 電機控制進階1——PID速度控制
電機控制進階1——PID速度控制
之前的幾篇文章(電機控制基礎篇),介紹的電機編碼器原理、定時器輸出PWM、定時器編碼器模式測速等。
本篇在前幾篇的基礎上,繼續來學習電機控制,通過PID算法,來進行電機的速度控制,并進行實驗測試。
PID基礎
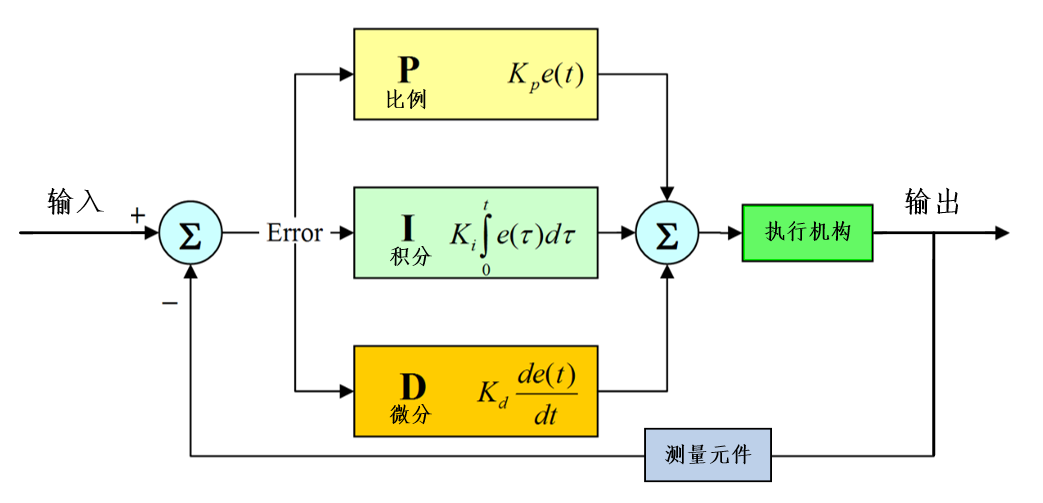
PID即:Proportional(比例)、Integral(積分)、Differential(微分)的縮寫。
PID是經典的閉環控制算法,具有原理簡單,易于實現,適用面廣,控制參數相互獨立,參數的選定比較簡單等優點。
凡是需要將某一個物理量“保持穩定”的場合(比如維持平衡,穩定溫度、轉速等),PID都會派上大用場。
PID算法分類
PID算法可分為位置式PID與增量式PID兩大類。
在實際的編程應用中,需要使用離散化的PID算法,以適用計算機的使用環境,下面以電機轉速控制為例,來看一下兩種PID算法的基本原理。
位置式PID
位置式PID是當前系統的實際位置,與想要達到的預期位置的偏差,進行PID控制
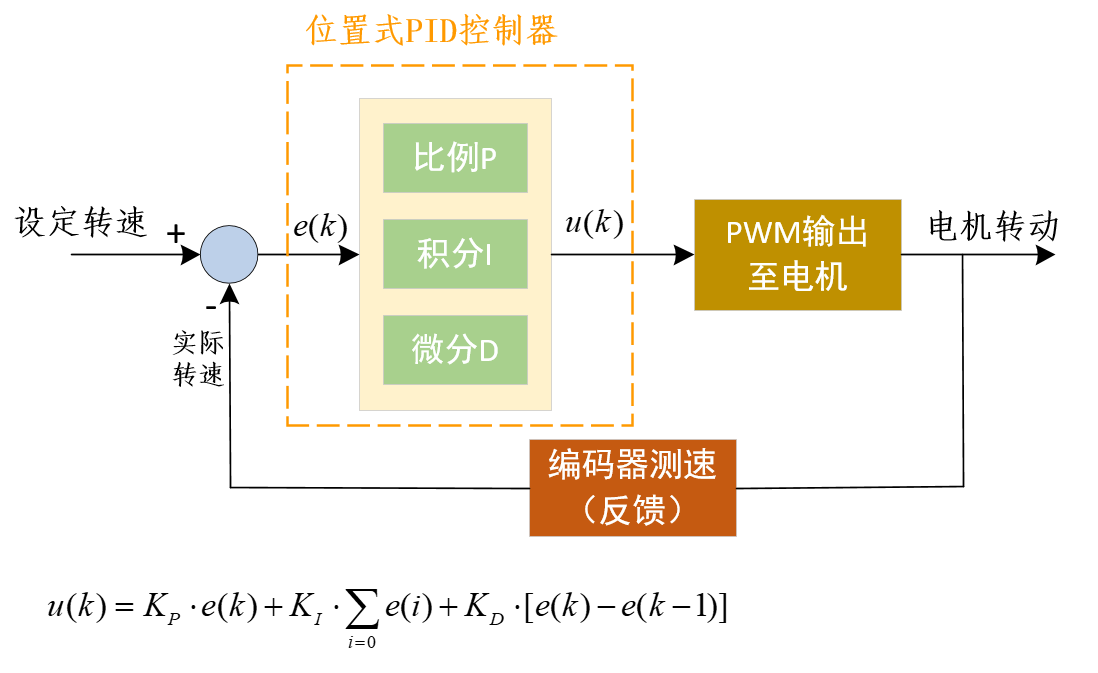
比例P:e(k) 此次誤差
積分I:∑e(i) 誤差的累加
微分D:e(k) - e(k-1) 此次誤差-上次誤差
因為有誤差積分 ∑e(i),一直累加,也就是當前的輸出u(k)與過去的所有狀態都有關系。
位置式PID算法的偽代碼如下:
//位置式PID(偽代碼)
previous_err = 0;
integral = 0;
loop: //根據目標值與測量值(如電機的設定速度與讀到的編碼器轉后后的速度),循環計算更新輸出值(如PWM)
error = setpoint - measured_value; /*誤差項:目標值-測量值*/
