") Verilog HDL-同步技術(shù)你了解多少
Verilog HDL-同步技術(shù)你了解多少
同步技術(shù)
在芯片設(shè)計(jì)中,數(shù)據(jù)同步和在不同時(shí)鐘域之間進(jìn)行數(shù)據(jù)傳輸會(huì)經(jīng)常出現(xiàn)。為避免任何差錯(cuò)、系統(tǒng)故障和數(shù)據(jù)破壞,正確的同步和數(shù)據(jù)傳輸就顯得格外重要。這些問題的出現(xiàn)往往比較隱蔽,不易被發(fā)現(xiàn),因此正確進(jìn)行跨時(shí)鐘域處理就顯得極為重要。實(shí)現(xiàn)數(shù)據(jù)同步有許多種方式,在不同的情況下進(jìn)行恰當(dāng)?shù)耐椒绞竭x擇非常重要。以計(jì)算機(jī)中的南橋芯片為例,它通過不同的接口(如PCIe USB 吉比特以太網(wǎng)等)與外部設(shè)備相連。南橋通過不同的接口與外圍設(shè)備相連,它與北橋之間是一個(gè)通用數(shù)據(jù)接口。南橋芯片中需要使用數(shù)據(jù)同步技術(shù),目前,常用的同步技術(shù)主要分為以下幾類:
- 在不同的時(shí)鐘域之間使用FIFO
- 在不同的時(shí)鐘域之間使用握手信號(hào)
- 相位差固定的同步域內(nèi)部的數(shù)據(jù)傳輸
- 準(zhǔn)同步域之間的數(shù)據(jù)傳輸
使用FIFO進(jìn)行的數(shù)據(jù)同步
當(dāng)存在兩個(gè)異步時(shí)鐘域并且二者之間進(jìn)行數(shù)據(jù)包傳輸時(shí),雙端口FIFO最為適合。FIFO有兩個(gè)端口,一個(gè)端口寫入輸入數(shù)據(jù),另一個(gè)端口讀出數(shù)據(jù),如圖6.34所示。兩個(gè)端口工作在相互獨(dú)立的時(shí)鐘域內(nèi),通過各自的指針(地址)來讀寫數(shù)據(jù)。由于每個(gè)端口工作在相互獨(dú)立的時(shí)鐘域內(nèi),因此讀寫操作可以獨(dú)立實(shí)現(xiàn)并且不會(huì)出現(xiàn)任何差錯(cuò)。當(dāng)FIFO變滿時(shí),應(yīng)停止寫操作,直到FIFO中出現(xiàn)空閑空間。同樣,當(dāng)FIFO為空時(shí),應(yīng)停止讀操作,直到有新的數(shù)據(jù)被寫入FIFO中。
握手同步方式
FIFO可用于在不同的時(shí)鐘域之間進(jìn)行數(shù)據(jù)包的傳輸,但是在一些應(yīng)用中需要在不同時(shí)鐘域之間進(jìn)行少量數(shù)據(jù)傳輸。FIFO占用的硬件資源較大,此時(shí)可以考慮使用握手同步機(jī)制.
