 位置式PID算法和增量式PID算法的差異
位置式PID算法和增量式PID算法的差異
1 前言
控制系統通常根據有沒有反饋會分為開環系統和閉環系統,在閉環系統的控制中,PID算法非常強大,其三個部分分別為;
-
P:比例環節; -
I:積分環節; -
D:微分環節;
PID算法可以自動對控制系統進行準確且迅速的校正,因此被廣泛地應用于工業控制系統。
2 開環控制
首先來看開環控制系統,如下圖所示,隆哥蒙著眼,需要走到虛線旗幟所表示的目標位置,由于缺少反饋(眼睛可以感知當前距離和位置,由于眼睛被蒙上沒有反饋,所以這也是一個開環系統),最終隆哥會較大概率偏離預期的目標,可能會運行到途中實線旗幟所表示的位置。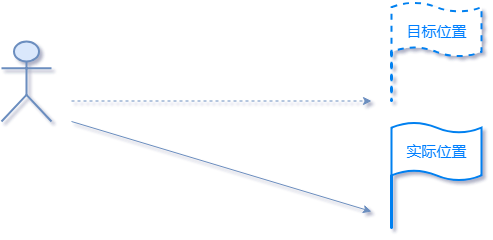
開環系統的整體結構如下所示;

-
Input:告訴隆哥目標距離的直線位置(10米); -
Controller:隆哥大腦中計算出到達目標所需要走多少步; -
Process:雙腿作為執行機構,輸出了相應的步數,但是最終仍然偏離了目標;
3 閉環控制
所以為了準確到達目標位置,這里就需要引入反饋,具體如下圖所示;

-
第一步
Input:告訴隆哥目標距離的直線位置(10米); -
第二步
Controller:隆哥大腦中計算出到達目標所需要走多少步; -
第三步
Process:雙腿作為執行機構,輸出了相應的步數,但是最終仍然偏離了目標; -
第四步
Feedback:通過視覺獲取到目前已經前進的距離,(比如前進了2米,那么還有8米的偏差); -
第五步
err:根據偏差重新計算所需要的步數,然后重復上述四個步驟,最終隆哥達到最終的目標位置。
4 PID
4.1 系統架構
雖然在反饋系統下,隆哥最終到達目標位置,但是現在又來了新的任務,就是又快又準地到達目標位置。所以這里隆哥開始采用PID Controller,只要適當調整P,I和D的參數,就可以到達目標位置,具體如下圖所示;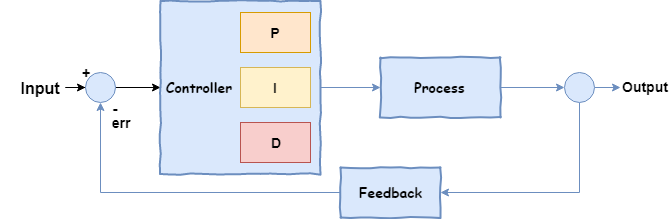
隆哥為了最短時間內到達目標位置,進行了不斷的嘗試,分別出現了以下幾種情況;
- 跑得太快,最終導致沖過了目標位置還得往回跑;
- 跑得太慢,最終導致到達目標位置所用時間太長;
- 第一步:得到與目標位置的距離偏差(比如最開始是10米,后面會逐漸變小);
- 第二步:根據誤差,預估需要多少速度,如何估算呢,看下面幾步;
P比例則是給定一個速度的大致范圍,滿足下面這個公式;
err)與比例系數的乘積,具體如下所示;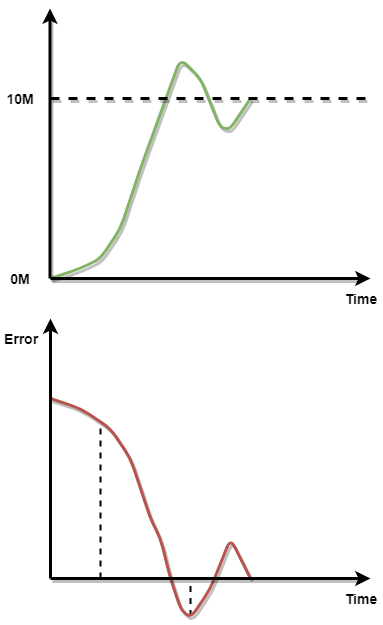
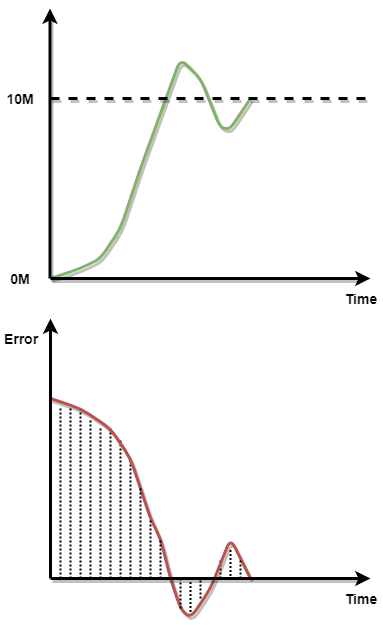
比例作用
綠色線為上述例子中從初始位置到目標位置的距離變化;紅色線為上述例子中從初始位置到目標位置的偏差變化,兩者為互補的關系;
I積分則是誤差在一定時間內的和,滿足以下公式;
如下圖所示;
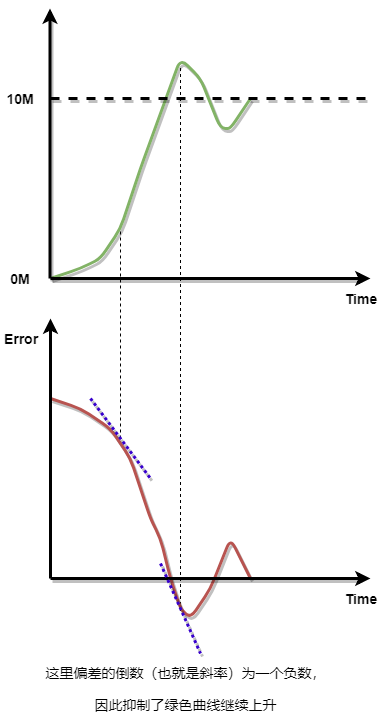
D微分則是誤差變化曲線某處的導數,或者說是某一點的斜率,因此這里需要引入微分;
綜上,,分別增加其中一項參數會對系統造成的影響總結如下表所示; 參數 上升時間 超調量 響應時間 穩態誤差 穩定性
| Kp | 減少 | 增加 | 小變化 | 減少 | 降級 |
