") MEH控制系統(tǒng)的原理及功能介紹
MEH控制系統(tǒng)的原理及功能介紹
MEH控制系統(tǒng)以高壓抗燃油為工作介質(zhì),以電液伺服閥為液壓接口設備,以高低壓調(diào)節(jié)閥油動機為執(zhí)行機構(gòu),控制給水泵汽輪機的轉(zhuǎn)速。本文以圖文形式介紹MEH控制系統(tǒng)原理及功能。
一、給水泵汽輪機電液控制系統(tǒng)(MEH)原理
該MEH以高壓抗燃油為工作介質(zhì),以電液伺服閥為液壓接口設備,以高低壓調(diào)節(jié)閥油動機為執(zhí)行機構(gòu),構(gòu)成一套完整的MEH控制系統(tǒng),控制給水泵汽輪機的轉(zhuǎn)速,滿足用戶的要求。
鍋爐給水泵汽輪機用于驅(qū)動大型電站鍋爐給水泵,滿足鍋爐給水的要求。MEH控制原理見圖1
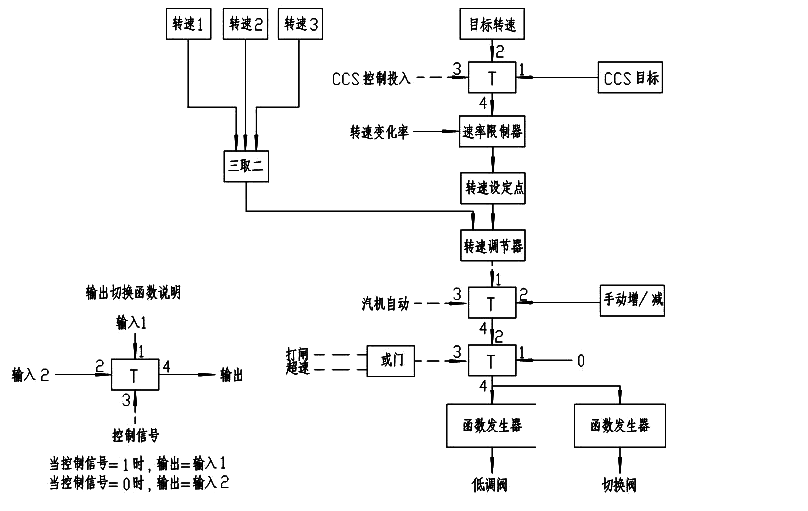
圖1MEH控制系統(tǒng)原理圖
機組在啟動和正常運行過程中,通過測速板采集機組的轉(zhuǎn)速,開關(guān)量通過開入板送到控制回路上,DPU將這些信號進行判斷、分析、計算,再綜合LVDT返回的信號,輸出控制信號到伺服閥,通過伺服閥來改變調(diào)節(jié)閥的開度,控制進入給水泵汽輪機的蒸汽流量,改變汽輪機的轉(zhuǎn)速。當汽機轉(zhuǎn)速變化時,它所控制的給水泵轉(zhuǎn)速也隨著變化,給水泵的出口流量變化,從而達到對鍋爐給水流量的要求。
機組一般有兩個汽源。一個工作汽源,來自主機四段抽汽;一個備用汽源,來自再熱器冷端蒸汽。工作汽源(主機四段抽汽)和備用汽源(再熱器冷端蒸汽)都用同一個蒸汽室—噴嘴室,采用噴嘴配汽。進汽系統(tǒng)示意圖見圖2。不同工程的工作汽源和備用汽源可能略有不同。
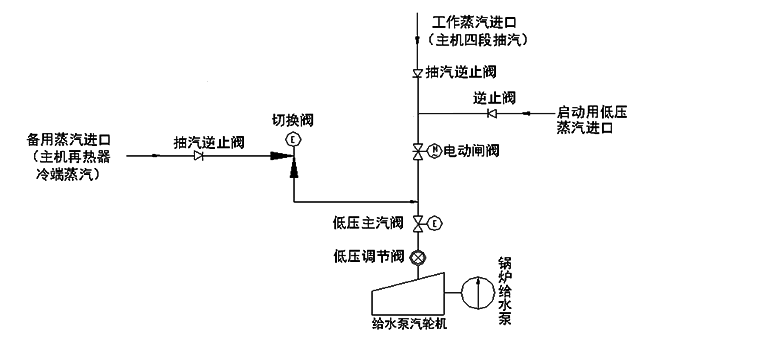
圖2MEH進汽系統(tǒng)示意圖
本機組采用低壓輔助汽源啟動。啟動過程中,輔汽通過逆止閥、電動閘閥、低壓主汽閥、低壓調(diào)節(jié)閥進入給水泵汽輪機,此時抽汽逆止閥、切換閥均關(guān)閉。隨著大機負荷的上升,工作蒸汽參數(shù)也隨之上升。當大機負荷大于汽源切換點時,工作蒸汽參數(shù)能夠滿足主機功率對給水量的要求,切除輔助啟動汽源,即在汽源切換點以上工況均由工作汽源(主機四段抽汽)做功,在運行轉(zhuǎn)速范圍:2840r/min~5945r/min內(nèi)連續(xù)平穩(wěn)運行,其最低轉(zhuǎn)速能維持給水泵最小流量循環(huán)工況。上述過程給水泵汽輪機轉(zhuǎn)速由低壓調(diào)節(jié)閥控制。
在大機降負荷時,工作蒸汽參數(shù)也隨之下降。大機從高負荷降到汽源切換點級以下,即大機定壓運行時,鍋爐蒸汽壓力保持不變,大機負荷降到40%以下時,給水泵的轉(zhuǎn)速要保證鍋爐蒸汽壓力保持不變;大機滑壓運行時,鍋爐蒸汽壓力隨負荷變化,大機負荷降到30%以下時,要保證給水泵最低運行轉(zhuǎn)速2840r/min。