所謂握手,即通信雙方使用了專用控制信號(hào)進(jìn)行狀態(tài)指示,這個(gè)控制信號(hào)既有發(fā)送域給接受域的也有接收域給控制域的,有別于單向控制信號(hào)方式。
使用握手協(xié)議方式處理跨時(shí)鐘域數(shù)據(jù)傳輸時(shí),只需要對(duì)雙方的握手信號(hào)(req 和 ack)分別使用脈沖檢測(cè)方法進(jìn)行同步,在具體實(shí)現(xiàn)中,假設(shè)req ,ack, data,總線在初始化時(shí)都處于無效狀態(tài),發(fā)送域先把數(shù)據(jù)放入總線,隨后發(fā)送有效的req信號(hào)給接收域;接收域在檢測(cè)到有效的req信號(hào)后鎖存數(shù)據(jù)總線,然后會(huì)送一個(gè)有效的ack信號(hào)表示讀取完成應(yīng)答;發(fā)送域在檢測(cè)到有效ack信號(hào)后撤銷當(dāng)前的req信號(hào),接收域在檢測(cè)到req撤銷后也相應(yīng)撤銷ack信號(hào),此時(shí)完成一次正常握手通信,此后,發(fā)送域可以繼續(xù)開始下一次握手通信,如此循環(huán),該方式能夠使接收到的數(shù)據(jù)穩(wěn)定可靠,有效的避免了亞穩(wěn)態(tài)的出現(xiàn),但是控制信號(hào)握手檢測(cè)會(huì)消耗通信雙方較多的時(shí)間。

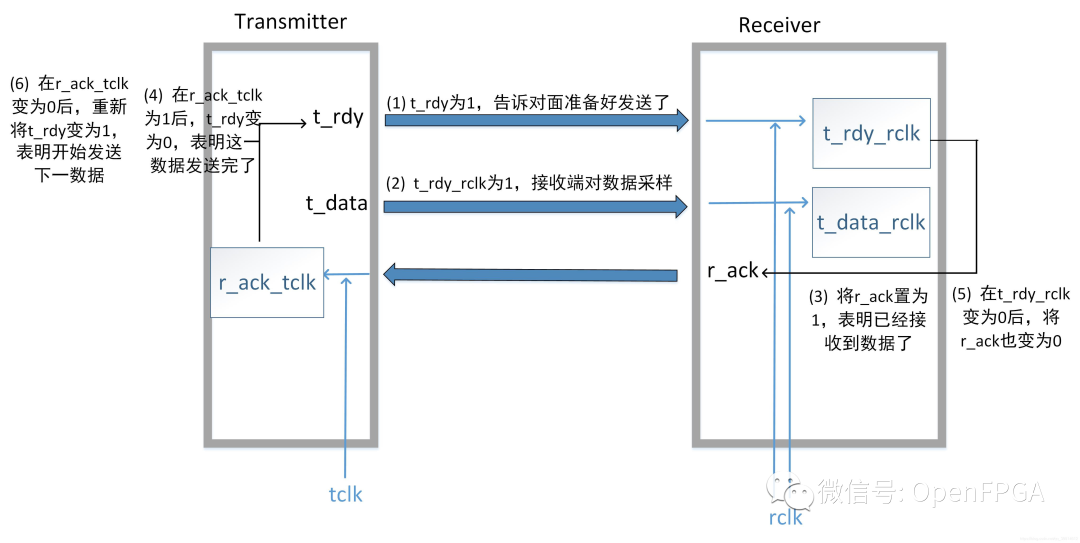
以下是握手同步機(jī)制的工作步驟:
-
用后綴_t表示發(fā)送端,用后綴_r表示接收端。發(fā)送時(shí)鐘用tclk表示,接收時(shí)鐘用rclk表示。數(shù)據(jù)從tclk域向rclk域傳輸;
-
當(dāng)需要發(fā)送的數(shù)據(jù)準(zhǔn)備好后,發(fā)送端將t_rdy信號(hào)置為有效,該信號(hào)必須在tclk下降沿時(shí)釆樣輸出;
-
在t_rdy有效期間,t_data必須保持穩(wěn)定;
-
接收端在rclk域中采用雙同步器同步t_rdy控制信號(hào),并把同步后的信號(hào)命名為t_rdy_rclk;
-
接收端在發(fā)現(xiàn)t_rdy_rclk信號(hào)有效時(shí),tdata已經(jīng)安全地進(jìn)入了rclk域,使用rclk對(duì)其進(jìn)行采樣,可以得到t_data_rclk。由于由于數(shù)據(jù)已經(jīng)在rclk域進(jìn)行了正確采樣,所以此后在rclk域使用該數(shù)據(jù)是安全的;