| Ki | 減少 | 增加 | 增加 | 消除 | 降級 |
| Kd | 微小的變化 | 減少 | 減少 | 理論上沒有影響 | 小,穩定性會提升 |
4.2 理論基礎
上面扯了這么多,無非是為了初步理解PID在負反饋系統中的調節作用,下面開始推導一下算法實現的具體過程;PID控制器的系統框圖如下所示;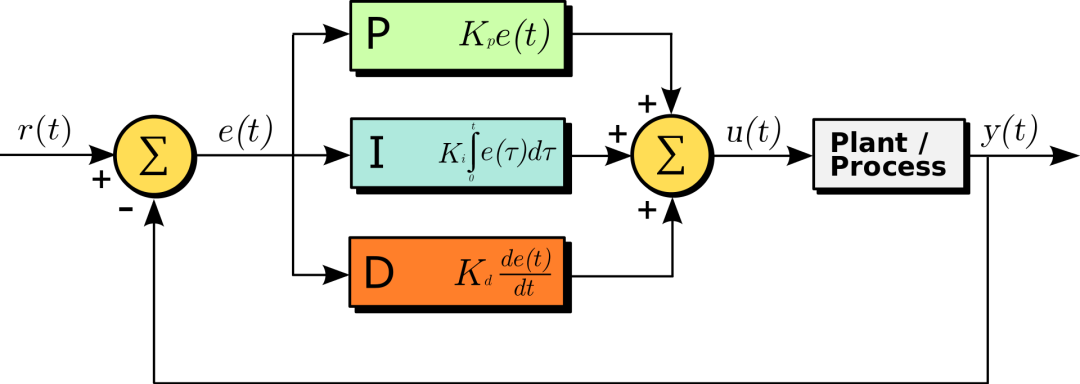
圖片來自Wiki
因此不難得出輸入和輸出的關系;

是比例增益;是積分增益;是微分增益;
4.3 離散化
在數字系統中進行PID算法控制,需要對上述算法進行離散化;假設系統采樣時間為則將輸入序列化得到;
將輸出序列化得到;

- 比例項:離散化
- 積分項:
- 微分項:

將式①再做一下簡化;
最終得到增量式PID的離散公式如下:

4.4 偽算法
這里簡單總結一下增量式PID實現的偽算法;previous_error:=0//上一次偏差 integral:=0//積分和 //循環 //采樣周期為dt loop: //setpoint設定值 //measured_value反饋值 error:=setpoint?measured_value//計算得到偏差 integral:=integral+error×dt//計算得到積分累加和 derivative:=(error?previous_error)/dt//計算得到微分 output:=Kp×error+Ki×integral+Kd×derivative//計算得到PID輸出 previous_error:=error//保存當前偏差為下一次采樣時所需要的歷史偏差 wait(dt)//等待下一次采用 gotoloop
5 C++實現
這里是增量式PID算法的C語言實現;pid.cpp
#ifndef_PID_SOURCE_ #define_PID_SOURCE_ #include #include #include"pid.h" usingnamespacestd; classPIDImpl { public: PIDImpl(doubledt,doublemax,doublemin,doubleKp,doubleKd,doubleKi); ~PIDImpl(); doublecalculate(doublesetpoint,doublepv); private: double_dt; double_max; double_min; double_Kp; double_Kd; double_Ki; double_pre_error; double_integral; }; PID::PID(doubledt,doublemax,doublemin,doubleKp,doubleKd,doubleKi) { pimpl=newPIDImpl(dt,max,min,Kp,Kd,Ki); } doublePID::calculate(doublesetpoint,doublepv) { returnpimpl->calculate(setpoint,pv); } PID::~PID() { deletepimpl; } /** *Implementation */ PIDImpl::PIDImpl(doubledt,doublemax,doublemin,doubleKp,doubleKd,doubleKi): _dt(dt), _max(max), _min(min), _Kp(Kp), _Kd(Kd), _Ki(Ki), _pre_error(0), _integral(0) { } doublePIDImpl::calculate(doublesetpoint,doublepv) { //Calculateerror doubleerror=setpoint-pv; //Proportionalterm doublePout=_Kp*error; //Integralterm _integral+=error*_dt; doubleIout=_Ki*_integral; //Derivativeterm doublederivative=(error-_pre_error)/_dt; doubleDout=_Kd*derivative; //Calculatetotaloutput doubleoutput=Pout+Iout+Dout; //Restricttomax/min if(output>_max) output=_max; elseif(output//Saveerrortopreviouserror _pre_error=error; returnoutput; } PIDImpl::~PIDImpl() { } #endif
pid.h
#ifndef_PID_H_ #define_PID_H_ classPIDImpl; classPID { public: //Kp-proportionalgain //Ki-Integralgain //Kd-derivativegain //dt-loopintervaltime //max-maximumvalueofmanipulatedvariable //min-minimumvalueofmanipulatedvariable PID(doubledt,doublemax,doublemin,doubleKp,doubleKd,doubleKi); //Returnsthemanipulatedvariablegivenasetpointandcurrentprocessvalue doublecalculate(doublesetpoint,doublepv); ~PID(); private: PIDImpl*pimpl; }; #endif
pid_example.cpp
#include"pid.h" #include intmain(){ PIDpid=PID(0.1,100,-100,0.1,0.01,0.5); doubleval=20; for(inti=0;i100;i++){ doubleinc=pid.calculate(0,val); printf("val:%7.3finc:%7.3f ",val,inc); val+=inc; } return0; } 編譯并測試;
g++-cpid.cpp-opid.o #Tocompileexamplecode: g++pid_example.cpppid.o-opid_example
6 總結
以上內容總結了PID控制器算法在閉環系統中根據偏差變化的具體調節作用,每個環節可能對系統輸出造成什么樣的變化,給出了位置式和增量式離散PID算法的推導過程,并給出了位置式算法的C++程序實現。
1 什么是增量式PID?
