 淺述基于超聲波傳感器的仿真測試
淺述基于超聲波傳感器的仿真測試
測試需求
自21世紀初以來,超聲波傳感器已被廣泛應用于汽車,為駕駛員提供障礙物距離信息的反饋。這一領域的發展方興未艾,現在這些傳感器也是自動泊車應用中的關鍵傳感組件。由于超聲波傳感器的數量、安裝位置、物理形狀、油漆顏色不一和超聲波特性的變化,使其測試變得比較困難。然而,超聲波傳感器不僅能夠收集信息,有助于實現近場監控的感知融合,還在實現L3、L4和L5級自動駕駛方面發揮著重要作用,因此需要進行徹底的測試。
dSPACE開發了一個測試系統,即超聲波傳感器測試系統 (Lab),通過OTA方式激勵超聲波傳感器。系統在運行時不需要任何運動組件。被測設備(DUT)可以進行黑盒測試, 并結合dSPACE ASM 超聲波傳感器模型實現動態測試,該模型通過射線計算仿真虛擬環境中的障礙物檢測。
這個系統還可以與其它dSPACE仿真選項(如攝像頭和雷達)結合使用。
左右滑動
系統概述
超聲波傳感器測試系統 (Lab)通常由運行ASM 車輛動力學和交通場景模型的實時SCALEXIO處理單元、執行dSPACE收發器底層信號處理的高性能FPGA板卡和讀取ECU輸出的通信網絡組成。
在DUT傳感器和ECU之間無需信號破解或修改,這意味著通信協議不必開放,DUT系統可被視為黑盒進行測試。
當DUT傳感器發射超聲波脈沖包進行距離測量時,脈沖包由dSPACE收發器捕獲后處理。經過與仿真距離成比例的延時后,dSPACE收發器向DUT傳感器返回一個超聲波脈沖。
超聲波傳感器測試系統 (Lab)
測試系統提供獨立版本或集成在SCALEXIO定制化系統中。現有的dSPACE底盤硬件在環仿真機柜就可以擴展此汽車超聲波傳感器測試系統。
如果您想將ECU放置在機柜外部,為了方便起見,ECU通過安裝在機柜前面板的BNC接插件,經過內部走線與超聲波傳感器相連,從而便于電氣信號檢查。
即使尺寸僅為555 x 560 x 340 mm,此dSPACE超聲波測試系統也支持多達12個傳感器。
dSPACE接收器和信號發生器通過OTA(over the air)方式與真實的超聲波泊車傳感器連接,超聲波傳感器借助于傳感器夾固定,并與外部干擾隔離。而dSPACE實時系統與超聲波傳感器測試系統(Lab)是相對獨立的。
軟件概述
在dSPACE實時系統上運行的程序包括兩個部分:SCALEXIO Processing Unit及FPGA應用。
SCALEXIO Processing Unit運行ASM超聲波傳感器模型、ASM 交通模型以及與FPGA應用通訊的接口模型。
FPGA應用程序包含底層邏輯,即I/O的接口。不包含有關測量周期和模式的信息。
處理單元和FPGA板卡之間的接口主要用于對FPGA應用程序進行參數化,監控FPGA的底層信號以及計算得到的超聲波特性,如頻率。
ASM 超聲波傳感器模型的特點
ASM超聲波傳感器模型提供了真實的回波計算,用于OTA仿真。同一個模型也可基于軟件在環仿真進行測試和算法開發,為客戶提供不同開發階段間無縫集成的解決方案。該模型通過計算優化,可直接在SCALEXIO Processing Unit實時運行,而不需要使用額外的GPU。
傳感器模型提供了許多特性,以盡可能接近真實世界的行為。其特點包括:
1. 逼真且易于參數化的識別對象
ASM 超聲波傳感器模型的識別對象逼真且易于參數化。其由輪廓線及其高度來定義,具備六個自由度,可以用于任何場景。
2. 直接和間接(交叉)回波
