有效載荷。
-
磁場(chǎng)定向電機(jī)控制(也稱為“矢量控制”):一種通過(guò)實(shí)時(shí)計(jì)算輸送到其定子的驅(qū)動(dòng)電流的相位和幅度來(lái)以峰值效率運(yùn)行電機(jī)的技術(shù)。該算法廣為人知并廣泛用于大型電機(jī),但它可以在電動(dòng)自行車(chē)、電動(dòng)工具和其他消費(fèi)類應(yīng)用中提供更長(zhǎng)的電池壽命、更低的運(yùn)行溫度以及其他優(yōu)勢(shì)。
-
更智能的步進(jìn)電機(jī):步進(jìn)電機(jī)價(jià)格便宜且易于使用,但在精度和精度方面存在局限性;此外,它們還受到操作噪音的影響。這些問(wèn)題可以通過(guò)啟用微步進(jìn)的智能控制算法來(lái)克服,從而使它們能夠像更昂貴的伺服電機(jī)一樣運(yùn)行;此外,通過(guò)塑造它們的驅(qū)動(dòng)脈沖來(lái)產(chǎn)生更平滑、更安靜的步驟。
直到最近,這些類型的功能都過(guò)于復(fù)雜,無(wú)法在許多商業(yè)和消費(fèi)產(chǎn)品中實(shí)現(xiàn)。然而,這種情況正在改變,因?yàn)檫\(yùn)動(dòng)控制受益于同樣的“硅革命”,幫助計(jì)算機(jī)從 1960 年代的早期大型機(jī)發(fā)展到今天功能強(qiáng)大且價(jià)格合理的 PC。
從大型機(jī)到大眾市場(chǎng)
最初由高端工作站和定制電子設(shè)備機(jī)架驅(qū)動(dòng),早期的運(yùn)動(dòng)控制系統(tǒng)體積龐大且價(jià)格昂貴。這些早期系統(tǒng)憑借獨(dú)特的功能(例如可變加速度和負(fù)載感應(yīng))迅速證明了其高昂的價(jià)格是合理的,這些功能為制造和其他工業(yè)自動(dòng)化應(yīng)用帶來(lái)了新的精度、靈活性和生產(chǎn)力水平。
在接下來(lái)的十年中,日益強(qiáng)大的數(shù)字信號(hào)處理器 (DSP) 和更大的低成本現(xiàn)場(chǎng)可編程門(mén)陣列 (FPGA) 使運(yùn)行復(fù)雜算法的控制器的成本大幅降低,這些算法對(duì)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)以及電機(jī)控制進(jìn)行建模需要以精確的方式移動(dòng)它的信號(hào)。盡管如此,該技術(shù)的采用仍然受到創(chuàng)建應(yīng)用軟件所需的時(shí)間和專業(yè)知識(shí)的限制。存在用于運(yùn)動(dòng)控制的可重用 DSP 和 FPGA 代碼庫(kù),但它們通常被設(shè)備制造商牢牢掌握。此外,大部分代碼沒(méi)有遵循現(xiàn)代可重用性準(zhǔn)則,因此仍然需要許多人月——即使對(duì)于有經(jīng)驗(yàn)的開(kāi)發(fā)人員——來(lái)(重新)實(shí)現(xiàn)每個(gè)應(yīng)用程序。
嵌入式運(yùn)動(dòng)控制器已經(jīng)克服了軟件障礙。這些單芯片器件集成了強(qiáng)大的處理器內(nèi)核和專門(mén)設(shè)計(jì)用于加速運(yùn)動(dòng)控制算法的專用硬件邏輯。由于大多數(shù)嵌入式開(kāi)發(fā)人員都不是運(yùn)動(dòng)學(xué)或電機(jī)物理方面的專家,因此這些設(shè)備帶有一個(gè)電機(jī)控制和運(yùn)動(dòng)控制功能庫(kù),可以通過(guò)標(biāo)準(zhǔn)應(yīng)用程序編程接口 (API) 訪問(wèn)這些功能庫(kù)。這種方法允許設(shè)計(jì)人員為他們的 3D 打印機(jī)、真空清潔機(jī)器人或生物分析儀提供高級(jí)功能——例如加速整形、微步進(jìn)和步進(jìn)噪聲抑制——而無(wú)需成為運(yùn)動(dòng)物理專家。