若給水泵汽輪機低調(diào)閥開度到大于95%時,工作蒸汽參數(shù)仍不能滿足上述要求,則需切換到備用汽源(再熱器冷端蒸汽)。此時給水泵汽輪機的轉(zhuǎn)速由切換閥控制,實際轉(zhuǎn)速與給定轉(zhuǎn)速比較后得到一個差值,經(jīng)PID運算后,輸出閥門開度指令信號到切換閥。切換閥打開的同時低壓調(diào)節(jié)閥將開至全開,并且低壓進汽管道上的抽汽逆止閥自動關(guān)閉,即將給水泵汽輪機進汽切換為備用汽源(再熱器冷端蒸汽)做功。當實際轉(zhuǎn)速和目標轉(zhuǎn)速一致,即切換閥的開度反饋信號與閥門開度指令信號一致時,切換閥上電液伺服閥切斷油動機的進油、排油,切換閥開度保持。
在大機升負荷時,工作汽源參數(shù)和備用汽源參數(shù)均隨之上升。大機從低負荷上升到汽源切換點及以上,工作汽源參數(shù)能滿足主機功率對給水量的要求,則需切換到工作汽源做功。由于備用汽源參數(shù)上升,切換閥將逐漸關(guān)小以滿足主機功率對給水量的要求,并開始切換過程,切換過程中主機四段抽汽逆止閥將自動打開,待切換閥全關(guān)后切換過程完成,給水泵汽輪機轉(zhuǎn)速又由低壓調(diào)節(jié)閥控制。
二、控制系統(tǒng)主要功能
1、MEH控制系統(tǒng)有三種運行控制方式
①手動控制方式
手動控制方式為開環(huán)控制方式。在該方式時,操作員通過操作OIS上的“手動閥位設定”按鈕或“增”、“減”按鈕來設定閥位開度值,直接控制閥門的開度,達到控制轉(zhuǎn)速的目的。
②轉(zhuǎn)速自動控制方式
轉(zhuǎn)速自動控制方式是自動調(diào)節(jié)常用的方式之一,操作員通過操作OIS上的“手動/自動”按鈕可選擇將控制方式切換到轉(zhuǎn)速自動控制方式,并通過設定目標轉(zhuǎn)速及升速率,進行自動升速。
為了保證信號的可靠性,MEH系統(tǒng)將對從現(xiàn)場轉(zhuǎn)速傳感器測到的轉(zhuǎn)速信號進行三取二處理,得到一個可靠的實際轉(zhuǎn)速信號。若三路轉(zhuǎn)速中有兩路轉(zhuǎn)速信號故障,將判定系統(tǒng)轉(zhuǎn)速故障,切到手動控制方式。現(xiàn)場轉(zhuǎn)速信號送到測速板后,在測速板內(nèi)進行處理,轉(zhuǎn)變?yōu)閿?shù)字量信號送到控制回路,控制回路將此信號作為實際轉(zhuǎn)速輸入信號。實際轉(zhuǎn)速和給定轉(zhuǎn)速比較后得到一個差值,經(jīng)過PID計算后,控制回路輸出閥門開度指令信號到電液伺服閥,控制伺服閥動作,改變調(diào)節(jié)閥的開度,從而控制進入汽輪機的蒸汽流量,使汽輪機的轉(zhuǎn)速發(fā)生變化。當調(diào)節(jié)閥的開度反饋信號與閥門開度指令信號一致,即實際轉(zhuǎn)速和設定的目標轉(zhuǎn)速一致,此時電液伺服閥自動回到中間位置,切斷油動機的進油、排油,調(diào)節(jié)閥開度將保持,一個轉(zhuǎn)速自動調(diào)節(jié)過程結(jié)束。
轉(zhuǎn)速自動控制回路的PID參數(shù)能通過工程師站在線進行修改,這有利于操作人員根據(jù)實際情況對控制過程進行有效的干預,大大的提高了控制的可靠性和靈活性,更加適應現(xiàn)代自動控制的要求。