integral += error * dt; /*積分項:誤差項的累計*/
derivative = (error - previous_error) / dt; /*微分項:誤差的變化率*/
output = Kp*error + Ki*integral + Kd*derivative; /*三項分別乘以PID系數即為輸出*/
previous_err = err; //更新誤差
wait(dt); //等待固定的計算周期
goto loop;
增量式PID
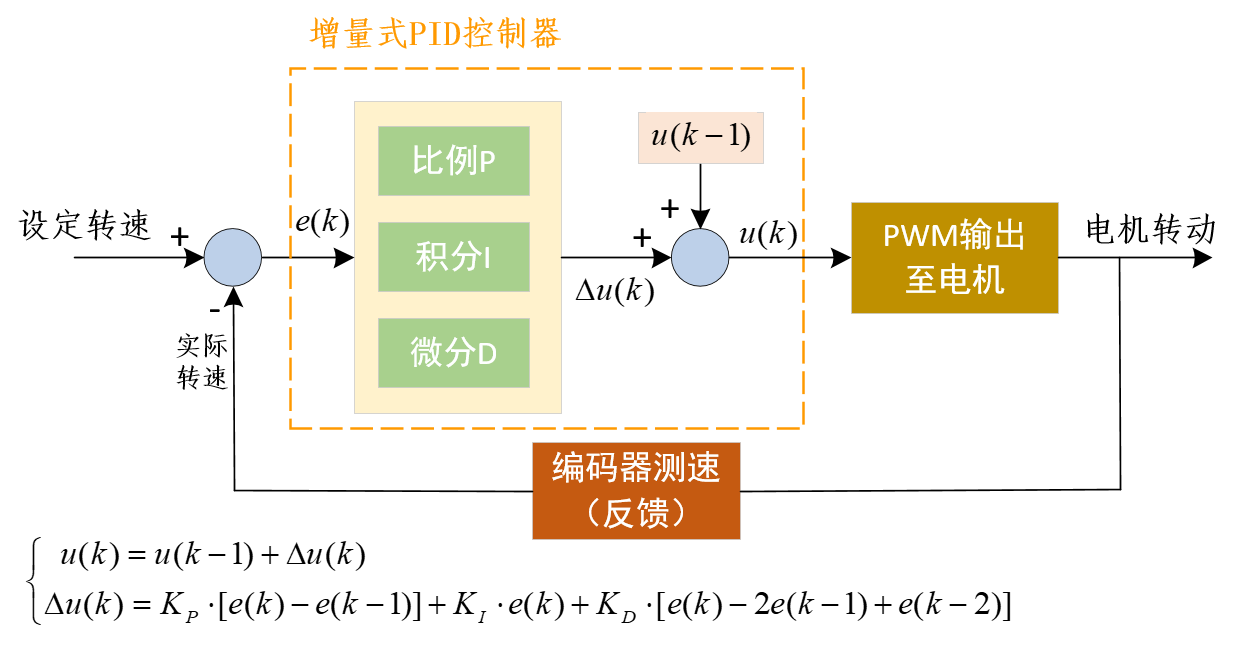
比例P:e(k) - e(k-1) 此次誤差-上次誤差
積分I:e(k) 此次誤差d
微分D:e(k) - 2e(k-1)+e(k-2) 這次誤差-2×上次誤差+上上次誤差
注意增量式PID首先計算的是Δu(k),然后與上次的輸出相加,才是此次的輸出結果。增量式PID沒有誤差累加,控制增量Δu(k)的確定僅與最近3次的采樣值有關。
增量式PID算法的偽代碼如下:
//增量式PID(偽代碼)
previous02_error = 0; //上上次偏差
previous01_error = 0; //上次偏差
integral = 0; //積分和
pid_out = 0; //pid增量累加和
loop:
error = setpoint ? measured_value; /*誤差項:目標值-測量值*/
proportion = error - previous01_error; /*比例項:誤差項-上次偏差*/
integral = error * dt; /*積分項:誤差項的累計*/
derivative = (error ? 2*previous01_error + previous02_error) / dt;/*微分項:上次誤差與上上次誤差的變化率*/
