 淺析HiL中智能傳感器PSI5整體簡介
淺析HiL中智能傳感器PSI5整體簡介
隨著汽車內智能傳感器使用的增加,傳統的傳感器信號不能滿足傳輸豐富的編碼信息以及EMC要求。PSI5(外圍傳感器接口)作為汽車傳感器的開放標準接口,可以更好地滿足動力/安全/底盤/舒適域控制器的應用安全。PSI5誕生于已成熟使用的ECU外圍傳感器接口,如Bosch等廠商將PSI5應用于ESP、安全氣囊、主動懸架、自動駕駛等ECU與加速度、角速度、壓力、位置等傳感器的通訊當中。
PSI5整體簡介
PSI5協會成員由多家一級供應商及芯片廠商組成,包括Veoneer、Bosch和Continental等。PSI5 V1.3版本在目前量產車型中有著廣泛的應用。從V2.0版本開始,PSI5在Base規范之外,提供針對安全氣囊、車輛動力學控制、動力系統三個部分的子規范。最新的V2.3規范在物理層、數據鏈路層和應用層方面提供新的內容和結構,并且兼容V1.3版本定義的參數。
物理層
傳感器與ECU使用1對雙絞線進行連接,ECU對傳感器的供電和雙向數據傳輸均通過雙絞線完成,通訊速率有125kbps和189kbps兩種可選。傳感器和ECU連接拓撲主要包括:異步連接模式(PSI5-A)、同步并行總線模式(PSI5-P)、同步通用總線模式(PSI5-U)、同步菊花鏈總線模式(PSI5-D)。
當傳感器向ECU傳輸數據時,低電流為傳感器靜態消耗電流,高電流由傳感器內部調制產生,采用曼徹斯特編碼。每個傳感器在1個ECU同步周期內,傳輸數據的幀間隔需要至少保持TGap,其值需要大于位長度TBit。
數據鏈路層 - 傳感器至ECU的通信
傳感器周期性發送數據幀至ECU,每個數據幀由p個位組成,包含:
2個起始位,始終編碼為0;
1個奇偶校驗位或3個CRC校驗位;
k (10-28)個有效數據位;
》 數據域A(10-24個位,強制);
》 數據域B(0-12個位,可選);
》 傳感器狀態位(也稱為錯誤標志位,0-2個位,可選);
》 幀控制位(表明當前幀/數據的類型或傳感器ID,0-4個位,可選);
》 串行報文通道(0或2個位,可選)。
在同步模式中,ECU在向傳感器供電的基礎上,周期性發送一個高電平電壓信號作為同步脈沖。各傳感器在檢測到同步脈沖后,按照預先配置的時隙(Time Slot)發送各自的電流信號以傳輸數據。
當串行報文(Serial Message)通道位設置為2個位長度時,串行報文將通過18個連續的幀進行傳輸,一般用于更新周期要求不高的數據。
數據鏈路層 - ECU至傳感器的通信
ECU至傳感器的通訊幀由以下部分組成:
特定的發送起始條件,保證即使失去同步也可以安全地檢測到幀起始;
數據域;
Checksum校驗段。
利用在同步模式下ECU周期性向傳感器發送同步脈沖的特性,根據幀的發送編碼方式不同,提供相應的2類幀格式:
第一種Tooth Gap方式是通過調整ECU周期發送的同步脈沖“有/無”來分別表示“1/0”信號。該發送起始條件包含至少5個連續的邏輯0或至少31個連續的邏輯1。數據長度由傳感器地址(SAdr)和功能代碼(FC)定義。提供3種可選幀格式。
