") 深入介紹三種不同的程序架構(gòu)
深入介紹三種不同的程序架構(gòu)
0、前言
在嵌入式軟件開發(fā),包括單片機(jī)開發(fā)中,軟件架構(gòu)對(duì)于開發(fā)人員是一個(gè)必須認(rèn)真考慮的問題。軟件架構(gòu)對(duì)于系統(tǒng)整體的穩(wěn)定性和可靠性是非常重要的,一個(gè)合適的軟件架構(gòu)不僅結(jié)構(gòu)清晰,并且便于開發(fā)。
我相信在嵌入式或單片機(jī)軟件開發(fā)的初期大多數(shù)開發(fā)者采用的都是簡單的前后臺(tái)順序執(zhí)行架構(gòu)(我就是這樣的)。
在嵌入式軟件開發(fā)中,程序架構(gòu)主要分為三種,本篇文章將對(duì)這三種程序架構(gòu)做出詳解。
1、軟件架構(gòu)存在的意義
可以說一個(gè)好的程序架構(gòu),是一個(gè)有經(jīng)驗(yàn)的工程師和一個(gè)初學(xué)者的分水嶺。 軟件架構(gòu)對(duì)于開發(fā)人員是友好的,你希望先執(zhí)行什么任務(wù)后執(zhí)行什么任務(wù),或者這一個(gè)時(shí)間點(diǎn)執(zhí)行什么任務(wù)下一個(gè)執(zhí)行什么任務(wù),又或者什么事件會(huì)同步到某個(gè)任務(wù)等等,在不同的軟件架構(gòu)下,解決上述問題的具體方法都是有所區(qū)別的。 軟件架構(gòu)對(duì)開發(fā)者最大的幫助是: 幫助開發(fā)者掌控整個(gè)工程的框架,當(dāng)你熟練使用其中某一個(gè)程序架構(gòu)后,對(duì)于系統(tǒng)中出現(xiàn)的bug你一定能夠快速的定位并解決。 當(dāng)然,我建議要根據(jù)需要選擇合適的軟件架構(gòu)進(jìn)行開發(fā),具體原因在文章后面會(huì)進(jìn)行介紹。
2、深入介紹三種不同的程序架構(gòu)
三種常用的軟件架構(gòu)有:順序執(zhí)行的前后臺(tái)系統(tǒng)、時(shí)間片輪詢系統(tǒng)和多任務(wù)操作系統(tǒng)。 為了讓大家有一個(gè)更為清晰的認(rèn)識(shí),我分別用三種軟件架構(gòu)對(duì)一個(gè)實(shí)例進(jìn)行介紹說明。這個(gè)實(shí)例如下: 它有4個(gè)任務(wù),這4個(gè)任務(wù)為按鍵掃描、聲光報(bào)警、顯示屏刷新和超聲波測距。這個(gè)實(shí)例的具體功能是通過按鍵設(shè)置測量距離的閾值,當(dāng)測距距離低于設(shè)置的閾值時(shí),觸發(fā)聲光報(bào)警并且將測量距離實(shí)時(shí)顯示在顯示屏上(這個(gè)應(yīng)用是汽車倒車?yán)走_(dá)的具體體現(xiàn))。