③鍋爐自動控制方式
要投入鍋爐自動控制方式,必須滿足下列條件:
a、MEH處于轉(zhuǎn)速自動控制方式;
b、鍋爐控制系統(tǒng)來的鍋爐給水流量信號在2800r/min~6000r/min之間;
c、實際轉(zhuǎn)速和鍋爐控制系統(tǒng)來的鍋爐給水流量信號相差在±25r/min內(nèi);
d、MEH接收到“CCS請求”信號。
當上述條件滿足,操作員操作OIS上的“CCS控制”按鈕,即可投入鍋爐自動控制方式。
在鍋爐自動控制方式下,MEH接收來自鍋爐控制系統(tǒng)的4-20mA控制信號,并轉(zhuǎn)換為MEH中的轉(zhuǎn)速信號,4mA對應2800r/min,20mA對應6000r/min,它們是線性的。此時,MEH僅僅作為一個執(zhí)行機構(gòu)。MEH接收到鍋爐控制系統(tǒng)的控制信號后,直接送到控制回路,作為目標值,MEH向鍋爐控制系統(tǒng)輸出一個4mA~20mA信號作為反饋信號。在鍋爐自動控制方式下,汽輪機轉(zhuǎn)速隨著鍋爐控制系統(tǒng)控制信號變化而變化。
鍋爐自動控制方式是一種更加完善的控制方式,它同時考慮了汽輪機和鍋爐的控制,它將整個電廠作為一個系統(tǒng)來控制,可以使控制過程更加的趨于合理化。
由于在鍋爐自動控制方式下,鍋爐控制系統(tǒng)來的控制信號是經(jīng)過控制回路進行過轉(zhuǎn)換的,所以,轉(zhuǎn)速自動控制回路能夠很好的跟蹤鍋爐自動控制回路統(tǒng),當從鍋爐自動控制方式切換到轉(zhuǎn)速自動控制方式時,不會產(chǎn)生任何擾動,能夠維持原來的狀態(tài)和運行控制參數(shù)。
在鍋爐自動控制方式下,如果上述條件中任意一項不滿足將切除鍋爐自動控制方式。
2、小機的掛閘和打閘
汽輪機的掛閘,就是一個高壓保安油壓的建立的過程。當機組滿足汽輪機已打閘、所有閥全關(guān)這兩個條件,操作員通過操作OIS上的掛閘按鈕,輸出掛閘指令信號去動作就地電磁閥,使高壓保安油壓建立,當MEH接收到高壓保安油壓建立信號后,通過邏輯判斷,掛閘成功,此時OIS上的掛閘按鈕狀態(tài)顯示為掛閘,整個掛閘過程結(jié)束。
汽輪機有三種打閘方式:第一種是集控室控制臺上的手動停機按鈕。第二種是當汽機轉(zhuǎn)速達到電氣超速動作轉(zhuǎn)速時,MEH控制回路輸出汽機打閘信號。第三種是當MEH接收到METS來的遮斷汽機的信號后,經(jīng)過繼電邏輯硬回路實現(xiàn)汽機打閘。
當汽機在運行過程中發(fā)生異常狀況時,需要緊急停機,可以通過操作集控室控制臺上的手動停機按鈕實現(xiàn)緊急停機,保護汽機的安全。
3、超速保護和超速試驗
MEH在汽機的正常運行中,軟件設有超速保護邏輯。若運行時汽輪機的實際轉(zhuǎn)速超過設定的超速保護值時,MEH輸出超速打閘信號,使現(xiàn)場的各個電磁閥動作,卸掉高壓保安油壓,使主汽閥和調(diào)節(jié)閥迅速關(guān)閉,蒸汽將無法進入汽機,轉(zhuǎn)速下降,保證了汽輪機的安全。