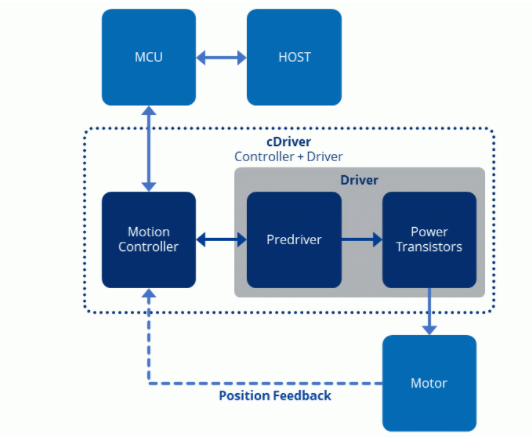
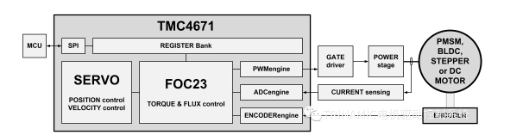
圖 2:越來(lái)越多的運(yùn)動(dòng)控制功能被簡(jiǎn)化為單芯片解決方案,例如 TRINAMIC 將運(yùn)動(dòng)控制器和電機(jī)驅(qū)動(dòng)器集成到 cDriver 中。(來(lái)源:TRINAMIC)
大膽的開(kāi)發(fā)周期
嵌入式運(yùn)動(dòng)控制器進(jìn)一步簡(jiǎn)化了開(kāi)發(fā)周期,因?yàn)?(a) 它們的開(kāi)發(fā)平臺(tái)通常設(shè)計(jì)為與許多常用于傳統(tǒng)嵌入式系統(tǒng)的軟件工具兼容,以及 (b) 因?yàn)橛写罅康拈_(kāi)源參考代碼庫(kù)他們支持。因此,開(kāi)發(fā)人員可以從現(xiàn)有的 Java、C/C+/C# 和 Linux 代碼庫(kù)構(gòu)建其運(yùn)動(dòng)控制應(yīng)用程序的基礎(chǔ),并將大部分精力集中在 5% 到 10% 的代碼上他們的設(shè)計(jì)。
由于嵌入式運(yùn)動(dòng)控制器將其關(guān)鍵功能封裝在預(yù)先驗(yàn)證的芯片和軟件中,這部分開(kāi)發(fā)周期從算法開(kāi)發(fā)、實(shí)施和測(cè)試的多個(gè)周期減少到設(shè)置幾個(gè)參數(shù)并將代碼導(dǎo)出到您自己的固件。因此,生物測(cè)定移液機(jī)器人或高速部分控制食品分配器的開(kāi)發(fā)工作流程與非機(jī)電嵌入式應(yīng)用的開(kāi)發(fā)流程沒(méi)有太大區(qū)別。
從胡克船長(zhǎng)到鋼鐵俠:真實(shí)世界的成功故事
先進(jìn)假腿的最新發(fā)展提供了一個(gè)生動(dòng)的現(xiàn)實(shí)例子,說(shuō)明嵌入式運(yùn)動(dòng)控制器如何加速創(chuàng)新機(jī)電產(chǎn)品的開(kāi)發(fā)。2冰島制造商 ?ssur 是主動(dòng)假肢技術(shù)的市場(chǎng)領(lǐng)導(dǎo)者,開(kāi)發(fā)了第一個(gè)批量生產(chǎn)的假肢腿,該假肢腿具有電動(dòng)膝關(guān)節(jié)和踝關(guān)節(jié)。它在 2016 年 Cybathlon 3 上首次亮相,這是一項(xiàng)由蘇黎世聯(lián)邦理工學(xué)院組織的國(guó)際比賽,其中殘疾選手使用最先進(jìn)的輔助技術(shù)——如機(jī)器人假肢、腦機(jī)接口和動(dòng)力外骨骼——來(lái)完成日常生活任務(wù)。
該項(xiàng)目的目的是創(chuàng)造一種新型假肢,以栩栩如生的方式移動(dòng),并為用戶提供舒適、踏實(shí)和機(jī)車(chē)效率。肢體的兩個(gè)動(dòng)力關(guān)節(jié)都依賴于由TRINAMIC Motion Control 4開(kāi)發(fā)的嵌入式運(yùn)動(dòng)控制器來(lái)生成復(fù)雜的運(yùn)動(dòng),并最有效地利用肢體的有限電池容量。
