 基于Vitis HLS的加速圖像處理
基于Vitis HLS的加速圖像處理
1、unified2020.1
linux ubuntu18.04.2
推薦文檔鏈接:
https://xilinx.github.io/Vitis_Libraries/vision/2020.1/overview.html#hls...
https://forums.xilinx.com/t5/High-Level-Synthesis-HLS/Using-Vitis-Vision...
https://github.com/Xilinx/Vitis_Libraries
Vitis Vision庫是OpenCV和Vision功能的加速庫,可在Vitis環境中使用,這些庫的L1目錄是示例設計。為了適應各種用戶環境,從2020.1版本開始,Xilinx不再使用Vivado / Vitis工具提供預安裝的OpenCV版本。盡管Vitis_hls編譯Vision庫不需要OpenCV,但是用戶測試驗證使用時OpenCV。
2、linux下安裝opencv(opencv-3.4.12)
鏈接:https://opencv.org/releases/
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev libjpeg.dev libtiff4.dev
unzip opencv-3.4.12.zip
cd opencv-3.4.12
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DOPENCV_GENERATE_PKGCONFIG=ON -DCMAKE_INSTALL_PREFIX=/usr/local …
make -j8
sudo make install
ldconfig -p |grep opencv
sudo ldconfig -v
qt中測試,報錯 failed to load module “canberra-gtk-module”
sudo apt-get install libcanberra-gtk-module
3、在vitis library中 每個類別提供三種代碼