/*或寫成:derivative = ( (error ? previous01_error)/dt - (previous01_error - previous02_error)/dt )*/
pid_delta = Kp × error + Ki × integral + Kd × derivative; //計算得到PID增量
pid_out = pid_out + pid_delta; //計算最終的PID輸出
previous02_error = previous01_error; //更新上上次偏差
previous01_error = error; //更新上次偏差
wait(dt); //等待固定的計算周期
goto loop;
PID各項的作用
以這個彈簧為例(假設沒有重力,只有空氣阻力),先是在平衡位置上(目標位置),拉它一下,然后松手,這時它會震蕩起來。
P 比例
P就是比例的意思。這里就類比彈簧的彈力(回復力):F=k*Δx
當物塊距離平衡位置越遠時,彈力越大,反之,離平衡位置越近,力越小。
當物塊位于平衡位置上方時,彈性向下,當物塊位于平衡位置下方時,彈性向上,即彈力總是使物塊朝平衡位置施力。
D 微分/求導/變化率
只有P控制,物塊一直在上下震蕩,整個系統不是特別穩定。
這是因為空氣阻力太小,想象一下整個把它放到水里,物塊應該很快會靜止下來。這時因為阻力的作用。
D的作用就相當于阻力:
它與變化速度(單位時間內的變化量)有關,變化的越大,它施加的阻力也就越大
它的方向與目標值無關,比如,當物塊從下到上經過平衡位置時,它的方向一直是朝下,
即先是阻止物塊靠近平衡位置,再是阻止物塊遠離平衡位置(對比P的作用,始終阻止物塊遠離平衡位置)
它的作用就是減小系統的超調量了(減少系統在平衡位置震蕩)
I 積分/誤差累積
有了P的動力和D的阻力,這個物塊就可以較快的穩定下來了,那I的作用是什么呢?