-
接收端將r_ack信號(hào)置位1,信號(hào)必須在rclk下降沿輸出;
-
發(fā)送端通過雙同步器在tclk域內(nèi)同步r_ack信號(hào),同步后的信號(hào)稱為r_ack_tclk;
-
以上所有步驟稱為半握手。tclk1,這是因?yàn)榘l(fā)送端在輸出下一數(shù)據(jù)之前,不會(huì)等r_ack_tclk被置為0;
-
半握手機(jī)制工作速度快,但是,使用半握手機(jī)制時(shí)需要謹(jǐn)慎,一旦使用不當(dāng),會(huì)導(dǎo)致操作錯(cuò)誤;
-
從低頻時(shí)鐘域向高頻時(shí)鐘域傳輸數(shù)據(jù)時(shí),半握手機(jī)制較為適用,這是由于接收端可以更快地完成操作。然而,如果從高頻時(shí)鐘域向低頻時(shí)鐘域傳輸數(shù)據(jù),則需要采用全握手機(jī)制;
-
當(dāng)r_ack_tclk為高電平時(shí),發(fā)送端將t_rdy置為0;
-
當(dāng)t_rdy_rclk為低電平時(shí),接收端將r_ack置為0;
-
當(dāng)發(fā)送端發(fā)現(xiàn)r_ack_tclk為低電平后,全握手過程結(jié)束,傳輸端可以發(fā)送新的數(shù)據(jù);
-
顯然,全握手過程耗時(shí)較長,數(shù)據(jù)傳輸速度較慢。然而,全握手機(jī)制穩(wěn)定可靠,可以在兩個(gè)任意頻率的時(shí)鐘域內(nèi)安全地進(jìn)行數(shù)據(jù)傳輸。如圖6.35所示為全握手機(jī)制工作波形。
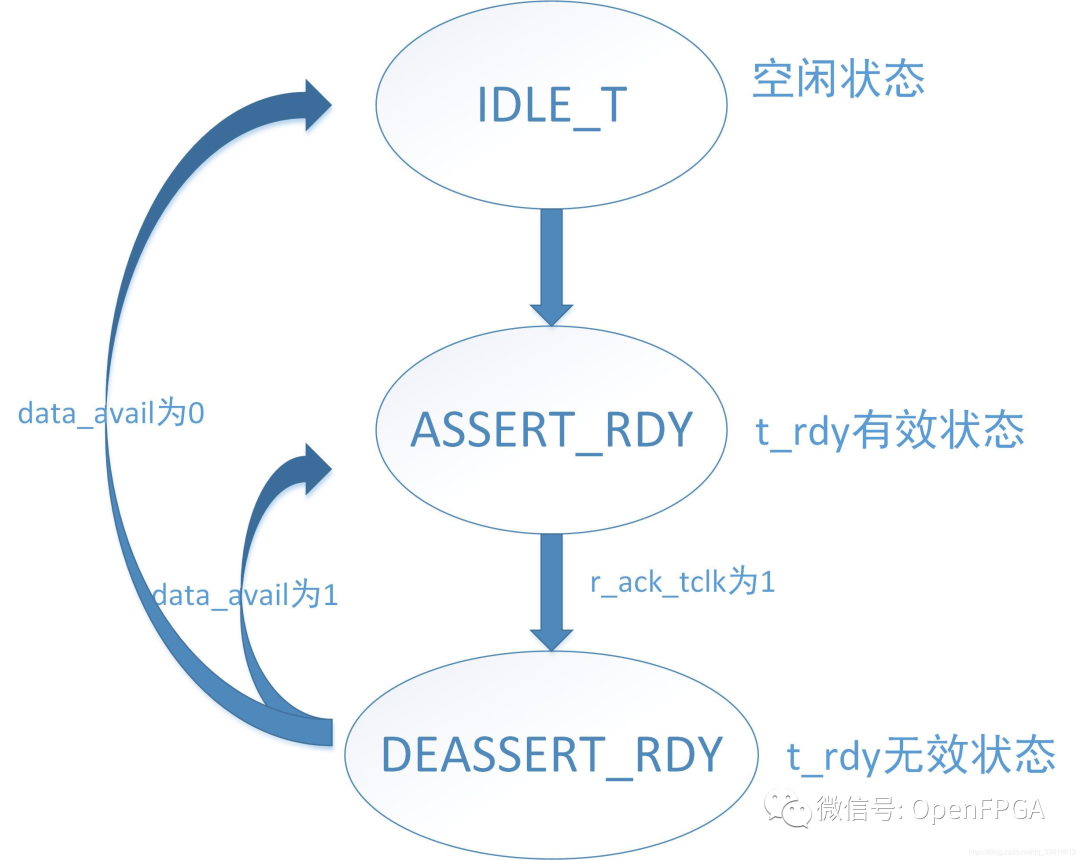
上面過程比較繞口,因此我制作了一張流程圖,如下所示:
全握手機(jī)制代碼及仿真結(jié)果如下。
發(fā)送端:使用三個(gè)狀態(tài)的狀態(tài)機(jī),其跳轉(zhuǎn)關(guān)系如下:
moduletransmit(tclk,reset_tclk,t_rdy,data_avail,transmit_data,t_data,r_ack);
inputtclk;
inputreset_tclk;
inputdata_avail;
input[31:0]transmit_data;