L1:最低級的代碼,旨在用高級綜合工具綜合后,可以在Vitis(邏輯)中實現這些功能,或將其用作新IP開發的一部分。
L2:中間級可以在Vitis中實現功能(邏輯)。不太懂也不關心!
L3:最高級提供了由多個加速內核創建的應用程序。不太懂也不關心!
4、在linux系統中測試
(1)復制L1/examples中的sobelfilter
(2)將build文件復制到文件夾(xf_config_params.h)這個文件存放的是濾波器的參數
(3)在data中輔助一個128x128的png圖像
(4)配置hls運行前的環境
source /settings64.sh
export OPENCV_INCLUDE=
export OPENCV_LIB=
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:
(5)在此終端打開vitis_hls
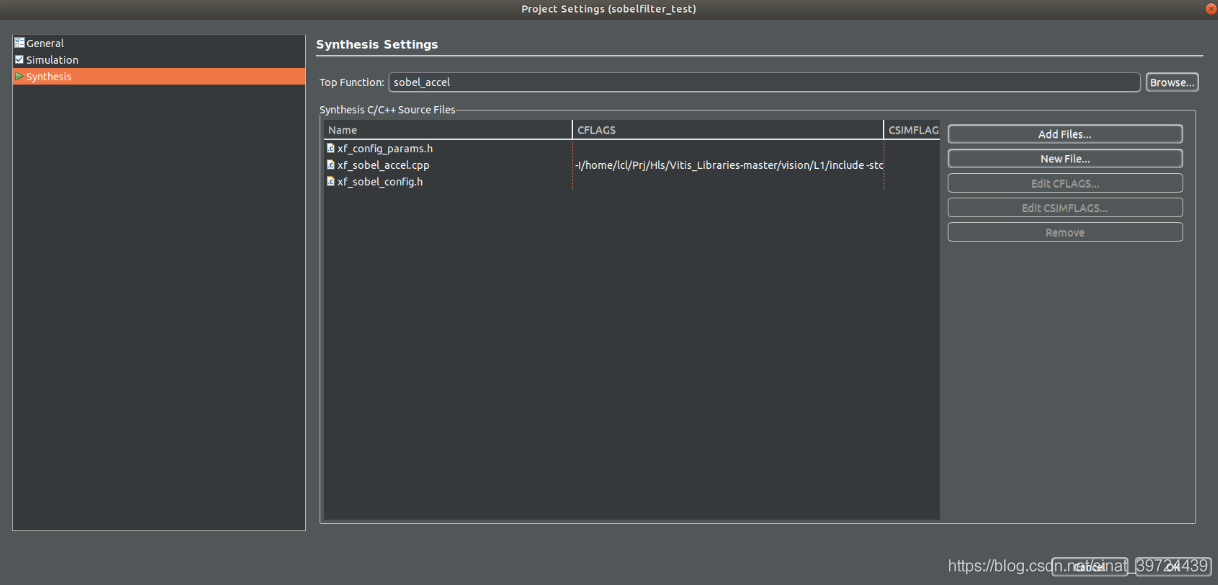
(6)新建hls工程
(7)添加源文件中所需的.cpp 和.h 并且在cflags中添加
-I
