 擁抱自動駕駛,4D成像毫米波雷達已悄然崛起!
擁抱自動駕駛,4D成像毫米波雷達已悄然崛起!
擁抱自動駕駛,4D成像毫米波雷達已悄然崛起!
電子發燒友網報道(文/李誠)在汽車領域,自動駕駛是汽車智能化發展的最終方向。毫米波雷達傳感器是目前汽車領域最成熟的技術之一,也是使用頻率較高的一種傳感器。隨著自動駕駛等級的不斷提高,對傳感器的探測精度提出了更高的要求,更高精度的4D成像毫米波雷達也因此應運而生。
2020年,德國大陸汽車推出的ARS540正式將4D成像毫米波雷達帶入大眾視野。并且4D成像毫米波雷達也乘著自動駕駛的東風,在汽車產業中悄然崛起。
4D成像毫米波雷達存在什么優勢?
4D成像毫米波雷達與傳統毫米波雷達相比,最直觀的優勢在于4D成像毫米波雷達在原有的基礎上新增了高度感知的能力,這也就意味著4D毫米波雷達的感知能力由原本的三維平面感知(距離、水平、速度)提升至了四維立體空間感知(距離、水平、垂直、速度)。

圖源:NXP
之所以在4D毫米波雷達中加入“成像”二字,是因為高度感知能力能夠更好地解析所探測到障礙物的輪廓、類別以及行為,而傳統的毫米波雷達并不具備縱向空間的感知能力,只能探測到地面的障礙物,但并不能確定該障礙物是否向高處延伸,更不能判斷障礙物的行為。
因此在自動駕駛應用中,使用傳統的毫米波雷達無法細化不同的剎車場景。
在成本方面,目前很多汽車廠商都以激光雷達作為汽車的賣點進行宣傳,甚至出現了相互攀比激光雷達使用數量的現象。雖然激光雷達的探測精度比4D毫米波雷達更高,但目前還屬于激光雷達的初期發展階段,存在技術不夠成熟、成本高等問題。
此前就有媒體報道,目前最便宜的激光雷達一臺也需要數千元人民幣,高線數的激光雷達價格甚至達到了萬元級,而據Arbe透露的信息稱,其4D毫米波雷達的價格僅在100-150美元之間,定位在千元級別。
同時,4D毫米波雷達與傳統的毫米波雷達在原理上存在較多的產品共性,因此與攝像頭搭配使用時,數據融合的難度也相對較低,進而降低了一定的產品的驗證成本。
NXP 16nm 4D成像雷達處理器
處于汽車半導體技術前沿的NXP,近日在CES上共發布了兩款面向L2+至L5自動駕駛應用的4D成像雷達處理器S32R41和S32R45。據悉,這兩款芯片具備6個角度、360°環繞視角的數據處理能力。其中這兩款芯片均采用的是16nm工藝,目前已進入投產階段,按計劃預計在今年上半年實現首批產品的交付。