順序執(zhí)行的前后臺(tái)系統(tǒng)
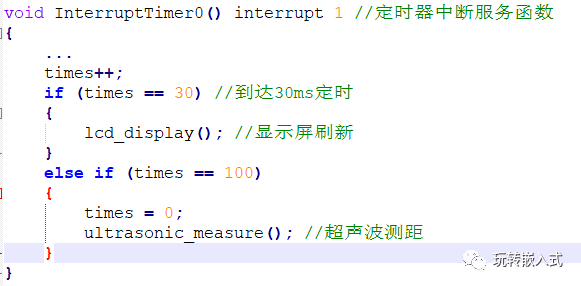
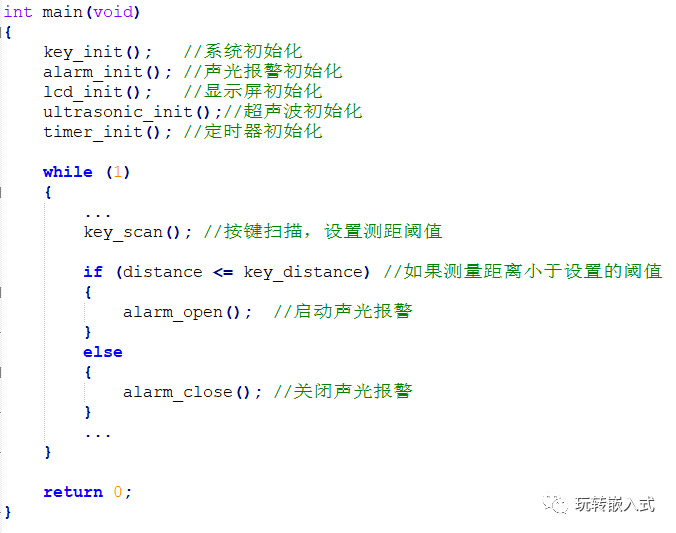
在順序執(zhí)行的前后臺(tái)系統(tǒng)中,我會(huì)把鍵盤掃描用查詢的方式放在while(1)中,而顯示屏刷新和超聲波測距使用中斷,在中斷服務(wù)函數(shù)中獲取測量距離后進(jìn)行顯示,在主函數(shù)的循環(huán)中進(jìn)行按鍵的檢測,聲光處理也放在主循環(huán)中。這樣整個(gè)程序就以變量標(biāo)志的同步方式在主循環(huán)和后臺(tái)中斷中執(zhí)行,對(duì)應(yīng)的程序代碼如圖所示:
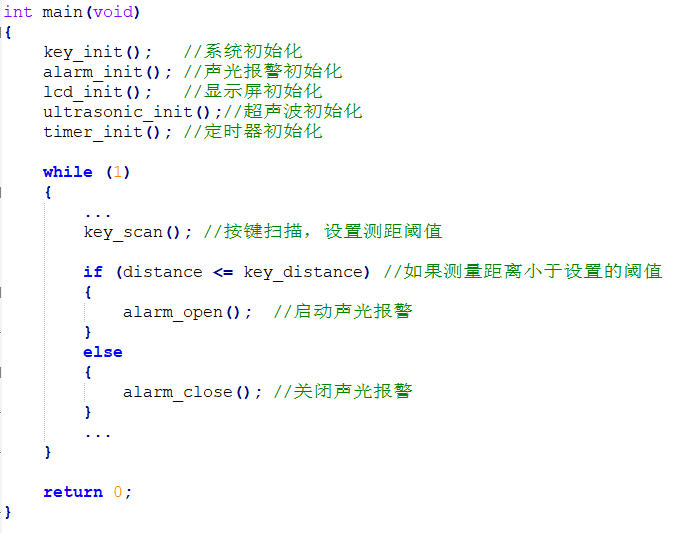
順序執(zhí)行前后臺(tái)系統(tǒng)的主函數(shù)
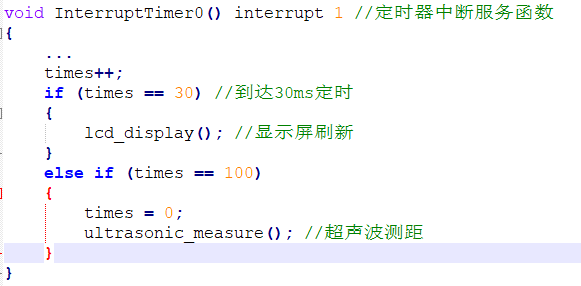
順序執(zhí)行前后臺(tái)系統(tǒng)的中斷服務(wù)函數(shù) 這種架構(gòu)的優(yōu)點(diǎn)是使用簡單易于理解,而缺點(diǎn)是每個(gè)任務(wù)所占的CPU時(shí)間過長的話,會(huì)導(dǎo)致程序的實(shí)時(shí)性能差,就比如按鍵的檢測等。
時(shí)間片輪詢系統(tǒng)和多任務(wù)操作系統(tǒng)
時(shí)間片輪詢法實(shí)際上通常出現(xiàn)在操作系統(tǒng)中,也就是說他屬于操作系統(tǒng),但在這里所說的是基于前后臺(tái)系統(tǒng)的時(shí)間片輪詢。時(shí)間片輪詢法的實(shí)質(zhì)其實(shí)就是選出一個(gè)定時(shí)器,沒進(jìn)一次定時(shí)中斷對(duì)計(jì)數(shù)值進(jìn)行自加,在主循環(huán)中根據(jù)這個(gè)計(jì)數(shù)值執(zhí)行任務(wù),這個(gè)計(jì)數(shù)值也就是任務(wù)輪詢的時(shí)間片。 