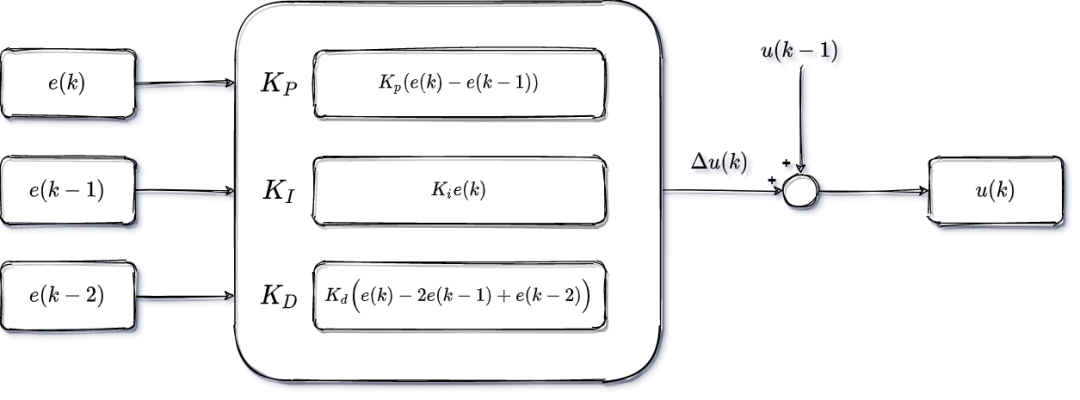
先看一下增量式PID的離散公式如下:
:比例系數 :積分系數 :微分系數 :偏差
對于所謂的位置式,增量式的算法,這兩者只是在算法的實現上的存在差異,本質的控制上對于系統控制的影響還是相同,單純從輸入和輸出的角度來比較,具體如下表所示;

這里簡單的說明一下;
- 位置式:位置式算法較為簡單,直接輸入當前的偏差 ,即可得到輸出;
- 增量式:增量式算法需要保存歷史偏差,,即在第次控制周期時,需要使用第和第次控制所輸入的偏差,最終計算得到 ,此時,這還不是我們所需要的PID輸出量;所以需要進行累加;
不難發現第一次控制周期時,即時;
由以上公式我們可以推導出下式;
所以可以看出,最終PID的輸出量,滿足以下公式;
可見增量式算法,就是所計算出的PID增量的歷史累加和;
2 舉個例子
2.1 位置式PID
下面從一個簡單的例子中去理解一下增量式PID,這里依然舉一個不是很恰當的例子;如果是位置式PID算法的話:
- 隆哥對一個直流電機進行調速,設定了轉速為 1000;
- 這時由于反饋回來的速度和設定的速度偏差為 ;
- 經過位置式PID計算得到;
- 作為Process的輸入值(可以是PWM的占空比),最終Process輸出相應的PWM驅動直流電機;
- 反饋裝置檢測到電機轉速,然后重復以上步驟;
整體框圖如下所示;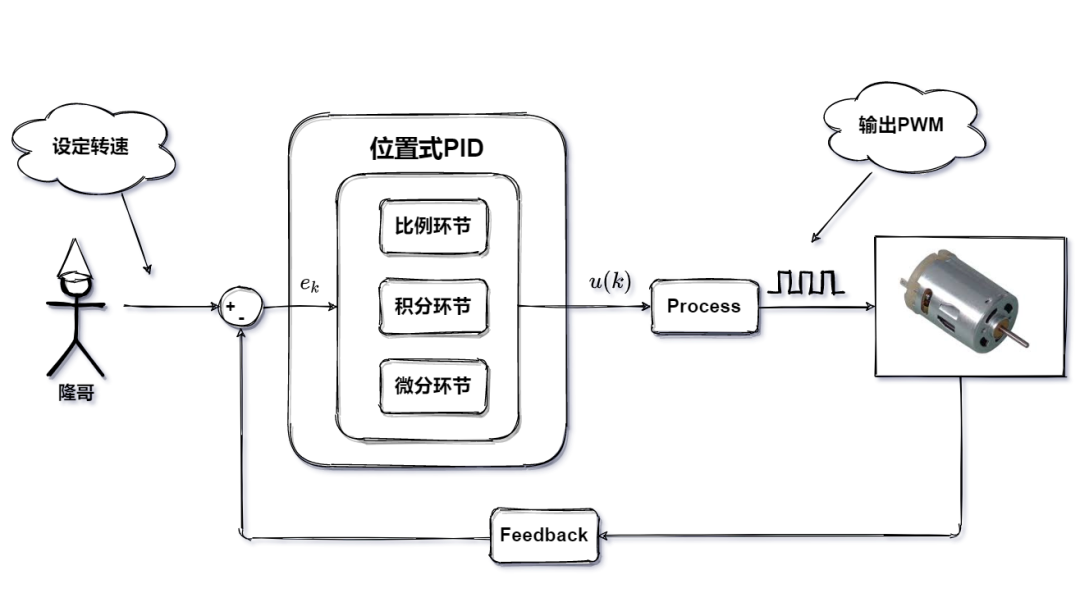
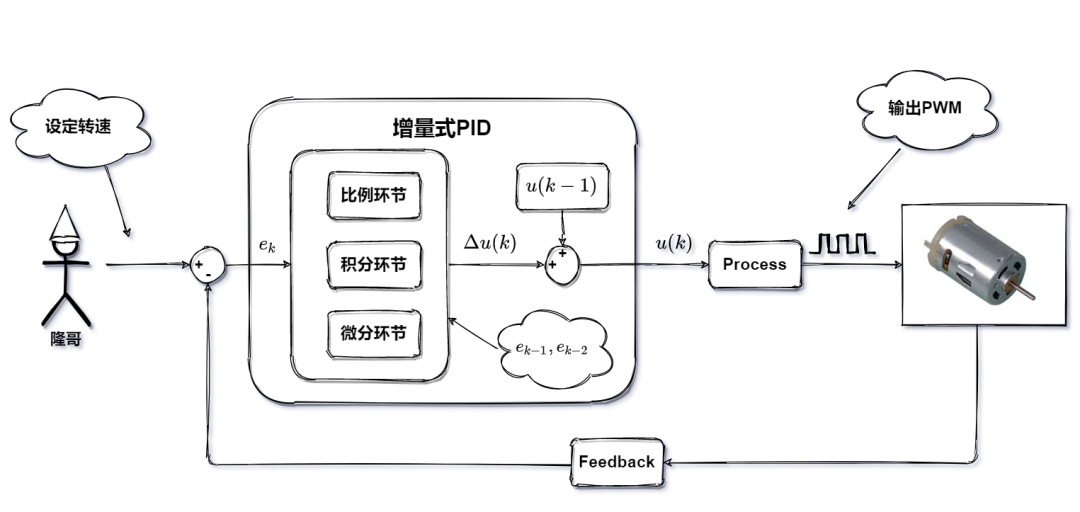
2.2 增量式PID
對于增量式PID來說;
- 隆哥對一個直流電機進行調速,設定了轉速為 1000;
- 這時由于反饋回來的速度和設定的速度偏差為 ,系統中保存上一次的偏差和上上次的偏差,這三個輸入量經過增量PID計算得到;
- 系統中還保存了上一次的PID輸出的,所以加上增量,就是本次控制周期的PID輸出——;
- 作為Process的輸入值(可以是PWM的占空比),最終Process輸出相應的PWM驅動直流電機;
- 反饋裝置檢測到電機轉速,然后重復以上步驟;
整體框圖如下所示;
所以這里不難發現,所謂增量式PID,它的特點有:
- 需要輸入歷史的偏差值;
- 計算得到的是PID輸出增量,因此每一次需要累加歷史增量最為當前的PID輸出;
下面簡單介紹一下如何實現增量式PID算法;
3 偽算法
previous02_error:=0//上上次偏差
previous01_error:=0//上一次偏差
integral:=0//積分和
pid_out:=0//pid增量累加和
//循環
//采樣周期為dt
loop:
//setpoint設定值
//measured_value反饋值
error:=setpoint?measured_value//計算得到偏差
proportion:=error-previous01_error//計算得到比例輸出
integral:=error×dt//計算得到積分累加和
derivative:=(error?2*previous01_error+previous02_error)/dt//計算得到微分
pid_delta:=Kp×error+Ki×integral+Kd×derivative//計算得到PID增量
pid_out:=pid_out+pid_delta//計算得到PID輸出
//保存當前的偏差和上一次偏差作為下一次采樣所需要的歷史偏差
previous02_error:=previous01_error
previous01_error:=error//保存當前偏差為下一次采樣時所需要的歷史偏差
wait(dt)//等待下一次采用
gotoloop
4 C語言實現
這里直接使用了TI公司的PID算法,做了積分抗飽和;具體可以參考controlSUITElibsapp_libsmotor_controlmath_blocksv4.2pid_grando.h
具體代碼如下所示;