想象一下,如果有其它外力的影響,在某一時刻,物塊將要到達平衡位置時,恰好P的動力與外力(與P的作用方向相反的恒定力)抵消,則之后物塊將停在此處附近(因為此時D的力也趨近0,并很快變為0),一直到達不了平衡位置。
這時,I的誤差積分作用就很有必要了:
它計算的誤差的累計,只要有誤差,它就一直增加,開始可能很小,但只要沒要到達平衡位置,該值就會越來越大
它的作用就是消除系統的靜態誤差了
PID參數整定
實際應用,進行PID參數調節時,一般使用試湊法,PID參數整定口訣如下:
參數整定找最佳,從小到大順序查,
先是比例后積分,最后再把微分加,
曲線振蕩很頻繁,比例度盤要放大,
曲線漂浮繞大灣,比例度盤往小扳,
曲線偏離回復慢,積分時間往下降,
曲線波動周期長,積分時間再加長,
曲線振蕩頻率快,先把微分降下來,
動差大來波動慢,微分時間應加長,
理想曲線兩個波,前高后低4比1,
一看二調多分析,調節質量不會低。
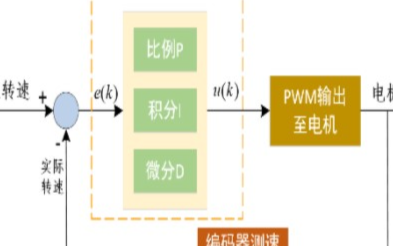
電機PID速度控制
上面介紹了PID的基礎知識,接下來就使用位置式PID來實現對直流電機轉速的控制。
程序
自定義PID結構體
typedef struct
{
float target_val; //目標值
float err; //偏差值
float err_last; //上一個偏差值
float Kp,Ki,Kd; //比例、積分、微分系數
float integral; //積分值
float output_val; //輸出值
}PID;
PID算法實現(位置式PID)
float PID_realize(float actual_val)
{
/*計算目標值與實際值的誤差*/
pid.err = pid.target_val - actual_val;
/*積分項*/
pid.integral += pid.err;
/*PID算法實現*/
pid.output_val = pid.Kp * pid.err +
pid.Ki * pid.integral +
pid.Kd * (pid.err - pid.err_last);
/*誤差傳遞*/
pid.err_last = pid.err;
/*返回當前實際值*/
