") 抬頭顯示技術(shù)(HUD)怎么改變駕駛體驗(yàn)
抬頭顯示技術(shù)(HUD)怎么改變駕駛體驗(yàn)
抬頭顯示技術(shù)(HUD)是創(chuàng)造更好駕駛體驗(yàn)的一個(gè)發(fā)展方向,它們可以通過在駕駛員擋風(fēng)玻璃上顯示關(guān)鍵信息和功能來幫助改善汽車設(shè)計(jì),從而提高駕駛員的態(tài)勢(shì)感知能力。 例如,在駕駛員的視線中顯示汽車的速度可以減少眼睛離開路面的時(shí)間。
而當(dāng)與傳感器和先進(jìn)的駕駛員輔助系統(tǒng)(ADAS)的能力相結(jié)合時(shí),HUD技術(shù)也能使駕駛員更容易地檢測(cè)到威脅或警告,這樣他們就能更快地采取行動(dòng)。例如,駕駛員可以看到一個(gè)突出顯示真實(shí)物體(如行人或路障)的圖形,而不是僅在車內(nèi)設(shè)置紅色閃爍燈或警報(bào)。
HUD系統(tǒng)的設(shè)計(jì)開始脫離傳統(tǒng)的顯示技術(shù),即使用薄膜晶體管(TFT)面板,而是采用增強(qiáng)現(xiàn)實(shí)(AR)技術(shù),將圖像顯示在司機(jī)前方更遠(yuǎn)的地方,在他們的自然視線范圍內(nèi)。這種投影還允許這些圖像代表真實(shí)世界,并提供更多有用的信息,比如導(dǎo)航、危險(xiǎn)識(shí)別等等。 AR HUD 雖然傳統(tǒng)的HUD系統(tǒng)確實(shí)具有先進(jìn)的汽車顯示技術(shù),但它們?nèi)杂芯窒扌浴@纾麄儚鸟{駛員的有利位置提供一個(gè)小視野(FoV)。
投影圖像的空間很小 - 大約5到7個(gè)水平度 ,并且通常在駕駛員前方顯示2到3米的地方,這使得圖像靠近汽車的前保險(xiǎn)杠附近。這種有限的FoV限制了可以顯示的圖像類型以及這些圖像可以出現(xiàn)在駕駛員視圖中的位置。 另外,有限的虛擬圖像距離(VID)難以將圖形對(duì)準(zhǔn)或覆蓋到真實(shí)對(duì)象上。因此,傳統(tǒng)HUD上顯示的信息主要與駕駛員座位上其他地方可見的信息重復(fù),并且沒有添加其他功能。
AR HUD通過較長的VID減少了重新調(diào)節(jié)時(shí)間 - 從使用傳統(tǒng)HUD約2米到使用AR HUD的7,10甚至20米 - 這意味著駕駛員的眼睛不必在現(xiàn)實(shí)世界之間轉(zhuǎn)移焦點(diǎn)到HUD符號(hào),使他們更容易處理和理解信息。 在考慮下一代汽車的ADAS時(shí),減少駕駛員的眼睛重新適應(yīng)時(shí)間變得更加重要,因?yàn)锳DAS允許關(guān)鍵信息非常自然和有效地顯示在顯示屏上。
隨著AR HUDs的采用,汽車設(shè)計(jì)師現(xiàn)在可以選擇將集群和傳統(tǒng)的中心堆棧信息直接放置在駕駛員的視線中,這可以在未來的汽車中提供更多的儀表板設(shè)計(jì)靈活性。 設(shè)計(jì)挑戰(zhàn) 在設(shè)計(jì)過程中,AR HUDs與傳統(tǒng)的HUD系統(tǒng)有著不同的特點(diǎn)和關(guān)注點(diǎn)。AR HUDs提供了一個(gè)更寬的FoV,也提供了一個(gè)更大的眼睛框,這是司機(jī)的頭部和/或眼睛必須在這個(gè)區(qū)域才能看到虛擬圖像。