pid_grando.h
/*=================================================================================
Filename:PID_GRANDO.H
===================================================================================*/
#ifndef__PID_H__
#define__PID_H__
typedefstruct{_iqRef;//Input:referenceset-point
_iqFbk;//Input:feedback
_iqOut;//Output:controlleroutput
_iqc1;//Internal:derivativefiltercoefficient1
_iqc2;//Internal:derivativefiltercoefficient2
}PID_TERMINALS;
//note:c1&c2placedheretokeepstructuresizeunder8words
typedefstruct{_iqKr;//Parameter:referenceset-pointweighting
_iqKp;//Parameter:proportionalloopgain
_iqKi;//Parameter:integralgain
_iqKd;//Parameter:derivativegain
_iqKm;//Parameter:derivativeweighting
_iqUmax;//Parameter:uppersaturationlimit
_iqUmin;//Parameter:lowersaturationlimit
}PID_PARAMETERS;
typedefstruct{_iqup;//Data:proportionalterm
_iqui;//Data:integralterm
_iqud;//Data:derivativeterm
_iqv1;//Data:pre-saturatedcontrolleroutput
_iqi1;//Data:integratorstorage:ui(k-1)
_iqd1;//Data:differentiatorstorage:ud(k-1)
_iqd2;//Data:differentiatorstorage:d2(k-1)
_iqw1;//Data:saturationrecord:[u(k-1)-v(k-1)]
}PID_DATA;
typedefstruct{PID_TERMINALSterm;
PID_PARAMETERSparam;
PID_DATAdata;
}PID_CONTROLLER;
/*-----------------------------------------------------------------------------
DefaultinitalisationvaluesforthePIDobjects
-----------------------------------------------------------------------------*/
#definePID_TERM_DEFAULTS{
0,
0,
0,
0,
0
}
#definePID_PARAM_DEFAULTS{
_IQ(1.0),
_IQ(1.0),
_IQ(0.0),
_IQ(0.0),
_IQ(1.0),
_IQ(1.0),
_IQ(-1.0)
}
#definePID_DATA_DEFAULTS{
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(1.0)
}
/*------------------------------------------------------------------------------