第二種Pulse Width方式是通過改變ECU周期發送的同步脈寬寬度“長/短”來分別表示“1/0”。提供1種可選幀格式。
應用層 – 數據范圍
對于在數據域A中傳輸的10位數據,PSI5規范將其分為3個部分:
-480至+480(0x1E0 – 0x220)為傳感器實際輸出信號值;
-512至-481(0x200 – 0x20F)為塊(Block)ID及數據,用于傳輸初始化數據;
+481至+511(0x1E1 – 0x1FF)為狀態及錯誤報文。
對于數據域A中大于10位數據的低位部分以及數據域B,不受該數據范圍劃分影響。
應用層 – 傳感器初始化
在每次上電或重置后,需在發送任何有效的傳感器數據之前發送其初始化辨識信息。
初始化一般分為3個階段。
階段1:傳感器啟動,無數據發送;
階段2:發送ID + 初始化數據信息,同時傳感器進行自檢;
階段3:發送傳感器自檢結果。初始化完成后即可傳輸正常數據以及傳感器自檢的狀態信息。
階段2時初始化數據一般包含傳感器的類型、制造商代碼、生產日期等信息。為保證不同傳感器廠商的產品與ECU可以正常建立通訊,需要明確基本的互換性要求:傳感器配置、連接模式和時間參數;供電及同步脈沖等電壓參數;傳感器電流驅動能力以及所需承受的回路負載;初始化數據信息,包括重復次數(k)。具體可參考PSI5協會提供的一致性測試規范及Check List。
HiL臺架中PSI5解決方案:
隨著智能傳感器PSI5信號在安全、底盤和動力域中的應用逐步增加,傳統的HiL臺架需要新購或升級擴展來滿足PSI5協議的仿真、分析和測試功能。
PSI5傳感器測試:6槽VT System,配置VT2710和CANoe Option Sensor;
PSI5控制器測試:通過CANoe、vTESTstudio、VT System、DYNA4提供開環和閉環的安全域及底盤域HiL系統;
》 特殊信號或系統采用ASAM XIL API集成第三方設備;
》 通過CANoe Option AMD/XCP采集ECU內部A2L變量,滿足基本功能測試。
硬件
PSI5的仿真、分析、測試由VT System中的VT2710板卡及配套的PSI5SENTpiggy完成。VT System是Vector針對ECU功能、總線一致性、診斷通信、環境耐久等測試場景提供的模塊化I/O及總線板卡。VT2710板卡提供4路PSI5通道,可通過配置實現傳感器仿真、ECU仿真、監聽通信工作模式,內置電氣故障注入功能。
軟件
CANoe Option Sensor提供PSI5所需各項電氣、信號、初始化數據的直觀配置圖形界面,配置信息可單獨導出復用于其他項目工程。配置完成后將自動生成PSI5的監控及激勵接口——系統變量。系統變量在CANoe及vTESTstudio中的靈活使用,使其可無縫集成到已有的仿真、分析以及HiL測試環境當中。
