 分析RTOS實現多任務調度的基本原理
分析RTOS實現多任務調度的基本原理
很多朋友長時間使用裸機編程,切換過來學習RTOS,就對其中很多概念產生誤解。
大部分人開始學習RTOS實時操作系統時,對RTOS中的一些概念都不太理解。
一上來就是臨界段、調度、信號量、互斥鎖等這些概念,相信大部分初學者都是懵的。
不太懂這些概念很正常,一下子懂了,我倒反而覺得不正常。
1什么是多任務
這里大部分人應該都是從裸機階段過來的,裸機系統一般也稱之為單任務系統、輪詢系統或前后臺系統。
這個概念相信大家都能明白,輪詢就是在一個大while循環里執行。前后臺系統就是在執行while時,有中斷(前臺)響應的系統。
int main(void){ /* 初始化 */ while(1) { /* 循環處理多項事情 */ }}
那么,什么是多任務呢?
當多任務操作系統使用某種任務調度策略允許兩個或更多進程并發共享一個處理器時,事實上處理器在某一時刻只會給一件任務提供服務。
因為任務調度機制保證不同任務之間的切換速度十分迅速,因此給人多個任務同時運行的錯覺。
---來自百度百科
初學者可以理解為:有類似上面的多個輪詢系統。
如下代碼,將大while中的多項事情,分為幾個事情,分別處理。
void Task1(void){ /* 初始化 */ while(1) { /* 處理事情1 */ }}
void Task2(void){ /* 初始化 */ while(1) { /* 處理事情2 */ }}
這里就要牽涉到各個任務之間的切換:任務調度。
2任務調度
說任務調度之前,先說一插曲:
我開始學RTOS時,覺得CPU這么短時間(1ms)在各個任務之間來回切換,而且切換還需要執行那么多代碼,這樣CPU還能執行多少代碼啊?
其實,我當時太低估了處理器的能力。
拿STM32F103跑72M來說,1ms時間可以執行的代碼有多少,你們心里有概念嗎?
沿著這個問題,大家進一步思考其實都能明白,區區那切換(任務調度)的幾行代碼對于CPU速度來說,這個處理時間可以忽略不計(當然,這是相對高速處理而言。如果低頻的處理器,這個時間可能相對較長)。
任務調度
任務調度可以分搶占調度和輪詢調度。
在RTOS中,為了使任務得到實時響應,一般使用搶占調度方式,我們拿UCOS為例:
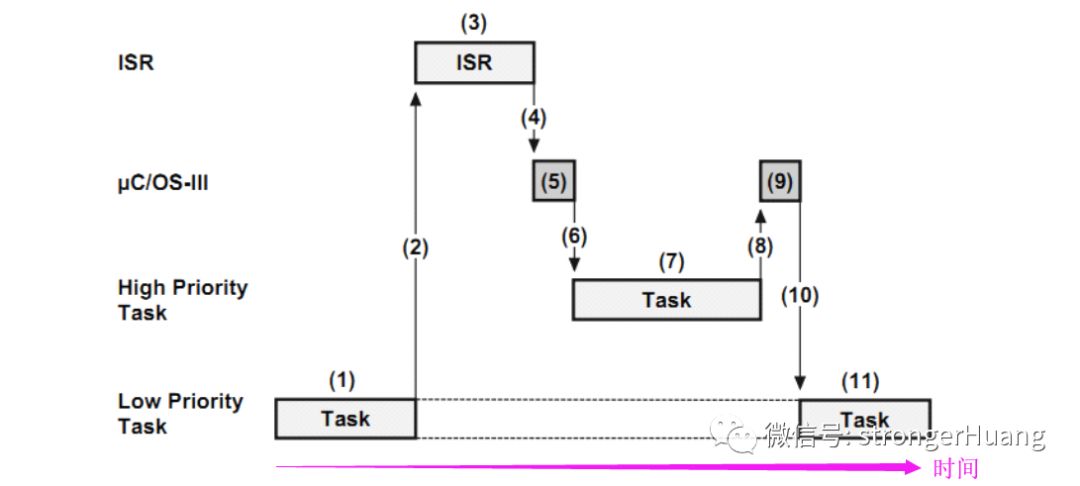
你會發現只程序執行過程中,如果有高優先級任務帶來,高優先級任務就會打斷低優先級任務。
直到高優先級任務執行完,低優先級任務才得到相應。
這里有人可能會問:如果高優先級一直或長時間執行可以嗎?
答案是:NO
這里就關系到任務優先級分配,以及任務設計問題。
一般來說,高優先級任務是在等待一個事件的觸發,執行一件緊急,而不會太耗時的事情。
太耗時任務一般留給低優先級任務,在系統不忙時慢慢處理。
調度過程
我們設置系統滴答為1ms時間,那么系統就會間隔1ms檢查一次就緒任務中優先級更高的任務。
這個1ms滴答是由定時器中斷產生,一般像在STM32由內核滴答定時器產生。
如上圖,他在(2)的位置就檢測到有更高優先級任務(7)就緒,此時就會跳轉到任務(7)去執行。
編輯:jq
-
RTOS
+關注
關注
22文章
814瀏覽量
119677
原文標題:RTOS實現多任務調度的基本原理
文章出處:【微信號:strongerHuang,微信公眾號:strongerHuang】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
STM32 簡單多任務調度
STM32 簡單多任務調度的方法與程序例程
RTOS的多任務同步和通訊
在STM32下完成FreeRTOS的多任務程序開發
實時多任務操作系統(RTOS)
RTOS中的多任務切換的相關資料分享
如何去實現一種基于ARM9的多任務搶占式調度器設計
STM32 簡單多任務調度的方法與程序例程






 工商網監
工商網監
評論