 在 LIN 和 CAN 之間選擇
在 LIN 和 CAN 之間選擇
在使用低功耗Bluetooth? 技術的汽車被動進入被動啟動 (PEPS)系統中,司機使用與汽車門禁系統通信的密鑰卡(而不是鑰匙)上車和啟動電機(或引擎,如有內燃機)。
圖 1 所示為車內低功耗藍牙 PEPS 的典型架構。該架構中有一個中央智能鑰匙模塊和九個衛星模塊。此處所示的九個衛星模塊僅為示例,在實際應用中,衛星模塊的數量可能更多或更少。圖 1 還顯示了這些模塊通過使用通信總線進行通信。
衛星節點內部
那么衛星節點內部是什么?圖 2 所示為低功耗藍牙衛星模塊的典型方框圖。該模塊有一個低功耗藍牙片上系統 (SoC)(如 TI 的 SimpleLink?CC2640R2F-Q1)、一個電源和一個通信接口(通常為收發器)。圖 2 還顯示了 PEPS 系統內的其他模塊,包括智能鑰匙模塊,甚至車身控制模塊。
通信總線選項
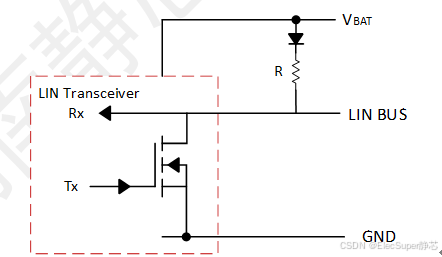
汽車 PEPS 系統中兩個明顯的通信總線架構分別是本地互聯網絡 (LIN) 和控制器局域網 (CAN);控制器局域網可以是經典 CAN 或 CAN 靈活數據速率 (CAN FD)。LIN 和 CAN 均為汽車應用中廣泛使用的標準通信協議。LIN 通信系統的最大波特率為 19.2Kbps。經典 CAN 為 1Mbps,CAN FD 可高達 5Mbps。
LIN 和 CAN 均將報文幀作為建立通信協議的基礎,二者均可傳送最多 8 個數據字節。具有 8 個數據字節的 LIN 報文幀長度為 124 位,而標準 CAN 幀或 CAN 2.0 幀(包括幀間間隔和假設最壞情況下的位填充)的報文幀為 135 位。因此,LIN 報文幀的傳輸時間是 6.46ms,而標準 CAN 報文幀僅用 135μs 進行傳輸。
在 LIN 和 CAN 之間選擇
計算顯示,LIN 報文幀比 CAN 幀所用的時間更長。因此,您可能認為速度越快越好,并選擇 CAN 總線。然而,CAN 總線是雙線通信總線,而 LIN 總線是單線通信總線。這意味著基于 CAN 總線的系統比使用 LIN 總線的系統更昂貴,也就是說 CAN 總線可能不是最佳選擇。
如何在兩種協議間做選擇呢?一種方法是分析需要傳輸的字節總數。如果低功耗藍牙芯片在衛星節點使用計算算法,那么需要傳輸的字節數會較少,因此,LIN 通信足以應對。另一方面,若低功耗藍牙芯片沒有執行任何計算,僅傳輸所有測量的原始數據,那么需要傳輸的字節會更多,此時需要 CAN 架構。
另一個考慮因素是功耗。在所有運行模式中,通常 LIN 總線節點比 CAN 總線節點的功耗低。具體的功耗值可在各自的收發器數據表中找到。
示例應用
TI 的汽車低功耗藍牙門禁衛星節點參考設計展示了基于 LIN 的衛星板的應用。該參考設計將 TI 的CC2640R2F-Q1用作低功耗藍牙 SoC,將TLIN1029-Q1用作 LIN 總線收發器。
必須在智能鑰匙模塊和低功耗藍牙衛星模塊間交換大量數據時,經典 CAN 或 CAN FD 總線架構是一個顯而易見的選擇。您可以利用集成了 CAN FD 控制器和收發器的 TI 全新TCAN4550-Q1系統基礎芯片 (SBC),輕松地向衛星節點添加 CAN 通信功能。除了集成控制器和收發器,SBC 還具有自供電功能,也就是無需額外的供電設備。SBC 提供電壓源,為印刷電路板中的額外組件供電,還具有可用作 SoC 監控器的看門狗計時器。
圖 3 展示了能夠充分利用TCAN4550-Q1器件功能的衛星節點實施方式。
在圖 3 中,TCAN4550-Q1的 5V 輸出用作TLV733P-Q1低輸入電壓線性穩壓器的輸入。該穩壓器產生CC2640R2F-Q1低功耗藍牙 SoC 所需的 3.3V 電壓,使得寬輸入電壓穩壓器無需向低功耗藍牙 SoC 供電。請注意,3.3V 穩壓器輸出還用作TCAN4550-Q1 的 VIO,因此無需在低功耗藍牙 SoC 和TCAN4550-Q1 之間設置電壓電平轉換器。TCAN4550-Q1中的看門狗計時器還能監控低功耗藍牙 SoC 軟件的執行。因此高度集成的 SBC 能為低功耗藍牙衛星節點提供成本優化型解決方案。
結論
設計工程師目前正在使用低功耗藍牙技術實施新一代汽車 PEPS 系統。當設計師攻克滿足 PEPS 要求所需最佳節點數的挑戰時,通信總線架構在解決方案中起著重要作用。設計師可選擇 LIN 或 CAN 進行通信。TI 的 LIN 收發器和新推出的TCAN4550-Q1SBC 以及低功耗藍牙 SoC 和電源管理器件,不僅能提供完整的器件產品組合供您選擇,還能為汽車平臺靈活制定最優解決方案。
審核編輯:何安
-
汽車
+關注
關注
13文章
3583瀏覽量
37524
發布評論請先 登錄
相關推薦

CAN總線通信原理介紹 CAN總線模塊選擇指南
CAN總線與LIN總線的區別
如何選擇CAN總線控制器
【技術分享】汽車電子之LIN協議

Lin總線的定義以及靜電保護方案

思瑞浦車規級產品矩陣,全面覆蓋汽車級CAN&amp;LIN、LDO需求

LIN接口靜電放電防護方案
芯力特車規TVS產品助力CAN/LIN通訊接口保護

can高和can低之間的電阻怎么測量
什么是LIN收發器?它有哪些特性?
教你如何選擇合適的CAN隔離器?
虹科提供了一種高效、可靠的汽車CAN/LIN總線數據采集解決方案






 工商網監
工商網監
評論