PIDMacroDefinition
------------------------------------------------------------------------------*/
#definePID_MACRO(v)
/*proportionalterm*/
v.data.up=_IQmpy(v.param.Kr,v.term.Ref)-v.term.Fbk;
/*integralterm*/
v.data.ui=_IQmpy(v.param.Ki,_IQmpy(v.data.w1,
(v.term.Ref-v.term.Fbk)))+v.data.i1;
v.data.i1=v.data.ui;
/*derivativeterm*/
v.data.d2=_IQmpy(v.param.Kd,_IQmpy(v.term.c1,
(_IQmpy(v.term.Ref,v.param.Km)-v.term.Fbk)))-v.data.d2;
v.data.ud=v.data.d2+v.data.d1;
v.data.d1=_IQmpy(v.data.ud,v.term.c2);
/*controloutput*/
v.data.v1=_IQmpy(v.param.Kp,
(v.data.up+v.data.ui+v.data.ud));
v.term.Out=_IQsat(v.data.v1,v.param.Umax,v.param.Umin);
v.data.w1=(v.term.Out==v.data.v1)?_IQ(1.0):_IQ(0.0);
#endif//__PID_H__
example
/*InstancethePIDmodule*/
PIDpid1={PID_TERM_DEFAULTS,PID_PARAM_DEFAULTS,PID_DATA_DEFAULTS};
main(){
pid1.param.Kp=_IQ(0.5);
pid1.param.Ki=_IQ(0.005);
pid1.param.Kd=_IQ(0);
pid1.param.Kr=_IQ(1.0);
pid1.param.Km=_IQ(1.0);
pid1.param.Umax=_IQ(1.0);
pid1.param.Umin=_IQ(-1.0);
}
voidinterruptperiodic_interrupt_isr(){
pid1.Ref=input1_1;//Pass_iqinputstopid1
pid1.Fbk=input1_2;//Pass_iqinputstopid1
PID_MACRO(pid1);//Callcomputemacroforpid1
output1=pid1.Out;//Accesstheoutputofpid1
}
5 總結
簡單總結了位置式PID算法和增量式PID算法的差異,參考了TI公司的增量式PID算法實現,對于不同的控制對象可以根據系統要求選擇合適的PID算法。
原文標題:干貨 | 什么是PID算法,增量式PID又是什么?
文章出處:【微信公眾號:電子工程世界】歡迎添加關注!文章轉載請注明出處。
審核編輯:湯梓紅
-
控制系統
+關注
關注
41文章
6620瀏覽量
110608 -
算法
+關注
關注
23文章
4612瀏覽量
92891 -
PID
+關注
關注
35文章
1472瀏覽量
85521
原文標題:干貨 | 什么是PID算法,增量式PID又是什么?
文章出處:【微信號:電子工程世界,微信公眾號:電子工程世界】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
教你用C語言實現位置式PID和增量式PID
在STM32如何去實現增量式PID算法
PID算法增量式算法

使用單片機和Arduino實現增量式PID位置式PID算法和PID庫免費下載

PID-基于增量式PID算法的無刷直流電機PWM調速研究






 工商網監
工商網監
評論