對于直接回波,使用同一個傳感器進行超聲波的發送和接收。對于間接回波(通常稱為交叉回波),回波的發送者和接收者是不同的。間接回波為ECU提供附加信息,因此通常需要有效檢測。ASM超聲波傳感器模型計算每個傳感器的直接和間接回波。
3. 多次回波
現代超聲波傳感器可以檢測和處理來自一個或多個物體的多次回波。ASM超聲波傳感器為每個對象以及每個發送周期的多個對象提供真實的多次回波。
FPGA應用的自由度
基于FPGA的應用,dSPACE系統可以仿真真實回波的四個屬性參數:
飛行時間(ToF)
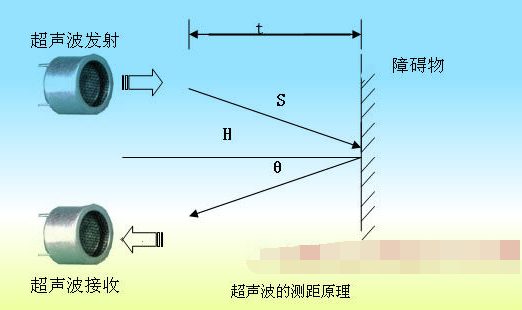
超聲波測距是基于波傳播時間的。波來回傳播的時間與距離成正比。環境條件,特別是溫度,會影響空氣中的波速,可將其作為影響因子引入到動態模型(仿真)的距離計算中,或使用溫箱(物理)方案。
振幅
根據障礙物的位置、角度和特性,一部分能量反射后會被DUT傳感器檢測到,另外的能量要么被吸收,要么被反射到其他方向。對回波振幅的操作提供了仿真真實回波情況的可能性。
頻率
基于FPGA應用,支持典型汽車應用范圍內的固定和調制頻率。
脈沖數
DUT傳感器檢測到的波的脈沖數可能會變化,借助于FPGA的應用可以仿真這一特性。
系統運行時,頻率和脈沖數可能無法實時操作。
應用示例:停車位測量(PSM)
超聲波傳感器測試系統(Lab)和ASM超聲波傳感器模型的眾多應用之一是停車位檢測(PSM)系統的驗證。這一系統測量縱向或橫向停車位的寬度,并啟動停車操作。這樣的場景可以通過dSPACE ModelDesk進行定義,也可以用dSPACE MotionDesk和dSPACE ControlDesk實現實時可視化。超聲波傳感器測試系統(Lab)根據模型實時計算的動態回波行為,對DUT超聲波傳感器進行激勵。
左右滑動
當DUT傳感器的距離測量被觸發時,dSPACE傳感器會捕捉并分析波形的特性,如頻率和振幅。同時,啟動計時器,當飛行時間達到ASM 超聲波傳感器模型計算的回波距離對應的時間時,dSPACE信號發生器會觸發一個特性匹配的回波信號。
優點
dSPACE 超聲波傳感器測試系統(Lab)和ASM 超聲波傳感器模型有機結合之后,能夠通過OTA方式對各種場景進行精確且可復現的仿真和測試。將ASM超聲波傳感器模型集成到dSPACE工具鏈中,可以方便直觀地對場景進行參數化,并在MotionDesk中實現生動的可視化。
超聲波傳感器測試系統(Lab)提供了一個解決方案,用于測試真正的泊車ECU和超聲波傳感器,并且無需破解或移動組件,能夠輕松集成到現有系統中。測試系統尺寸緊湊,既可以獨立使用,也可以作為一個組件集成到全尺寸系統中。針對多傳感器融合的ADAS/AD應用測試,也可在此基礎上擴展其他dSPACE傳感器仿真選項,例如攝像頭、激光雷達和雷達。
編輯:jq
-
ecu
+關注
關注
14文章
890瀏覽量
54604 -
OTA
+關注
關注
7文章
583瀏覽量
35310 -
超聲波傳感器
+關注
關注
18文章
584瀏覽量
35960
原文標題:超聲波傳感器的仿真測試
文章出處:【微信號:dSPACE_100,微信公眾號:dSPACE】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
倍加福發布USi-industry超聲波傳感器系統
超聲波傳感器是模擬還是數字
超聲波傳感器輸出的是什么信號
單片機如何使用超聲波傳感器進行距離測量
解讀工業機器人避障常用的視覺傳感器、激光傳感器、紅外傳感器、超聲波傳感器







 工商網監
工商網監
評論