在這個(gè)實(shí)例中,如果采用時(shí)間片輪詢系統(tǒng)的話,首先選用主控芯片的任一定時(shí)器,定時(shí)器定時(shí)時(shí)間周期由我們決定,為了保證實(shí)時(shí)性和運(yùn)行效率,這個(gè)值通常取10ms、30ms、50ms等,我會(huì)將按鍵掃描輪值值設(shè)置為20ms,因?yàn)榘存I抖動(dòng)的時(shí)長一般為20ms,這樣處理既達(dá)到了消抖的目的,又不會(huì)漏掉按鍵的檢測;而顯示屏的刷新設(shè)置為30ms,如果你覺得刷新反應(yīng)慢了也可以修改這一輪詢值得到改善; 而超聲波測距的輪詢值設(shè)置為100ms,即每隔100模式觸發(fā)測距一次,這個(gè)測距頻率已經(jīng)能夠滿足大多數(shù)的情況了。 程序代碼如下:
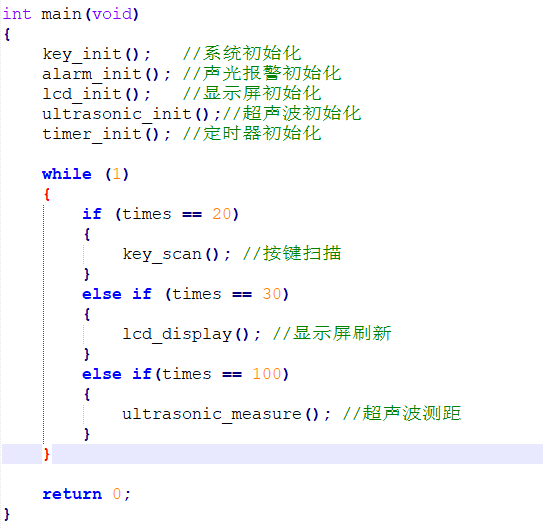
時(shí)間片輪詢系統(tǒng)的主函數(shù)
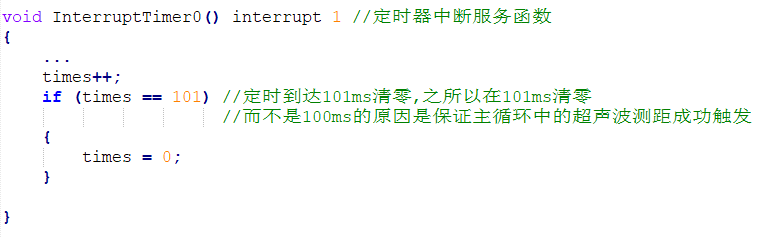
時(shí)間片輪詢系統(tǒng)的定時(shí)器中斷函數(shù)
可以看出時(shí)間片輪詢法相比順序執(zhí)行還是有很大優(yōu)勢的,既有順序執(zhí)行法的優(yōu)點(diǎn),也有操作系統(tǒng)的部分優(yōu)點(diǎn)。
多任務(wù)操作系統(tǒng)
操作系統(tǒng)的本身是一個(gè)比較復(fù)雜的東西,任務(wù)的管理和調(diào)度實(shí)現(xiàn)的底層是很復(fù)雜和困難的。但是呢,我們一般都是把操作系統(tǒng)本身作為一個(gè)工具一個(gè)平臺(tái),我們的目的是使用它的功能而不是開發(fā)一個(gè)操作系統(tǒng)。
我使用過ucos和freertos小型的實(shí)時(shí)操作系統(tǒng),也使用過Linux大型的操作系統(tǒng),有了操作系統(tǒng),不管是對(duì)于程序的穩(wěn)定性和開發(fā)的效率都會(huì)好很多。我們在使用操作系統(tǒng)的時(shí)候更多的需要去學(xué)習(xí)和理解它的一些調(diào)度和通信的方式。
實(shí)際上真正能使用操作系統(tǒng)的人并不多,反而是跑裸機(jī)的占大多數(shù),這也和產(chǎn)品的具體要求有關(guān),很多簡單的系統(tǒng)只需要裸機(jī)即可滿足。