更大的眼框更適合個(gè)子更高和更矮的司機(jī)。它們還允許更多的頭部運(yùn)動(dòng)(上/下和左/右),而不會(huì)影響虛擬圖像的可見性。擁有一個(gè)更大的眼框簡化了HUD的設(shè)計(jì),因?yàn)槟悴恍枰谲浖姓{(diào)整圖形。不管驅(qū)動(dòng)程序的高度如何,對(duì)象的覆蓋都是正確的。
在增加FoV和擴(kuò)大眼箱時(shí)需要權(quán)衡:增加亮度或流明。光源提供的流明越多,光線就越亮。當(dāng)FoV的尺寸增加一倍時(shí),所需的光量也會(huì)增加一倍。同樣,當(dāng)比較傳統(tǒng)的HUD(一個(gè)小的FoV)和AR HUD(一個(gè)大的FoV)時(shí),所需的光量增加,需要的光源不僅是有效的,而且可以產(chǎn)生大量流明(光)。
另一個(gè)設(shè)計(jì)挑戰(zhàn)是太陽能負(fù)載,太陽能負(fù)載的一個(gè)簡單類比是當(dāng)你用放大鏡聚焦陽光時(shí)所發(fā)生的事情。它產(chǎn)生的點(diǎn)攜帶了大量的太陽能(太陽能負(fù)載)。當(dāng)合并AR HUDs時(shí),因?yàn)槟阌幸粋€(gè)很長的視頻,這樣做的光學(xué)在放大方面變得非常強(qiáng)大——大約25到30倍。
在不吸收所有熱量的情況下,處理如此高的太陽能負(fù)荷是至關(guān)重要的。 AR HUD技術(shù)的另一個(gè)設(shè)計(jì)考慮因素是性能一致性:顯示亮度、顏色、寬工作溫度范圍(熱/冷白天和黑夜)下的質(zhì)量,以及無論駕駛條件如何的可靠性能。
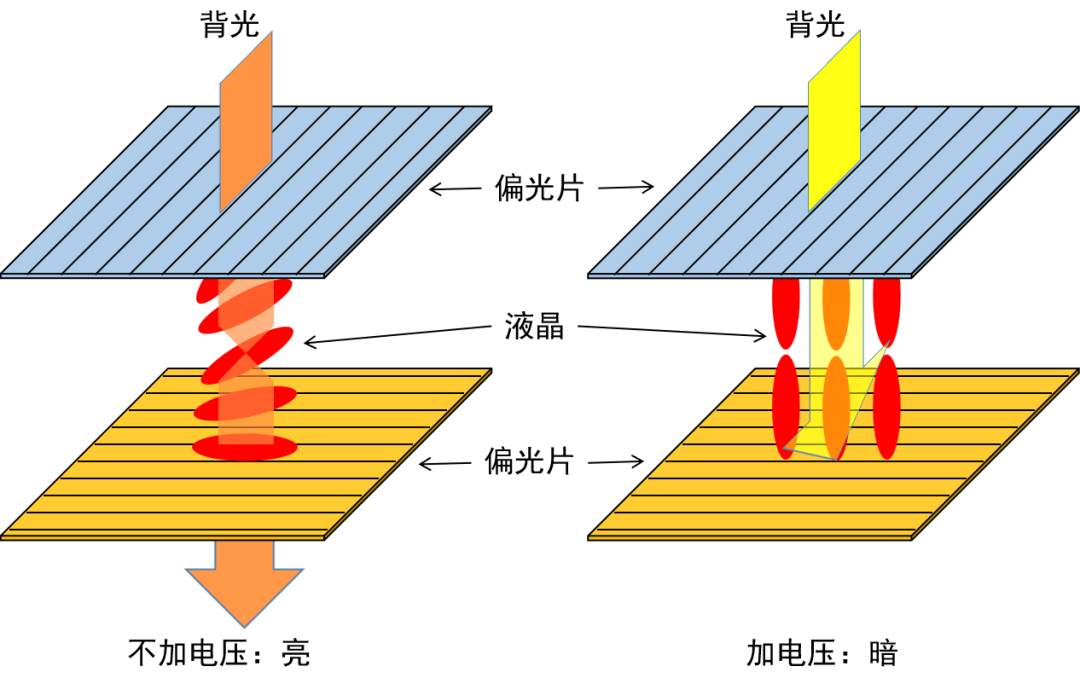
駕駛關(guān)鍵信息,如碰撞警告和車道偏離必須是可見的,在任何時(shí)候,如晚上,在黑暗的隧道,通過雨,在明亮的陽光。 使用偏振光太陽鏡來減少眩光,也被認(rèn)為可以阻止由TFT HUD圖像產(chǎn)生的圖像。AR HUD系統(tǒng)需要允許通過偏振光太陽鏡查看圖像。
雖然偏光太陽鏡減少了眩光,但不幸的是,它們也會(huì)過濾掉一些TFT HUD圖像。DLP技術(shù)是消除偏光太陽鏡對(duì)HUD圖像影響的一種方法。 HUD還必須始終如一地生成明亮,鮮艷和飽和的顏色,這需要寬色托盤。高飽和度對(duì)于紅色特別重要,紅色通常用作警告顏色。
通過正確的設(shè)計(jì),AR HUD可以支持高亮度和寬調(diào)光范圍,并根據(jù)周圍環(huán)境自動(dòng)調(diào)整,使信息在所有駕駛條件下始終可見,使駕駛員能夠查看和響應(yīng)各種信息。 最后,另一個(gè)設(shè)計(jì)考慮是診斷,當(dāng)hud變得更大,并將關(guān)鍵信息定位在駕駛員的直接視線內(nèi)時(shí),顯示器不能出現(xiàn)故障是至關(guān)重要的。這意味著HUD不應(yīng)該顯示超亮的圖像或損壞的數(shù)據(jù)(靜態(tài))圖像,這可能導(dǎo)致驅(qū)動(dòng)程序暫時(shí)失明。
對(duì)HUD映像進(jìn)行可靠的系統(tǒng)監(jiān)視和診斷將變得越來越重要。此外,如果系統(tǒng)發(fā)生故障,它必須能夠立即關(guān)閉。HUD圖像不應(yīng)該干擾司機(jī)的視線,這將干擾車輛的運(yùn)行。
未來的設(shè)計(jì)方法