通過模擬ECU或傳感器,CANoe Option Sensor支持開發工程師及測試工程師建立從簡單到苛刻的測試環境,可實現對協議相關數據的自由控制及修改。此外,CANoe Option Sensor的錯誤檢測機制有助于對傳感器及ECU組成的真實系統進行監測和調試。
實際使用
CANoe Option Sensor的配置窗口位于Hardware – Sensors – Protocol Configuration:
對于不同的串行總線,提供多種初始化配置模板供用戶選擇,方便快捷:
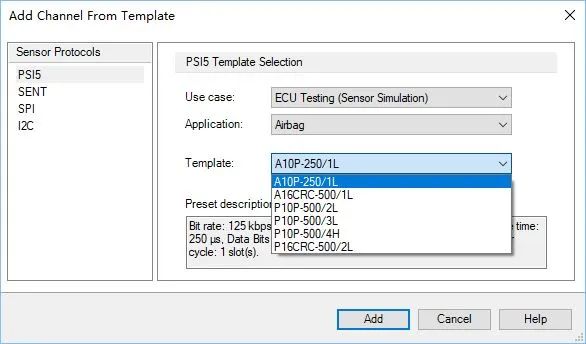
圖8 | PSI5初始化配置模板
對于ECU及Sensor,可隨時配置其為Real或Simulated模式。同時對于ECU和傳感器各自的通信速率、供電電平、同步脈沖電壓及時間參數、Slot時間、初始化協議版本、數據幀結構等提供豐富的配置選項,對每個信號可單獨配置其時間參數、初始化參數及解析方式:
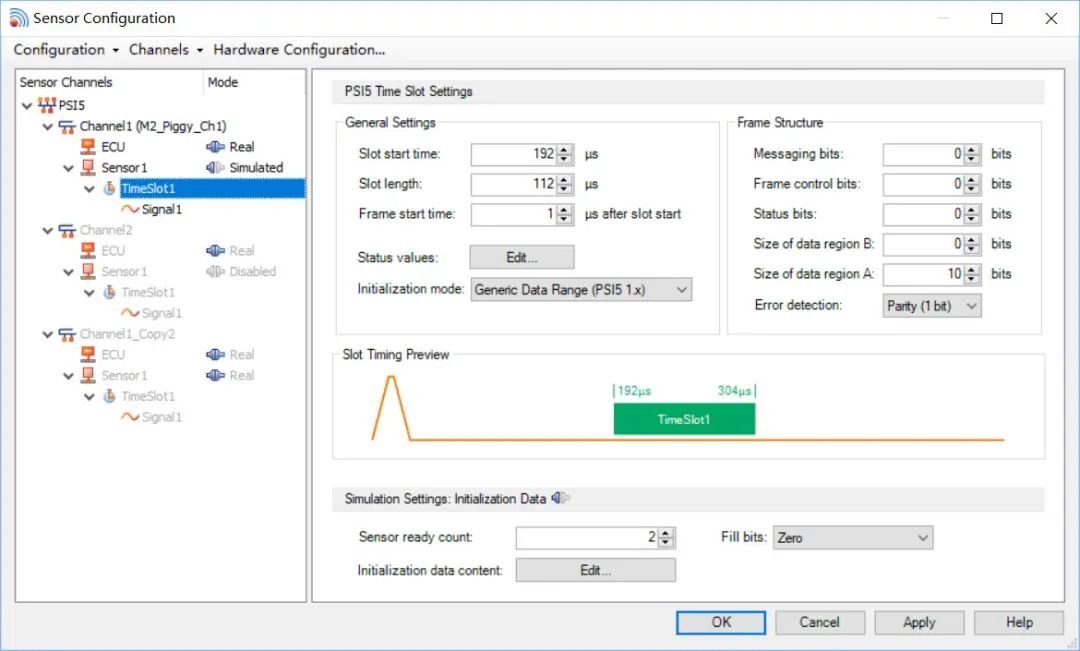
PSI5數據域信號配置界面
配置完成后,連接VT2710與ECU或傳感器對應的線束,即可建立通訊:
運行及離線回放時,工程師熟悉的Trace、Graphic、Data等分析窗口依然適用,并且針對PSI5做特定解析;
根據配置情況,生成對應的系統變量接口,配合CAPL函數可完成協議各類信息的修改,用于仿真及HiL測試;
配合CANoe Option Scope及相關硬件,可完成PSI5的物理波形解析;
對于通信過程中的錯誤,各類故障均會給出故障碼用于調試參考;
PSI5常應用于主動/被動安全域相關ECU,以及自動駕駛ECU等對功能安全要求較高的領域,同時PSI5有其獨立的硬件、軟件定義規范,因此對PSI5協議也應與CAN、LIN、Ethernet等常見總線協議一樣,需考慮其一致性測試的重要性,以確保傳感器可以為ECU的正常工作提供良好的外部輸入信息。PSI5協會提供對ECU和傳感器使用的一致性測試規范以及Check List,可作為一致性測試的實施參考。
編輯:jq
-
傳感器
+關注
關注
2551文章
51125瀏覽量
753763 -
ecu
+關注
關注
14文章
886瀏覽量
54517 -
PSI
+關注
關注
0文章
15瀏覽量
9105
原文標題:淺析 HiL中智能傳感器PSI5信號仿真與測試
文章出處:【微信號:Elektrobit_EB,微信公眾號:Elektrobit_EB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
智能駕駛HIL仿真測試解決方案

智能馬桶水溫NTC溫度傳感器
智能廚房應用什么傳感器
霍爾傳感器在智能呼啦圈中的應用


基于CANoe在電控懸架系統中PSI5傳感器仿真及應用


TC397調用IfxPsi5s_Psi5s_getReadFrameStatus()時一直都讀不到有數據的狀態是怎么回事?