在這里本我不過多的介紹操作系統(tǒng)本身,因?yàn)椴僮飨到y(tǒng)確實(shí)挺復(fù)雜的,下面圖例中的代碼是在freertos中創(chuàng)建按鍵控制LED亮滅的程序結(jié)構(gòu),大家可以對(duì)比一下:
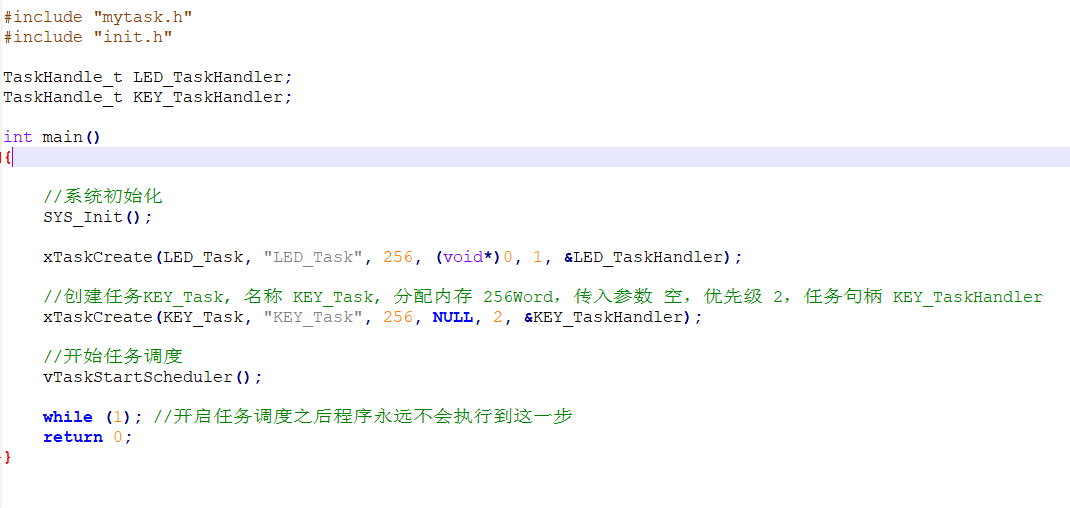
freertos多任務(wù)系統(tǒng)中主函數(shù)
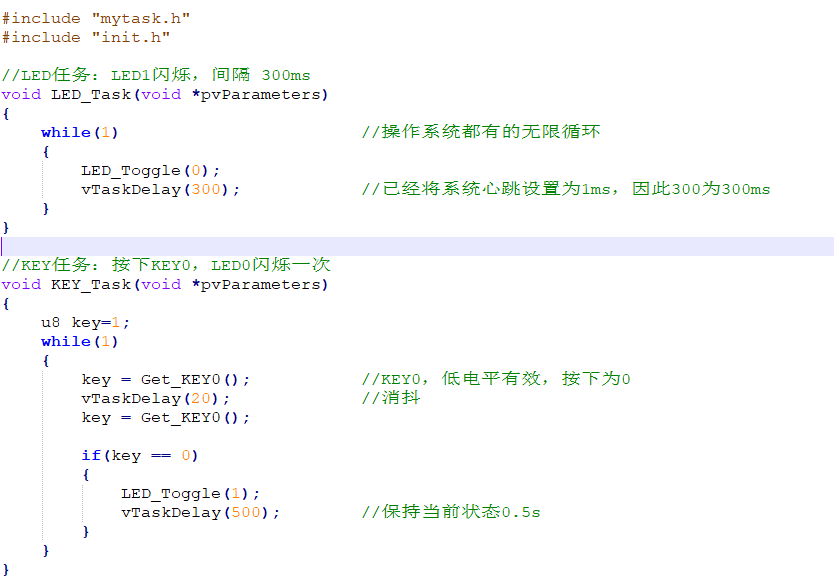
freertos多任務(wù)操作系統(tǒng)中的任務(wù)回調(diào)函數(shù)
3、如何選擇合適的軟件架構(gòu)
我使用過多種不同MCU做項(xiàng)目開發(fā),例如:STM32、STC15、新唐等,也接觸過復(fù)雜的設(shè)計(jì)需求,例如:車載智能系統(tǒng)和智能家居,跑過操作系統(tǒng)ucos、freertos和Linux等等,在回到裸機(jī)開發(fā)時(shí),就會(huì)不然而然的去思考完整系統(tǒng)的軟件架構(gòu)的設(shè)計(jì)問題,相信在讀者中開發(fā)裸機(jī)的也占大多數(shù)。 我認(rèn)為沒有最好的軟件架構(gòu)(程序架構(gòu)),而是只有最合適的。因?yàn)樵诓煌膽?yīng)用場景中適合采用不同的程序設(shè)計(jì),而單純的去比較哪種程序架構(gòu)是最好的沒有什么實(shí)際的意義。 那接下來我們來對(duì)具體的應(yīng)用場景進(jìn)行分析,在一些邏輯清晰功能單一的系統(tǒng)中就很適合選擇順序執(zhí)行的前后臺(tái)架構(gòu),這個(gè)軟件架構(gòu)往往能夠滿足我們大部分的需求,比如電飯煲、電磁爐和聲控?zé)襞莸龋?而在一些資源缺乏的單片機(jī)并且對(duì)系統(tǒng)可靠性要求較高的情況下非常適合,因?yàn)檫@種方法的系統(tǒng)耗費(fèi)比較小,只是犧牲了一個(gè)定時(shí)器而已,但是選擇此種程序架構(gòu)需要我們對(duì)時(shí)間片進(jìn)行深思熟慮的劃分; 最后,在一些功能復(fù)雜,邏輯控制較為困難的系統(tǒng)中就適合選擇多任務(wù)操作系統(tǒng),比如視頻監(jiān)控系統(tǒng)、無人機(jī)等等應(yīng)用場景。 作為一名嵌入式軟件工程師,掌握這三種軟件架構(gòu)是非常有必要的,它們可以讓我們在設(shè)計(jì)程序時(shí)擁有更多的選擇和思考,而每一種不同的程序架構(gòu)都具備它自己的優(yōu)勢與不足,這需要我們?nèi)ビ眯膶?shí)踐方可體會(huì)到它的奧妙。