在AR HUD設(shè)計(jì)面臨的最大挑戰(zhàn)之一是該設(shè)備的物理尺寸,以使其有效地適應(yīng)現(xiàn)代汽車而不會(huì)影響其他重要的車輛功能。HUD包裝尺寸可以變得非常大 - 大約15到20升(0.5到0.7英尺3),所以真正的測(cè)試是找出一種方法將它裝入汽車。
為了應(yīng)對(duì)這一挑戰(zhàn),公司正在研究不同的和更新的技術(shù),如波導(dǎo)和全息薄膜,以幫助減少HUD封裝尺寸。由于DLP技術(shù)與激光器配合使用,因此它支持波導(dǎo)和全息薄膜,這可以進(jìn)一步縮小單元的尺寸。 該行業(yè)正開始用更新、更小的技術(shù)取代傳統(tǒng)的HUD光學(xué)設(shè)備,如鏡子。作為一個(gè)額外的好處,這些不同的技術(shù)允許更大的FoV,所以現(xiàn)在有可能以15 x 5度或更大的FoV HUD為目標(biāo)。這種替代設(shè)計(jì)方法使更多的汽車制造商能夠更好地將增強(qiáng)現(xiàn)實(shí)技術(shù)應(yīng)用到汽車中。
此外,HUD設(shè)計(jì)需要支持實(shí)時(shí)車輛傳感器數(shù)據(jù)和人機(jī)交互軟件,以便在動(dòng)態(tài)環(huán)境中準(zhǔn)確地疊加符號(hào)。從多個(gè)系統(tǒng)獲取傳感器數(shù)據(jù),并在現(xiàn)實(shí)世界中直觀地表示它,以便駕駛員能夠理解并采取行動(dòng),這需要復(fù)雜的系統(tǒng)來進(jìn)行通信和處理大量數(shù)據(jù)。汽車系統(tǒng)設(shè)計(jì)人員正致力于開發(fā)有效且高效的方法,以實(shí)時(shí)準(zhǔn)確地捕獲,處理和顯示該傳感器數(shù)據(jù)。
編輯:jq
-
HUD
+關(guān)注
關(guān)注
15文章
158瀏覽量
46542
原文標(biāo)題:HUD抬頭顯示技術(shù)如何改變駕駛體驗(yàn)?
文章出處:【微信號(hào):Highway_2012,微信公眾號(hào):海微科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
DLP3030-Q1抬頭顯示器(HUD)Piccolo SPI用戶手冊(cè)

增強(qiáng)現(xiàn)實(shí)抬頭顯示和數(shù)字抬頭區(qū)別
增強(qiáng)現(xiàn)實(shí)抬頭顯示是啥意思
經(jīng)緯恒潤AR HUD市占率躋身前五!

解析HUD顯示的技術(shù)原理
水晶光電榮獲HUD領(lǐng)域“卓越應(yīng)用獎(jiǎng)”
高精度HUD平視顯示系統(tǒng)的首選IC S2D13V42

哪些關(guān)鍵技術(shù)在支撐著數(shù)字座艙?

用于HUD平視顯示器的控制芯片:S2D13V40
日本EPSON 愛普生HUD汽車抬頭顯示系統(tǒng)芯片

愛普生HUD芯片車規(guī)晶振和陀螺儀的汽車抬頭顯示系統(tǒng)方案

汽車抬頭顯示系統(tǒng)的應(yīng)用介紹

車載HUD(抬頭顯示器)的起源和發(fā)展
太陽光模擬器溫升測(cè)試HUD TFT汽車抬頭顯示器

太陽光下不同光照條件HUD抬頭顯示器機(jī)載光電系統(tǒng)性能模擬器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論