圖源:NXP
據NXP官網的預測顯示,預計到2030年,將會有接近半數的汽車產能均為L2+自動駕駛汽車。NXP也預見了未來L2+這一細分賽道龐大的市場,專為L2+自動駕駛應用量身打造了一款更具優勢的4D成像雷達處理器S32R41。該處理器通過超高分辨率算法,可以很好地對六個方位角、360°環繞檢測的大量數據進行處理,通過專用芯片搶占L2 +細分市場。
而S32R45覆蓋的自動駕駛等級應用相較于S32R41更廣,可滿足L2+至L5自動駕駛應用。S32R45采用了4個800 MHz的Arm Cortex-A53 和3個400 MHzArm?Cortex?-M7內核的32位汽車雷達微處理器單元(MPU),通過高性能的MPU可以很好地為高分辨率的遠程探測雷達提供高分辨率的成像功能。
S32R41和S32R45均采用了通用的軟件開發架構,以及高性能硬件安全引擎、支持OTA 更新、符合最新網絡安全標準。
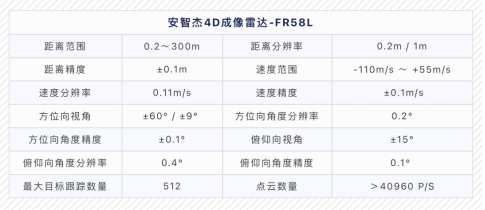
安智杰4D成像毫米波雷達
安智杰于去年12月正式上線了新一代的4D成像毫米波雷達FR58L,憑借著過硬的技術優勢,其新上線的4D成像毫米波雷達具有精準的信號采集能力和目標識別能力,能夠為智能出行精準賦能,推動了自動駕駛的發展。
據悉,安智杰新一代的4D毫米波雷達采用的是硅基的COMS射頻前端芯片,在信號處理方面采用的是FPGA作為雷達信號源的高速處理中心。為提高數據處理的運算能力,安智杰還加高了容量的高速緩存,通過高計算帶寬、高容量存儲和高容量帶寬提升系統的算力。
在數據傳輸方面,采用了高傳輸速率的多通道CAN-FD作為通信接口,進一步提升雷達數據的傳輸速率,增強4D毫米波雷達的數據采集精度,為L3提供更準確的環境感知信息作為支撐。
同時,FR58L還在5個技術層面實現了新的突破,分別為:陣列綜合技術、恒虛警技術、超分技術、目標追蹤技術以及AI技術。陣列綜合技術主要就是通過提高動態范圍降低普遍存在高虛警和弱目標淹沒的問題;恒虛警技技術主要是通過安智杰獨有的恒虛警檢測算法,提升雷達在密集型應用場景中的檢測能力;超分技術是通過子空間擬合類算法將孔徑的角度分辨能力提升至原有的4至6倍,再通過信號源估計算法加以輔助實現的;目標追蹤技術主要是通過引入多普勒觀測的IMM-JIPDA與UKF技術,剔除航跡預選波門中的雜波觀測,修正航跡質量以改進真實目標與虛假航跡的甄別;AI技術主要就是為了提升4D毫米波雷達的多場景適應能力。
圖源:安智杰
上圖為FR58L的詳細參數,其中FR58L的探測范圍覆蓋了0.2m~300m,0.2m的近距離探測能力能夠有效地降低因視線問題造成的盲區,進一步提升行車安全。同時大于40960 P/S的點云數量能夠很好地將毫米波雷達探測到的目標輪廓成像得更為清晰,有利于為自動駕駛提供更高精度的定位、地圖實時構建與可通行空間估測等自動駕駛功能,進而提升車輛對周圍環境的感知性能。
結語
4D成像毫米波雷達高精度的目標偵測、追蹤以及可通行空間評估、車輛定位和實時地圖構建等功能無論在成本還是其他方面都不輸傳統的攝像頭、毫米波雷達、紅外成像等傳感器,甚至可以與目前備受看好的激光雷達一比高低。在傳統雷達向激光雷達過渡階段,4D成像毫米波雷達有望挑起汽車自動駕駛的大梁。
電子發燒友網報道(文/李誠)在汽車領域,自動駕駛是汽車智能化發展的最終方向。毫米波雷達傳感器是目前汽車領域最成熟的技術之一,也是使用頻率較高的一種傳感器。隨著自動駕駛等級的不斷提高,對傳感器的探測精度提出了更高的要求,更高精度的4D成像毫米波雷達也因此應運而生。
 ?
?2020年,德國大陸汽車推出的ARS540正式將4D成像毫米波雷達帶入大眾視野。并且4D成像毫米波雷達也乘著自動駕駛的東風,在汽車產業中悄然崛起。
4D成像毫米波雷達存在什么優勢?
4D成像毫米波雷達與傳統毫米波雷達相比,最直觀的優勢在于4D成像毫米波雷達在原有的基礎上新增了高度感知的能力,這也就意味著4D毫米波雷達的感知能力由原本的三維平面感知(距離、水平、速度)提升至了四維立體空間感知(距離、水平、垂直、速度)。
圖源:NXP
之所以在4D毫米波雷達中加入“成像”二字,是因為高度感知能力能夠更好地解析所探測到障礙物的輪廓、類別以及行為,而傳統的毫米波雷達并不具備縱向空間的感知能力,只能探測到地面的障礙物,但并不能確定該障礙物是否向高處延伸,更不能判斷障礙物的行為。
因此在自動駕駛應用中,使用傳統的毫米波雷達無法細化不同的剎車場景。