控制器豐富的硬件運(yùn)動(dòng)控制功能和開(kāi)發(fā)平臺(tái)的經(jīng)過(guò)驗(yàn)證的應(yīng)用軟件的補(bǔ)充消除了與控制器固件開(kāi)發(fā)相關(guān)的許多風(fēng)險(xiǎn),并縮短了驗(yàn)證和測(cè)試通常所需的時(shí)間。控制參數(shù)只需根據(jù)電機(jī)和設(shè)備應(yīng)用的獨(dú)特要求進(jìn)行調(diào)整。
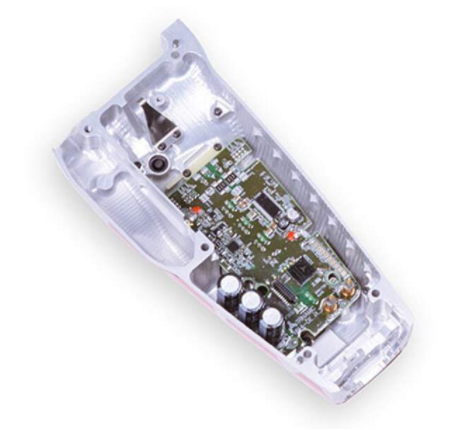
圖 4:通過(guò)專業(yè)地對(duì)齊嵌入式運(yùn)動(dòng)控制,進(jìn)一步小型化允許具有自定義外形的強(qiáng)大 PCB,例如 ?ssur 的 POWER KNEE 中使用的 PCB。(來(lái)源:TRINAMIC)
消除了通常與運(yùn)動(dòng)控制開(kāi)發(fā)相關(guān)的許多步驟,使設(shè)計(jì)團(tuán)隊(duì)能夠在短短五個(gè)月內(nèi)創(chuàng)建、調(diào)試和驗(yàn)證肢體定制電機(jī)控制器系統(tǒng)的功能。這有助于按時(shí)按時(shí)完成雄心勃勃的開(kāi)發(fā)計(jì)劃,以成功參加 2016 年在蘇黎世舉行的 Cybathlon(觀看參考文獻(xiàn) 5 中的 YouTube 視頻,了解 Power Knee 的運(yùn)行情況)。雖然 Power Knee 的快速上市時(shí)間將意味著 ?ssur 獲得更大的利潤(rùn),但這項(xiàng)新技術(shù)創(chuàng)造的真正財(cái)富是它將為用戶提供的自由和性能。
-
嵌入式
+關(guān)注
關(guān)注
5082文章
19123瀏覽量
305153 -
智能電機(jī)
+關(guān)注
關(guān)注
1文章
24瀏覽量
11315 -
矢量控制
+關(guān)注
關(guān)注
2文章
284瀏覽量
32220
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
嵌入式運(yùn)動(dòng)控制器的優(yōu)缺點(diǎn)
如何利用ARM+PCL6045B設(shè)計(jì)嵌入式運(yùn)動(dòng)控制器?
如何通過(guò)LabVIEW FPGA加速嵌入式系統(tǒng)原型化?
基于OMAP平臺(tái)的嵌入式運(yùn)動(dòng)控制器設(shè)計(jì)資料分享
嵌入式同步運(yùn)動(dòng)控制器在飛剪系統(tǒng)中的應(yīng)用
基于ARM芯片的嵌入式運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
基于嵌入式運(yùn)動(dòng)控制器系統(tǒng)的設(shè)計(jì)與開(kāi)發(fā)
ARM與PCL6045B的嵌入式運(yùn)動(dòng)控制器設(shè)計(jì)
GUS系列嵌入式運(yùn)動(dòng)控制器規(guī)格及尺寸圖

基于ARM與DSP的嵌入式運(yùn)動(dòng)控制器設(shè)計(jì)詳解

嵌入式運(yùn)動(dòng)控制器設(shè)計(jì)
嵌入式運(yùn)動(dòng)控制模塊設(shè)計(jì)
嵌入式運(yùn)動(dòng)控制器發(fā)展中的優(yōu)缺點(diǎn)分析
什么是嵌入式運(yùn)動(dòng)控制





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論