inputr_ack;
outputt_rdy;
outputt_data;
localparamIDLE_T=2'd0,
ASSERT_T_RDY=2'd1,
DEASSERT_T_RDY=2'd2;
reg[1:0]t_hndshk_state,t_hndshk_state_nxt;
regt_rdy,t_rdy_nxt;
reg[31:0]t_data,t_data_nxt;
regr_ack_tclk;
always@(*)begin
t_hndshk_state_nxt=t_hndshk_state;
t_rdy_nxt=1'b0;
t_data_nxt=t_data;
case(t_hndshk_state)
IDLE_T:begin
if(data_avail)begin
t_rdy_nxt=1'b1;
t_hndshk_state_nxt=ASSERT_T_RDY;
t_data_nxt=transmit_data;
end
end
ASSERT_T_RDY:begin
if(r_ack_tclk)begin
t_rdy_nxt=1'b0;
t_hndshk_state_nxt=DEASSERT_T_RDY;
t_data_nxt='d0;
end
elsebegin
t_rdy_nxt=1'b1;
t_data_nxt=transmit_data;
end
end
DEASSERT_T_RDY:begin
if(!r_ack_tclk)begin
if(data_avail)begin
t_rdy_nxt=1'b1;
t_hndshk_state_nxt=ASSERT_T_RDY;
t_data_nxt=transmit_data;
end
elsebegin
t_hndshk_state_nxt=IDLE_T;
end
end
end
endcase
end
always@(posedgetclkornegedgereset_tclk)begin
if(!reset_tclk)begin
t_rdy<=?1'b0;
t_hndshk_state<=?IDLE_T;
??t_data?<=?32'h00000000;
r_ack_tclk<=?1'b0;
end
elsebegin
t_rdy<=?t_rdy_nxt;
??t_hndshk_state?<=?t_hndshk_state_nxt;
??t_data?<=?t_data_nxt;
??r_ack_tclk?<=?r_ack;
?end
?
end
endmodule?