在成本方面,目前很多汽車廠商都以激光雷達作為汽車的賣點進行宣傳,甚至出現了相互攀比激光雷達使用數量的現象。雖然激光雷達的探測精度比4D毫米波雷達更高,但目前還屬于激光雷達的初期發展階段,存在技術不夠成熟、成本高等問題。
此前就有媒體報道,目前最便宜的激光雷達一臺也需要數千元人民幣,高線數的激光雷達價格甚至達到了萬元級,而據Arbe透露的信息稱,其4D毫米波雷達的價格僅在100-150美元之間,定位在千元級別。
同時,4D毫米波雷達與傳統的毫米波雷達在原理上存在較多的產品共性,因此與攝像頭搭配使用時,數據融合的難度也相對較低,進而降低了一定的產品的驗證成本。
NXP 16nm 4D成像雷達處理器
處于汽車半導體技術前沿的NXP,近日在CES上共發布了兩款面向L2+至L5自動駕駛應用的4D成像雷達處理器S32R41和S32R45。據悉,這兩款芯片具備6個角度、360°環繞視角的數據處理能力。其中這兩款芯片均采用的是16nm工藝,目前已進入投產階段,按計劃預計在今年上半年實現首批產品的交付。
圖源:NXP
據NXP官網的預測顯示,預計到2030年,將會有接近半數的汽車產能均為L2+自動駕駛汽車。NXP也預見了未來L2+這一細分賽道龐大的市場,專為L2+自動駕駛應用量身打造了一款更具優勢的4D成像雷達處理器S32R41。該處理器通過超高分辨率算法,可以很好地對六個方位角、360°環繞檢測的大量數據進行處理,通過專用芯片搶占L2 +細分市場。
而S32R45覆蓋的自動駕駛等級應用相較于S32R41更廣,可滿足L2+至L5自動駕駛應用。S32R45采用了4個800 MHz的Arm Cortex-A53 和3個400 MHzArm?Cortex?-M7內核的32位汽車雷達微處理器單元(MPU),通過高性能的MPU可以很好地為高分辨率的遠程探測雷達提供高分辨率的成像功能。
S32R41和S32R45均采用了通用的軟件開發架構,以及高性能硬件安全引擎、支持OTA 更新、符合最新網絡安全標準。
安智杰4D成像毫米波雷達
安智杰于去年12月正式上線了新一代的4D成像毫米波雷達FR58L,憑借著過硬的技術優勢,其新上線的4D成像毫米波雷達具有精準的信號采集能力和目標識別能力,能夠為智能出行精準賦能,推動了自動駕駛的發展。
據悉,安智杰新一代的4D毫米波雷達采用的是硅基的COMS射頻前端芯片,在信號處理方面采用的是FPGA作為雷達信號源的高速處理中心。為提高數據處理的運算能力,安智杰還加高了容量的高速緩存,通過高計算帶寬、高容量存儲和高容量帶寬提升系統的算力。
在數據傳輸方面,采用了高傳輸速率的多通道CAN-FD作為通信接口,進一步提升雷達數據的傳輸速率,增強4D毫米波雷達的數據采集精度,為L3提供更準確的環境感知信息作為支撐。
同時,FR58L還在5個技術層面實現了新的突破,分別為:陣列綜合技術、恒虛警技術、超分技術、目標追蹤技術以及AI技術。陣列綜合技術主要就是通過提高動態范圍降低普遍存在高虛警和弱目標淹沒的問題;恒虛警技技術主要是通過安智杰獨有的恒虛警檢測算法,提升雷達在密集型應用場景中的檢測能力;超分技術是通過子空間擬合類算法將孔徑的角度分辨能力提升至原有的4至6倍,再通過信號源估計算法加以輔助實現的;目標追蹤技術主要是通過引入多普勒觀測的IMM-JIPDA與UKF技術,剔除航跡預選波門中的雜波觀測,修正航跡質量以改進真實目標與虛假航跡的甄別;AI技術主要就是為了提升4D毫米波雷達的多場景適應能力。
圖源:安智杰
上圖為FR58L的詳細參數,其中FR58L的探測范圍覆蓋了0.2m~300m,0.2m的近距離探測能力能夠有效地降低因視線問題造成的盲區,進一步提升行車安全。同時大于40960 P/S的點云數量能夠很好地將毫米波雷達探測到的目標輪廓成像得更為清晰,有利于為自動駕駛提供更高精度的定位、地圖實時構建與可通行空間估測等自動駕駛功能,進而提升車輛對周圍環境的感知性能。
結語
4D成像毫米波雷達高精度的目標偵測、追蹤以及可通行空間評估、車輛定位和實時地圖構建等功能無論在成本還是其他方面都不輸傳統的攝像頭、毫米波雷達、紅外成像等傳感器,甚至可以與目前備受看好的激光雷達一比高低。在傳統雷達向激光雷達過渡階段,4D成像毫米波雷達有望挑起汽車自動駕駛的大梁。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
毫米波雷達
+關注
關注
107文章
1044瀏覽量
64367
發布評論請先 登錄
相關推薦
康謀技術 | 高效環境感知:毫米波雷達數據采集、可視化及存儲方案
自動駕駛技術飛速發展,毫米波雷達因其出色性能已成為自動駕駛傳感器套件的關鍵!本文以4D毫米波