return pid.output_val;
}
周期調用PID計算
//周期定時器的回調函數
void AutoReloadCallback()
{
int sum = 0;/*編碼器值(PID輸入)*/
int res_pwm = 0;/*PWM值(PID輸出)*/
/*讀取編碼器測量的速度值*/
sum = read_encoder();
/*進行PID運算,得到PWM輸出值*/
res_pwm = PID_realize(sum);
/*根據PWM值控制電機轉動*/
set_motor_rotate(res_pwm);
/*給上位機通道1發送實際值*/
set_computer_value(SEND_FACT_CMD, CURVES_CH1, &sum, 1);
}
上位機
這里使用野火多功能調試助手的"PID調試助手“來進行實驗,用于顯示PID調節時的電機轉速曲線。

實驗演示
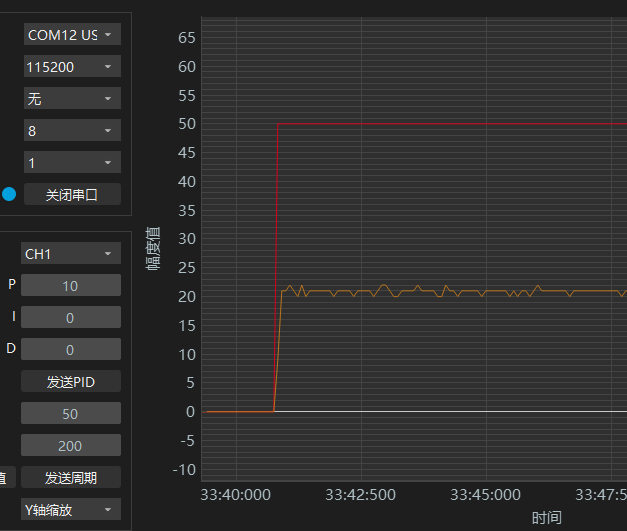
目標速度值設為50(這里的目標值50使用的是編碼器10ms捕獲的脈沖數),通過體調節PID的參數,來測試電機能否較快的達到目標速度。
先調節P
P值先使用10看看效果,從速度曲線可以看出,達不到目標速度,且與目標速度相差較大。
| P | I | D |
|---|---|---|
| 10 | 0 | 0 |
P值加大到100,從速度曲線可以看出,還是達不到目標速度。
| P | I | D |
|---|---|---|
| 100 | 0 | 0 |
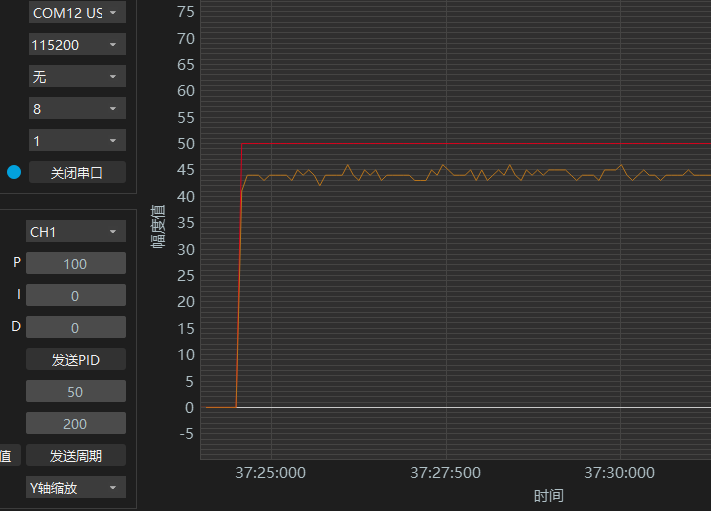
只使用P,會存在靜差,始終達到不了目標值,這時就要使用積分項來消除靜差了。
再調節I
P保持100,I使用0.2,從速度曲線可以看出,可以達到目標速度,但跟隨的速度較慢。
| P | I | D |
|---|---|---|
| 100 | 0.2 | 0 |
P保持100,加大I,使用1.0,從速度曲線可以看出,可以達到目標速度,跟隨的速度加快了。
| P | I | D |
|---|---|---|
| 100 | 1.0 | 0 |

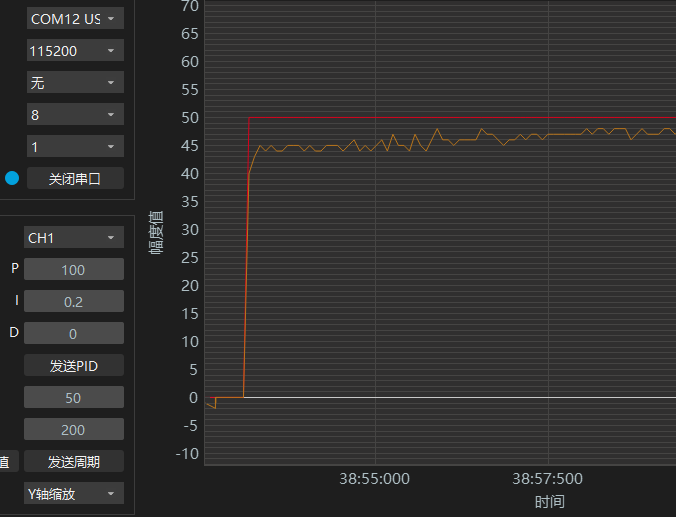