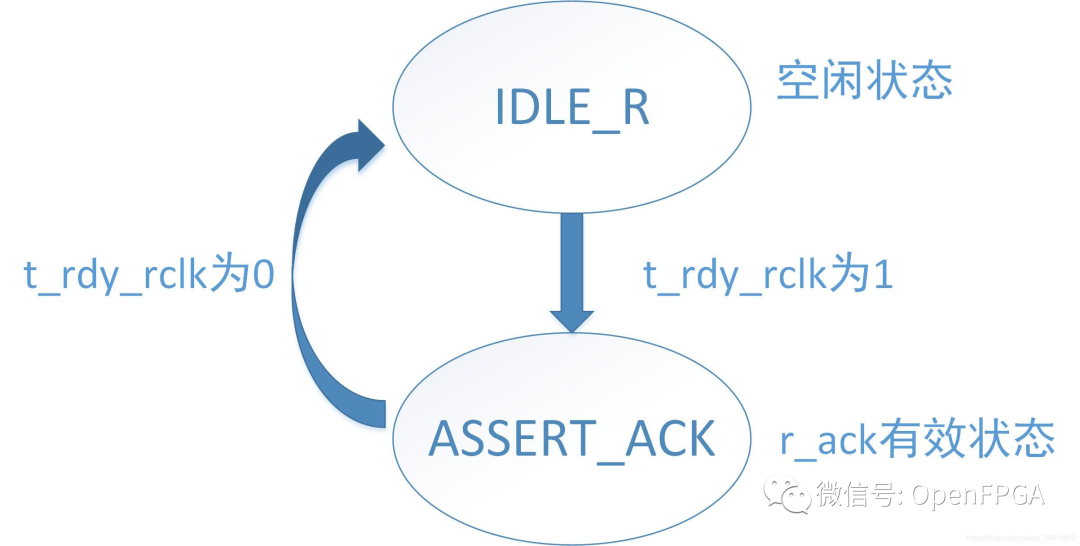
接收端:使用兩個(gè)狀態(tài)的狀態(tài)機(jī),跳轉(zhuǎn)關(guān)系如下:
modulereceiver(rclk,reset_rclk,t_rdy,t_data,r_ack);
inputrclk,reset_rclk;
inputt_rdy;
input[31:0]t_data;
outputr_ack;
regr_hndshk_state,r_hndshk_state_nxt;
regt_rdy_rclk;
reg[31:0]t_data_rclk,t_data_rclk_nxt;
regr_ack,r_ack_nxt;
localparamIDLE_R=1'b0,
ASSERT_ACK=1'b1;
always@(*)begin
r_hndshk_state_nxt=r_hndshk_state;
r_ack_nxt=1'b0;
t_data_rclk_nxt=t_data_rclk;
case(r_hndshk_state)
IDLE_R:begin
if(t_rdy_rclk)begin
r_hndshk_state_nxt=ASSERT_ACK;
t_data_rclk_nxt=t_data;
r_ack_nxt=1'b1;
end
end
ASSERT_ACK:begin
if(!t_rdy_rclk)begin
r_hndshk_state_nxt=IDLE_R;
r_ack_nxt=1'b0;
end
elsebegin
r_ack_nxt=1'b1;
end
end
endcase
end
always@(posedgerclkornegedgereset_rclk)begin
if(!reset_rclk)begin
r_hndshk_state<=?IDLE_R;
??t_data_rclk?<=?1'b0;
t_rdy_rclk<=?1'b0;
r_ack<=?1'b0;
end
elsebegin
r_hndshk_state<=?r_hndshk_state_nxt;
??t_data_rclk?<=?t_data_rclk_nxt;
??t_rdy_rclk?<=?t_rdy;
??r_ack?<=?r_ack_nxt;
?end
end
endmodule
測(cè)試代碼
`timescale1ns/1ns
moduletestbench;
regtclk_tb,rclk_tb;
reg[31:0]transmit_data_tb;
regreset_tclk_tb,reset_rclk_tb;
regdata_avail_tb;
wiret_rdy_tb;
wire[31:0]t_data_tb;
wirer_ack_tb;
parameterCLK_HALF_PERIOD1=5;
parameterCLK_HALF_PERIOD2=8;
parameterRESET_DELAY=100;
initialbegin
tclk_tb=0;
rclk_tb=0;
end
always#CLK_HALF_PERIOD1tclk_tb=~tclk_tb;