無法使用TLE4999x EVAL_PASCO2_SENSOR讀取數據的原因?如何解決?
壓力傳感器型號及參數 壓力傳感器分類及用途
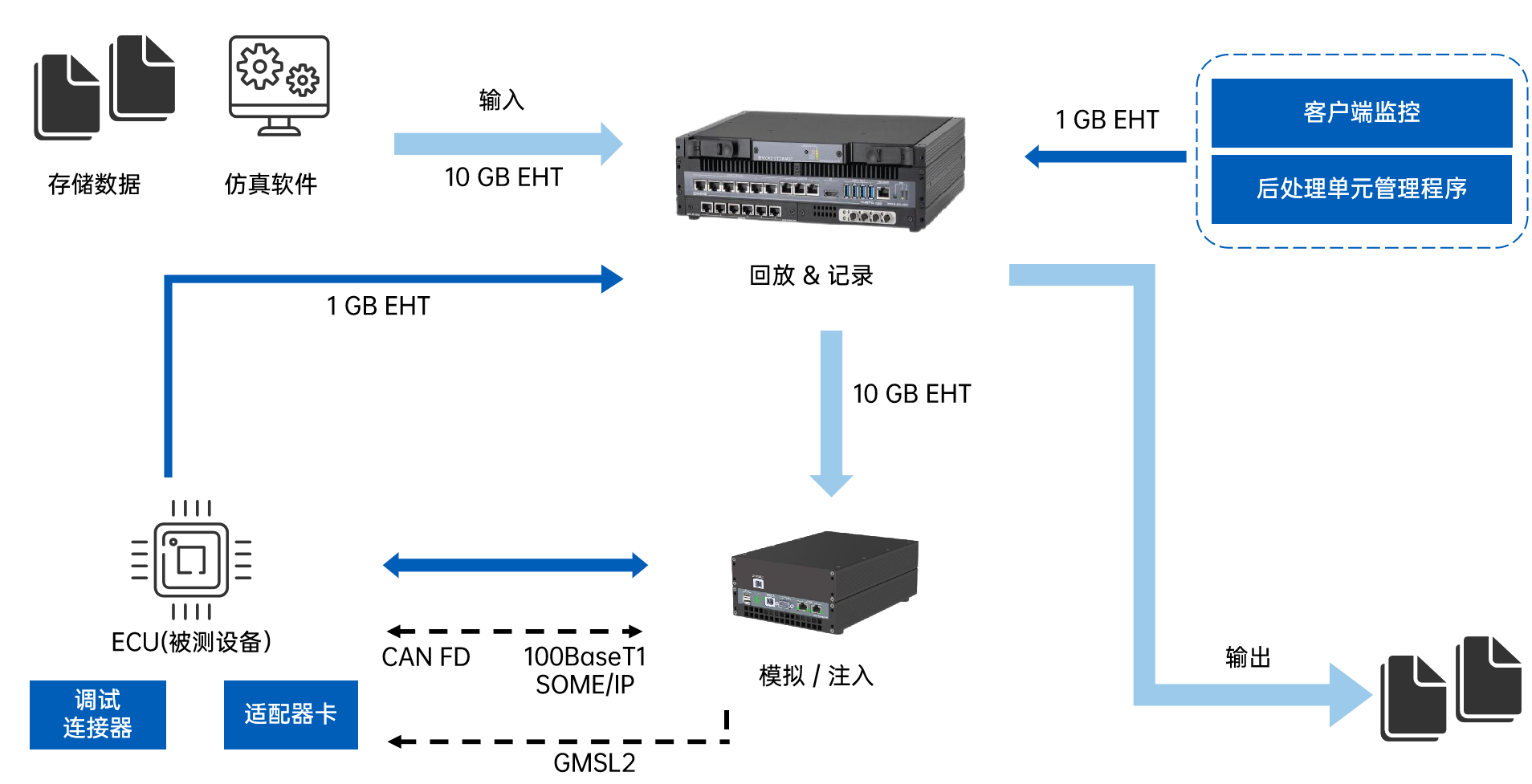
康謀方案 | 基于場景的端到端硬件在環(HiL)測試智能解決方案





 工商網監
工商網監
評論