原文標(biāo)題:詳解嵌入式開發(fā)中的3種程序架構(gòu)
文章出處:【微信公眾號(hào):嵌入式ARM】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
審核編輯:湯梓紅
-
單片機(jī)
+關(guān)注
關(guān)注
6037文章
44558瀏覽量
635353 -
嵌入式
+關(guān)注
關(guān)注
5082文章
19126瀏覽量
305242 -
程序
+關(guān)注
關(guān)注
117文章
3787瀏覽量
81049
原文標(biāo)題:詳解嵌入式開發(fā)中的3種程序架構(gòu)
文章出處:【微信號(hào):gh_c472c2199c88,微信公眾號(hào):嵌入式微處理器】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
單片機(jī)開發(fā)中常用的三種軟件架構(gòu)
三種主流芯片架構(gòu)
STM32的三種boot模式介紹
單片機(jī)三種常用的軟件架構(gòu)
程序的三種基本結(jié)構(gòu)
機(jī)載視頻圖形顯示系統(tǒng)的三種架構(gòu)及基于FPGA的設(shè)計(jì)介紹
單片機(jī)的應(yīng)用程序架構(gòu)有哪些?三種架構(gòu)的詳細(xì)資料和代碼說明
嵌入式軟件開發(fā)中三種程序架構(gòu)
嵌入式開發(fā)中要用的三種程序架構(gòu)~
淺析單片機(jī)三種應(yīng)用程序的架構(gòu)
嵌入式軟件開發(fā)三種程序架構(gòu)詳解

三種常見嵌入式開發(fā)程序架構(gòu)

實(shí)用:牛人總結(jié)的單片機(jī)三種應(yīng)用程序架構(gòu)!
深入介紹嵌入式開發(fā)中三種不同的程序架構(gòu)
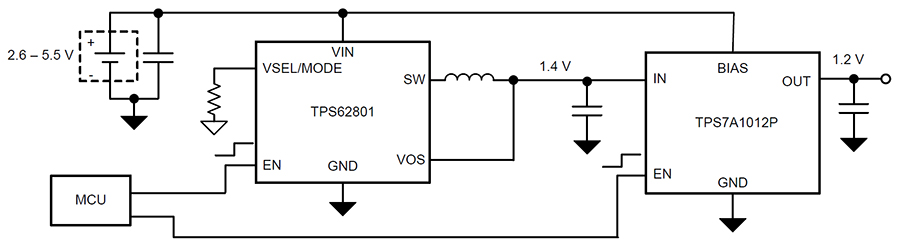
比較三種基本電源架構(gòu)的權(quán)衡





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論