always#CLK_HALF_PERIOD2rclk_tb=~rclk_tb;
initialbegin
reset_rclk_tb=0;
reset_tclk_tb=0;
#RESET_DELAYreset_rclk_tb=1;
reset_tclk_tb=1;
end
initialbegin
#500;
data_avail_tb=1;
transmit_data_tb=32'h96431346;
end
transmittransmit_test
(.tclk(tclk_tb),
.reset_tclk(reset_tclk_tb),
.t_rdy(t_rdy_tb),
.data_avail(data_avail_tb),
.transmit_data(transmit_data_tb),
.t_data(t_data_tb),
.r_ack(r_ack_tb));
receiverreceiver_test
(.rclk(rclk_tb),
.reset_rclk(reset_rclk_tb),
.t_rdy(t_rdy_tb),
.t_data(t_data_tb),
.r_ack(r_ack_tb));
endmodule
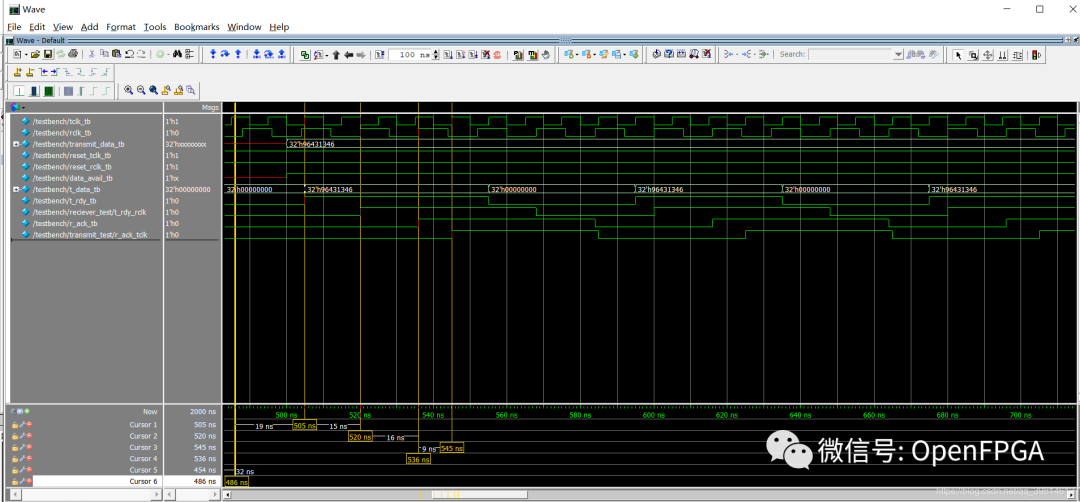
仿真結(jié)果
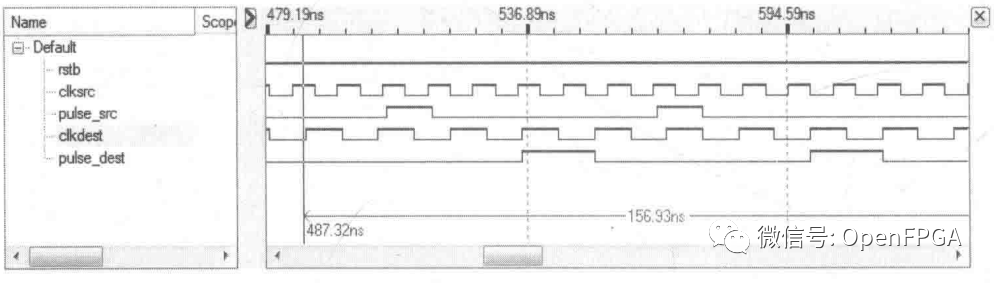
脈沖同步器
脈沖同步器在源時(shí)鐘域內(nèi)接收一個(gè)脈沖,在目的時(shí)鐘域內(nèi)產(chǎn)生一個(gè)脈沖。脈沖同步器內(nèi)部通常采用全握手機(jī)制來產(chǎn)生輸出脈沖。在討論脈沖同步器工作原理之前,我們先討論它的用途。有時(shí)狀態(tài)機(jī)希望更新不同時(shí)鐘域內(nèi)寄存器的數(shù)值,它可以采用全握手同步機(jī)制來達(dá)到這一目的,但全握手同步機(jī)制存在同步延遲大的問題,在全握手完成之前,狀態(tài)機(jī)都將處于等待對(duì)方響應(yīng)的狀態(tài)。
為了解決這一問題,可以引入脈沖同步器電路。引入脈沖同步器后,狀態(tài)機(jī)在源時(shí)鐘域內(nèi)產(chǎn)生更新脈沖,此后繼續(xù)執(zhí)行其他操作。脈沖同步器可以接收脈沖并完成剩余的同步和輸出脈沖產(chǎn)生工作。需要注意的是,脈沖同步器完成全握手操作需要消耗多個(gè)時(shí)鐘周期,因此狀態(tài)機(jī)發(fā)出的兩個(gè)脈沖之間需要足夠的時(shí)間間隔,否則就會(huì)出現(xiàn)邏輯錯(cuò)誤。下面是脈沖同步器的工作步驟、Verilog代碼及仿真結(jié)果。
步驟:
-
當(dāng)源脈沖(pulse_src)有效時(shí),在源時(shí)鐘域中生成一個(gè)信號(hào),并且保持有效(該信號(hào)稱為sig_stretched);
-
使用同步器在目的時(shí)鐘域中對(duì)sig_stretched信號(hào)進(jìn)行同步,稱為sig_stretched_dest;
-
sig_stretched_dest信號(hào)被送回到源時(shí)鐘域并進(jìn)行同步稱為sig_stretched_ack;