正和微芯發布4D毫米波雷達SoC芯片RS6240
近日,珠海正和微芯科技有限公司在智能化領域投下了一顆震撼彈——正式發布了其自主研發的RS6240芯片,一款集低功耗、抗干擾、遠距離及4D成像能力于一身的毫米波雷達SoC芯片。這一創新成
恩智浦展示汽車毫米波雷達最新解決方案
憑借全天候的工作能力、較遠的探測距離、小型化等優點,毫米波雷達已經成為智能汽車感知層不可或缺的賦能技術。伴隨著ADAS和自動駕駛向L2+及更高級別邁進,毫米波
行易道與韓國自動駕駛公司簽署技術開發協議
2024年6月,北京行易道科技有限公司正式與韓國自動駕駛公司簽署技術開發協議,共同開發基于4D成像毫米波雷達為主傳感器的
加特蘭毫米波雷達SoC家族再進化,為全球市場提供高性能雷達解決方案
成像雷達研發新范式 ? 汽車ADAS技術不斷發展,傳統車載3D毫米波雷達向著4D化、
發表于 06-11 11:43
?3292次閱讀

華域汽車電子分公司攜手Uhnder開發新一代4D數字成像雷達
? 近日,華域汽車電子分公司與美國數字成像雷達芯片和解決方案供應商Uhnder公司達成協議,雙方擬就新一代4D毫米波成像
發表于 06-07 10:12
?3486次閱讀
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
模態精準感知信息,使自動駕駛系統可以實時精準地感知道路上的各種狀況。
昱感微融合感知產品方案創新性地 將可見光攝像頭、紅外攝像頭以及4D毫米波雷達的探測數據在前端(數據獲取時)交互,
發表于 04-11 10:26

經緯恒潤4D成像毫米波雷達亮相 CES 2024
在剛剛結束的CES2024上,經緯恒潤聯合以色列ArbeRobotics公司展出了基于Arbe芯片組方案的4D成像毫米波雷達LRR610。經緯恒潤自主研發的


中央域控雷達:4D雷達新時代
Ambarella成立于2004年,是一家專注于視頻芯片技術的公司,2021年收購了4D毫米波雷達算法公司傲酷(Oculii)。首次引入4D成像

行易道發布4D毫米波成像多雷達實時環視SLAM系統
北京行易道科技有限公司(簡稱其為行易道科技)在北京的總部舉辦了一場別開生面的新聞發布會。在這次發布會上,行易道科技驕傲地推出了一款創新性產品 - 4D毫米波成像多雷達實時環視SLAM系





 工商網監
工商網監
評論