為了確保超速保護邏輯動作的準確性MEH設有電氣超速試驗。操作員通過操作OIS上的電氣超速試驗按鈕,將其置為試驗位,再設定目標轉(zhuǎn)速為超速保護動作轉(zhuǎn)速值,設定合適的升速率,開始升速。當汽輪機實際轉(zhuǎn)速達到超速保護動作轉(zhuǎn)速值時,MEH輸出超速打閘信號去動作現(xiàn)場的各個電磁閥,卸掉高壓保安油,使汽輪機停機。
4、閥門活動試驗
為了防止主汽門因長期處于全開狀態(tài)導致卡澀,MEH設置有閥門活動試驗功能。低壓主汽門做活動試驗時,操作員通過操作OIS上的主汽門試驗按鈕,將其置為投入,MEH便輸出閥門活動試驗指令信號去動作低壓主汽門上的活動試驗電磁閥,使低壓主汽門關(guān)閉。當MEH接收到閥門活動試驗到位信號,MEH使活動試驗電磁閥失電,低壓主汽門又重新開啟到全開位。當MEH接收到低壓主汽門全開信號,低壓主汽門活動試驗完畢。
5、高壓遮斷模塊遮斷電磁閥試驗
小機的停機電磁閥共有四只,為“兩并兩串”結(jié)構(gòu)。為了防止汽輪機長期運行時停機電磁閥卡澀,MEH設有遮斷電磁閥活動試驗,四只電磁閥只能單獨試驗。當操作相應的電磁閥活動試驗按鈕后,MEH就發(fā)出相應的試驗信號,使該電磁閥失電,從而引起相應的壓力開關(guān)動作,MEH收到壓力開關(guān)動作信號后,表示試驗成功,電磁閥重新帶電,至此,試驗結(jié)束。
6、閥門校驗
整定伺服系統(tǒng)靜態(tài)關(guān)系的目的在于使油動機在整個全行程上均能被伺服閥控制。閥位給定信號與油動機升程的關(guān)系為:
◆給定0-100對應行程0-100%
◆為保持此對應關(guān)系有良好的線性度,要求油動機上作反饋用的LVDT,在安裝時,應使其鐵芯在中間線性段移動。
◆在給水泵汽輪機啟動前,可分別對油動機快速地進行整定。
注意:必須確認主汽閥前無蒸汽,以免整定時,汽輪機失控。
為保證上述關(guān)系有良好的線性,可先進行零位校正。零位校正時,給定值為50,移動LVDT的安裝位置,使油動機行程為50%即可。
不同的電氣系統(tǒng)有不同的閥門靜態(tài)整定方法,具體參見各個系統(tǒng)的閥門靜態(tài)關(guān)系整定操作步驟。
一般在作完靜態(tài)關(guān)系的整定之后,還需進行線性度的測試。此時,在系統(tǒng)中發(fā)出開度指令,例如:要求開度指令=20.0,在就地測量閥門實際行程。記錄開度指令、閥門實際行程和閥門位置反饋,通常要求做一個來回的全行程記錄。要求閥門實際開度和閥門位置反饋之差不能大于閥門全行程的1%。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6622瀏覽量
110611 -
閥門
+關(guān)注
關(guān)注
4文章
469瀏覽量
22125 -
電氣系統(tǒng)
+關(guān)注
關(guān)注
1文章
356瀏覽量
24265
發(fā)布評論請先 登錄
相關(guān)推薦
DCS控制系統(tǒng)的主要功能介紹
PLC控制系統(tǒng)的主要功能介紹
伺服控制系統(tǒng)的分類方式和常見伺服控制系統(tǒng)介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論