-
如果sig_stretched_ack=1,則產(chǎn)生一個(gè)脈沖,根據(jù)這一反饋脈沖來將sig_stretched置為0(完成全握手);
-
基于sig_stretched_dest,在目的時(shí)鐘域中產(chǎn)生一個(gè)脈沖稱為pulse_dest。
modulepulse_synchronizer
(clksrc,
resetb_clksrc,
clkdest,
resetb_clkdest,
pulse_src,
pulse_dest);
//*******************************************************
inputclksrc;
inputresetb_clksrc;
inputclkdest;
inputresetb_clkdest;
inputpulse_src;//pulseinsourceclockdomain
outputpulse_dest;//pulseindestinationclockdomain
regsig_stretched;
wiresig_stretched_nxt;
regsig_stretched_syncl,sig_stretched_dest;
regsig_stretched_dest_dl;
regsig_stxetched_ack_pre,sig_stretched_ack,
regsig_stretched_ack_d1;
wiresig_stretched_ack_edge;
wirepulse_dest;
assignsig_stretched_nxt=sig_stretched_ack_edge?1'b0:(pulse_src?l'bl:sig_stretched);
always@(posedgeclksrcornegedgeresetb_clksrc)
begin
if(!resetb_clksrc)
sig_stretched<=?1'bO;
else
sig_stretched<=?sig_stretched_nxt;
end
//First?two?flops?for?synchronizing?and?the?third?one?for?pulse?generation
always?@(posedge?clkdest?or?negedge?resetb_clkdcst)
begin
if?(!resetb_clkdest)
begin
?sig_stretched_sync?<=?1'b0;
sig_stretchcd_dest<=?1'b0;
sig_stretched_dest_d1<=?1'b0;
end
else
begin
sig_stretchcd_sync1<=?sig_stretched;
sig_stretched_dest??<=?sig_stretched_sync1;
sig_stretched_dest_d1?<=?sig_stretched_dest;
end
end
//?First?two?flops?are?forsynchronizingbacktosourceclockdomain.