-std=c++0x(其他調用的.h文件的路徑,否則將頭文件復制到一個文件夾)
(8)在tb的cflags中添加
-I
-std=c++0x -I
(其他調用的.h文件的路徑,否則將頭文件復制到一個文件夾)
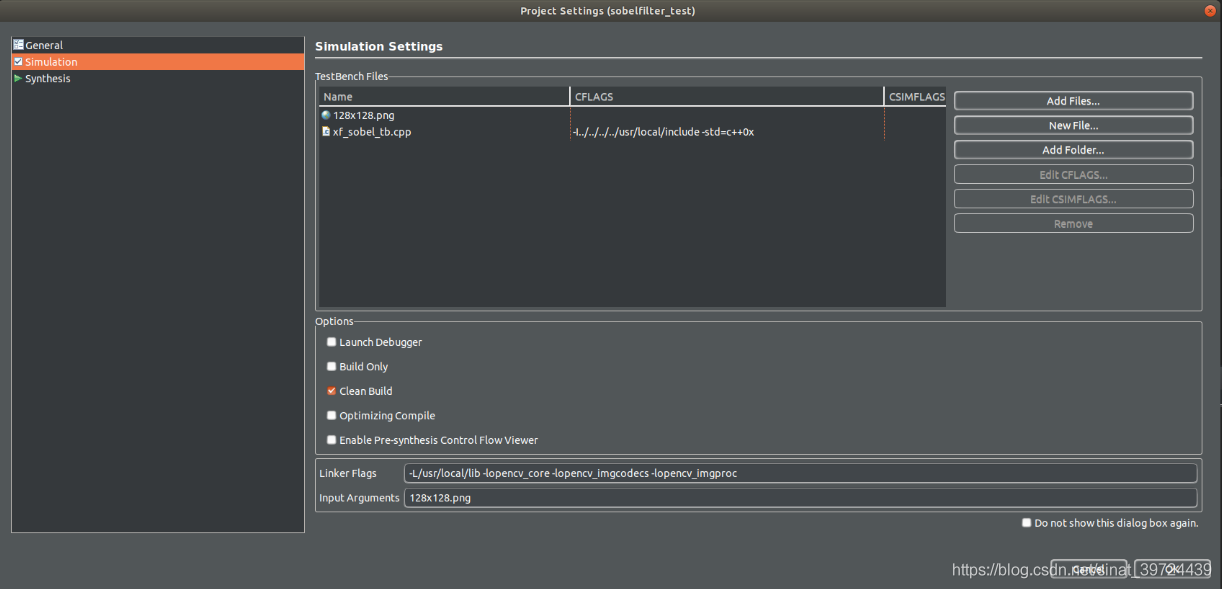
(9)在連接器 (linker flags)中添加
-L
-lopencv_core -lopencv_imgcodecs -lopencv_imgproc
(10)在輸入(input arguments)中輸入圖片名稱
(11)保存
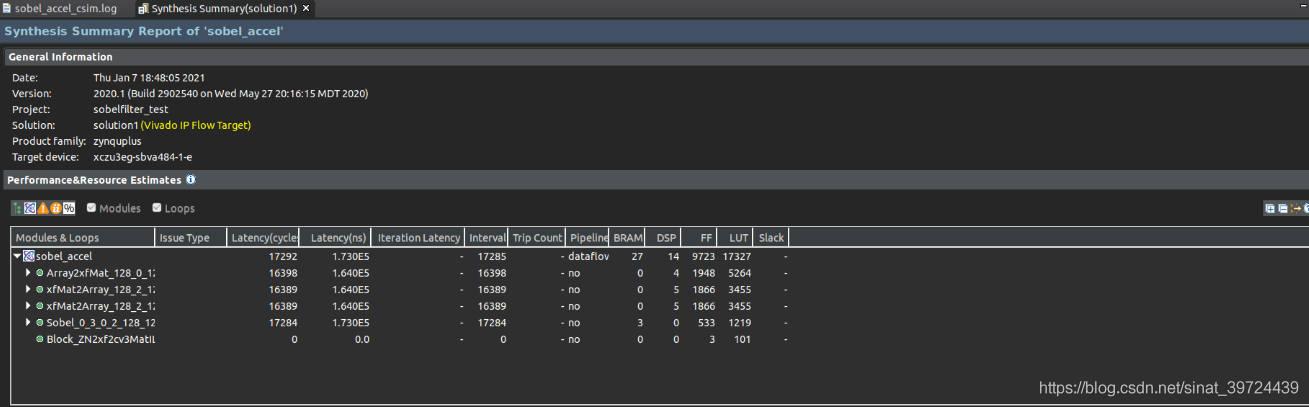
5、點擊綜合
6、點擊仿真
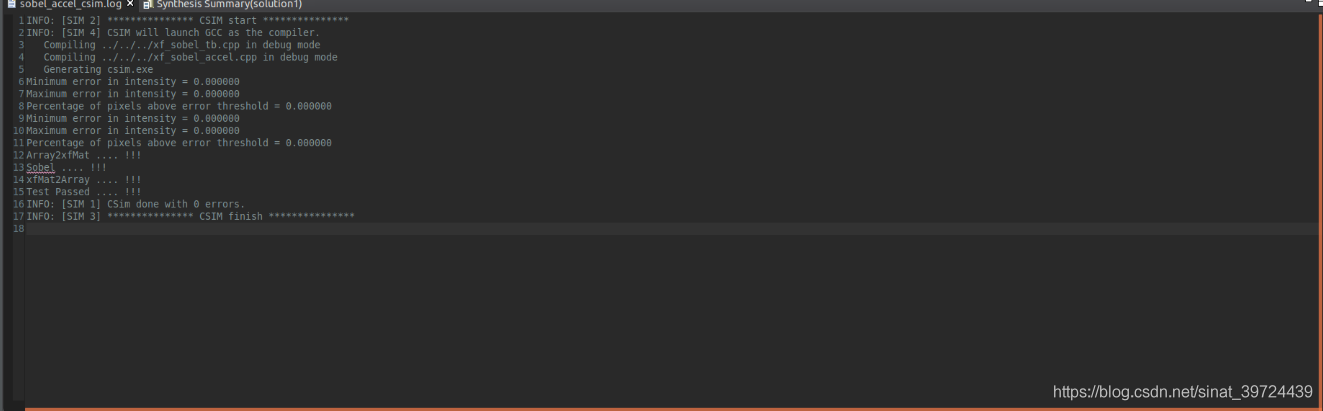
7、實驗現象
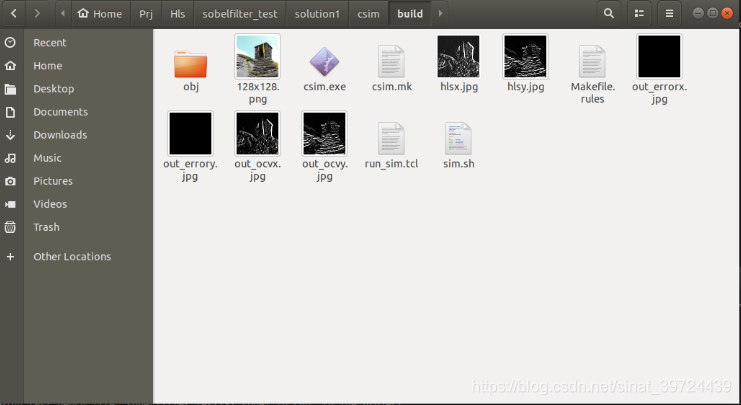
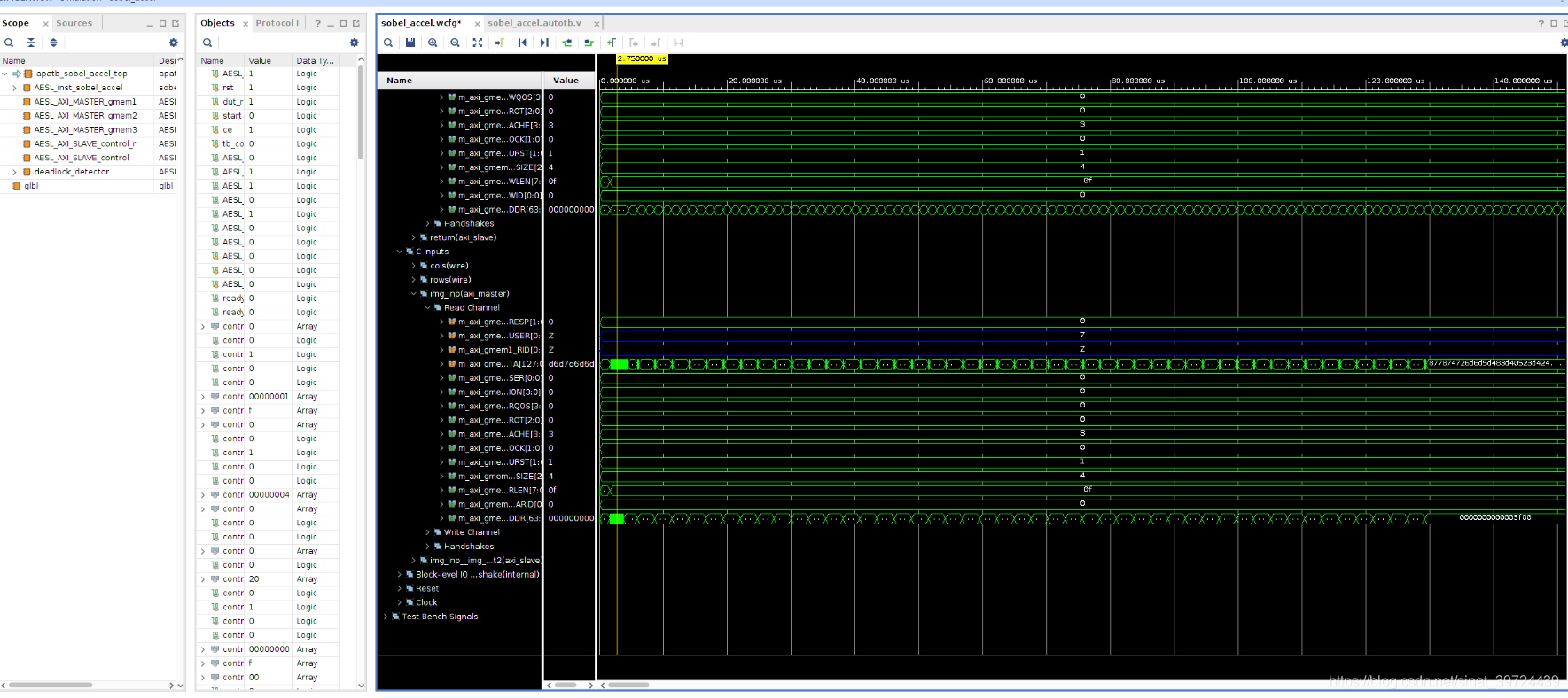
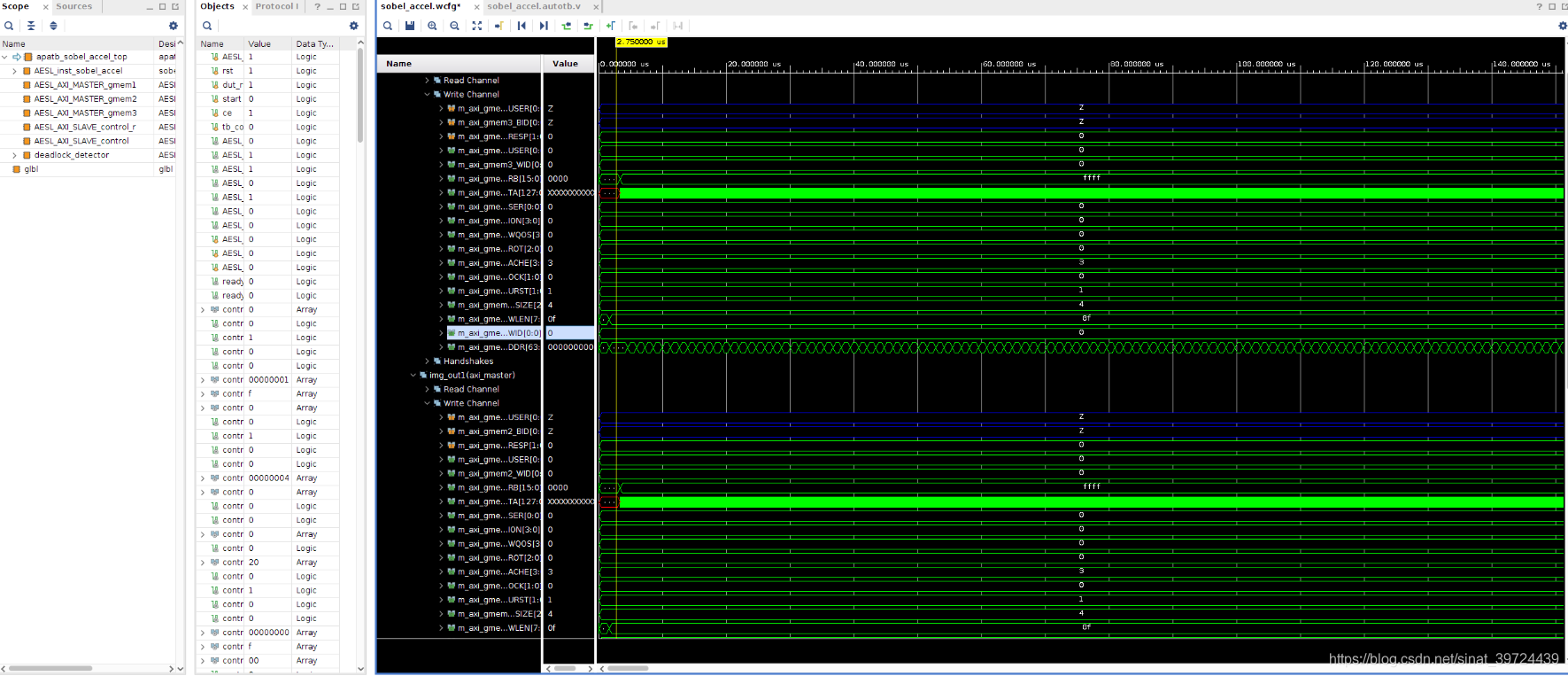
8、協同仿真

9、信號太多,挑模塊的輸入輸出即可,否則除非內存很大,不然會卡死。
輸入數據
輸出數據
審核編輯:符乾江
-
圖像處理
+關注
關注
27文章
1292瀏覽量
56747 -
Vitis
+關注
關注
0文章
146瀏覽量
7432
發布評論請先 登錄
相關推薦
基于FPGA實現圖像直方圖設計

助力AIoT應用:在米爾FPGA開發板上實現Tiny YOLO V4
AMD Vitis Unified Software Platform 2024.2發布
圖像處理器是什么意思
AMD Vitis?設計工具中的Libraries新功能介紹
基于FPGA的實時邊緣檢測系統設計,Sobel圖像邊緣檢測,FPGA圖像處理
在Windows 10上創建并運行AMD Vitis?視覺庫示例

FPGA版通用圖形處理架構創新解決方案
Vitis2023.2使用之—— updata to Vitis Unified IDE
Vitis2023.2使用之—— classic Vitis IDE

Vivado HLS的圖像傳感器FPN噪聲去除算法設計






 工商網監
工商網監
評論