P保持100,繼續加大I,使用3.0,從速度曲線可以看出,可以達到目標速度,跟隨的速度進一步加快了。
| P | I | D |
|---|---|---|
| 100 | 3.0 | 0 |
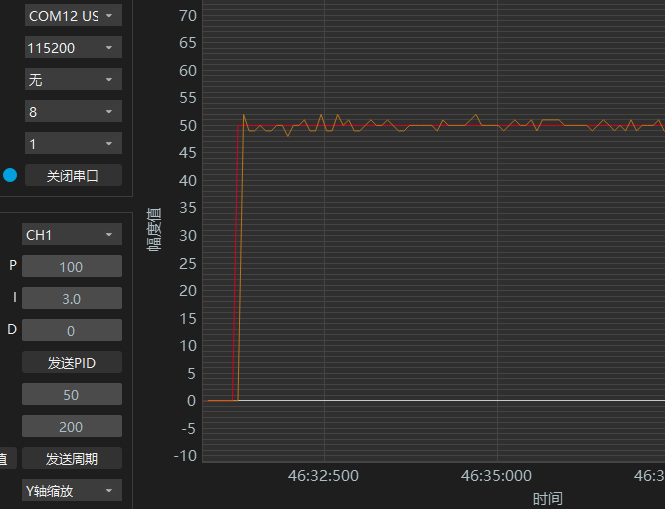
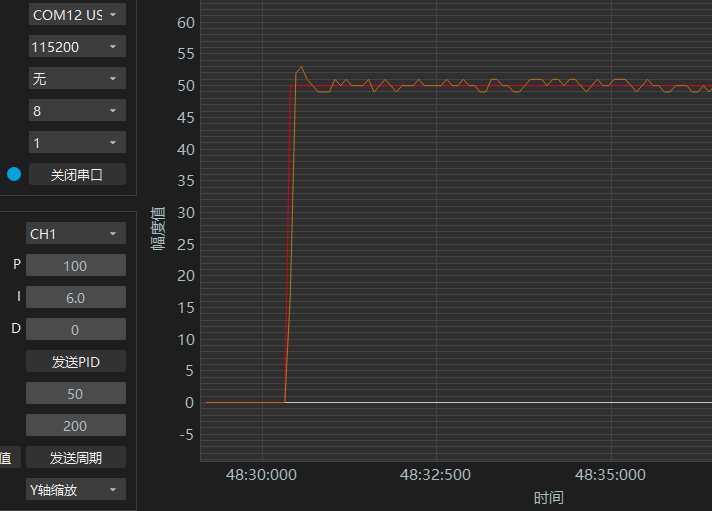
P保持100,再繼續加大I,使用6.0,從速度曲線可以看出,可以達到目標速度,跟隨速度也很快,但有一點過沖。
| P | I | D |
|---|---|---|
| 100 | 6.0 | 0 |
對于過沖,可以再加入微分試試,微分D相當于阻力的效果
最后調節D
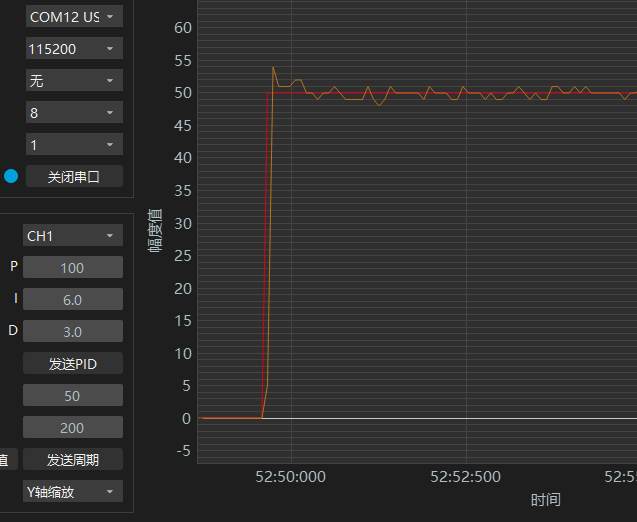
P保持100,I保持6.0,D使用3.0,從速度曲線上,好像看不出明顯的變化。
| P | I | D |
|---|---|---|
| 100 | 6.0 | 3.0 |
P保持100,I保持6.0,D加大到6.0,從速度曲線上看,過沖幅度減小了點。
| P | I | D |
|---|---|---|
| 100 | 3.0 | 6.0 |

演示視頻
https://www.bilibili.com/video/BV18Q4y1R7e8?spm_id_from=333.999.0.0

總結
本篇簡單介紹了PID的基礎原理與參數整定,若想把PID參數調節好,還需要不斷的實踐與調試。
-
單片機
+關注
關注
6037文章
44558瀏覽量
635238 -
電機控制
+關注
關注
3534文章
1879瀏覽量
268800 -
PWM
+關注
關注
114文章
5186瀏覽量
213920 -
PID
+關注
關注
35文章
1472瀏覽量
85515 -
PID控制
+關注
關注
10文章
460瀏覽量
40095
發布評論請先 登錄
相關推薦

【創作者之星.No3】電機控制原理與電路設計知識匯總
PID調節控制做電機速度控制
電機控制進階——PID速度控制

STM32實現四驅小車電機控制任務之電機速度PID控制算法





 工商網監
工商網監
評論