//thirdflopisforedgedetection
always@(posedgeclksrcornegedgeresetb_clksrc)
begin
if(!resetb_clksrc)
begin
sig_strctched_ack_pre<=?1'b0;
sig_stretchecl_ack<=?1'b0;
sig_stretched_ack_d1<=?1'b0;
end
else
begin
sig_stretched_ack_pre<=?sig_stretched_dest;
sig_stretched_ack?????<=?sig_stretched_ack_pre;
sig_stretchcd_ack_d1??<=?sig_strctched_ack;
end
end
assign?sig_stretched_ack_edge?=?sig_stretched_ack?&?!sig_stretched_ack_d1;
//?Pulse?generation?in?destination?clock?domain
assign?pulse_dest?=?sig_stretched_dest?&?!sig_stxctched_dest_d1;
endmodule
相位、頻率關(guān)系固定時(shí)的跨時(shí)鐘域數(shù)據(jù)傳輸
如果兩個(gè)時(shí)鐘具有相同或者整數(shù)倍的頻率關(guān)系,上升沿之間有固定、明確的相位關(guān)系,那么在不使用FIFO或者握手協(xié)議的情況下,可以進(jìn)行數(shù)據(jù)傳輸。此時(shí)固定明確的相位關(guān)系非常重要,數(shù)據(jù)傳遞時(shí)的建立時(shí)間和保持時(shí)間必須滿足要求,如果相位關(guān)系不固定、不明確,則無法采用這種機(jī)制進(jìn)行跨時(shí)鐘域數(shù)據(jù)傳遞。在系統(tǒng)復(fù)位之后,需要調(diào)整數(shù)據(jù)延遲值(使用延遲鏈電路),從而確保跨時(shí)鐘域數(shù)據(jù)傳遞時(shí)可以進(jìn)行正確采樣。
這種機(jī)制與使用FIFO或者握手機(jī)制相比具有更小的延遲。例如,DDR數(shù)據(jù)總線上可以使用單倍的時(shí)鐘實(shí)現(xiàn)雙倍的數(shù)據(jù)傳輸。前面講過的數(shù)據(jù)位寬調(diào)整電路,也要求雙方的時(shí)鐘頻率和相位具有間定、明確的關(guān)系。
準(zhǔn)同步時(shí)鐘域
如果兩個(gè)時(shí)鐘具有相同的標(biāo)稱頻率和指定范圍內(nèi)的時(shí)鐘精度誤差,那么我們說這兩個(gè)時(shí)鐘源是準(zhǔn)同步的。在實(shí)際應(yīng)用中,通常數(shù)據(jù)發(fā)送端的本地時(shí)鐘和接收端的本地時(shí)鐘是獨(dú)立產(chǎn)生的,通常都使用晶體振蕩器這類高精度時(shí)鐘源,二者往往具有相同的標(biāo)稱值和規(guī)定范圍內(nèi)的精度誤差。
例如,PCIe要求發(fā)送和接收時(shí)鐘誤差在300ppm以內(nèi)。這就意味著在一個(gè)相對(duì)較長的時(shí)間里(例如,對(duì)PCIe來說,超過1300個(gè)時(shí)鐘周期),兩個(gè)時(shí)鐘將產(chǎn)生1個(gè)時(shí)鐘周期的偏差。下面我們將討論此時(shí)如何進(jìn)行數(shù)據(jù)傳輸同步。
PCIe,SATA等串行通信協(xié)議中廣泛使用了準(zhǔn)同步通信機(jī)制。在數(shù)據(jù)收發(fā)電路中,彈性緩沖區(qū)(FIFO)被用于進(jìn)行跨時(shí)鐘域數(shù)據(jù)傳輸。此時(shí)FIFO不僅用于跨時(shí)鐘域的同步,還需要與一定的外部電路配合,解決長時(shí)間通信時(shí),由于時(shí)鐘偏差造成的FIFO內(nèi)部數(shù)據(jù)上溢或下溢的問題。PCIe和SATA要求發(fā)送端周期性地將null字符插入傳輸數(shù)據(jù)流中;在接收端,根據(jù)FIFO內(nèi)部的數(shù)據(jù)深度,這些null字符會(huì)被丟棄或添加到FIFO中。
-
usb
+關(guān)注
關(guān)注
60文章
7963瀏覽量
265262 -
fifo
+關(guān)注
關(guān)注
3文章
389瀏覽量
43770 -
Verilog
+關(guān)注
關(guān)注
28文章
1351瀏覽量
110187 -
HDL
+關(guān)注
關(guān)注
8文章
327瀏覽量
47416
原文標(biāo)題:Verilog HDL-同步技術(shù)
文章出處:【微信號(hào):Open_FPGA,微信公眾號(hào):OpenFPGA】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Verilog 與 ASIC 設(shè)計(jì)的關(guān)系 Verilog 代碼優(yōu)化技巧
Verilog與VHDL的比較 Verilog HDL編程技巧
數(shù)字系統(tǒng)設(shè)計(jì)與Verilog HDL
Verilog硬件描述語言參考手冊(cè)
Verilog HDL的基礎(chǔ)知識(shí)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論