 外骨骼輔助雙足行走機器人:帶輪子也可以上樓梯
外骨骼輔助雙足行走機器人:帶輪子也可以上樓梯
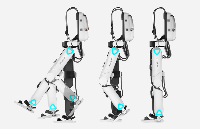
雙足的外骨骼機器人怎么又可以像帶輪子的車一樣向前運行呢,同時又可以像雙足機器人一樣上樓梯?看看這個雙足外骨骼輪式機器人就明白了。

在平路上,該外骨骼機器人是通過驅動輪滾動式的前行,前面2個小輪子作為支撐輪,在遇到樓梯的時候,前面兩個輪子收起變為雙足機器人開始爬樓梯,可以適應于帶樓梯的路面環境,給行動不便的和需要負重的人帶來更多的便利用途。
車輛模式
該外骨骼機器人的兩種模式只需一個按鈕即可激活,在車輛模式下可在平坦路面快速移動,在雙腿模式下,變成一對動力外骨骼的腿,讓使用者可以上下行走樓梯。
雙腿模式
同時該款外骨骼機器人也配備了攝像頭和人工智能算法,可以檢測和避開在運行中碰到的障礙物。在功能上可以幫助搬運和移動重物,使人們能夠在搬重物的時可以快速不費力地四處走動,同時也可以作為行動不便的人的行走和康復的工具,具有非常好的應用場景。
上樓梯狀態
那么在外骨骼機器人的驅動電機的研發上,深圳小象電動研發一款電機和減速器橫向排列的外骨骼機器人關節伺服電機系統,采用軸向磁場電機做為主動力電機,通過側向傳動機構傳遞至減速器輸出,實現了超扁平化大扭矩輸出的外骨骼關節電機系統。
超薄一體化外骨骼關節
為什么采用軸向磁場電機作為該方案的動力電機呢?
因為軸向磁場電機本身具有軸向尺寸小、重量輕和大扭矩的性能優勢,非常適合應用于外骨骼關節電機系統的應用,該外骨骼關節電機系統最大輸出扭矩可達80Nm,但重量僅為1kg,充分發揮了軸向磁場電機的大扭矩性能特性,在機器人上的應用非常廣泛。
審核編輯:符乾江
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28467瀏覽量
207352 -
盤式電機
+關注
關注
0文章
14瀏覽量
2198
發布評論請先 登錄
相關推薦
開源項目!能夠精確地行走、跳舞和執行復雜動作的機器人—Tillu
認識Tillu——機器人
Tillu是一款融合先進機器人技術與創造力的獨特機器人,旨在激發學習與創新!它由運行Debian操作系統的UNIHIKER驅動,利用強大的控制系統實現逼真的動作和動態交互
發表于 01-02 17:24
開源項目!OpenCat—— 一個全能的平價四足機器人
感到厭倦。現在孩子們可以在一種新型玩具上學習物理和編程。機器人專家可以在一個便宜得多的平臺上專注于他們的行走算法。軟件開發人員可以在一個寵物
發表于 12-16 11:44
步行助力外骨骼機器人
中它能夠替代醫療人員進行反復的康復工作,并能夠提供精準的關節運動姿態和保護。 國內下肢外骨骼系統的發展尚處于研究試驗階段,其技術難點在于外骨骼對于人體運動的順應性即外骨骼機器人的柔性。
【CW32開發】初探四足機器人
本項目使用8自由度舵機控制的四足機器人。主要用于愛好者學習參考。可實現基本控制姿態:前進、左轉、右轉、打滑、伸展、站立、躺平、擺手。有興趣的朋友,也可以增加新步態控制。

在NVIDIA Isaac Lab中訓練四足機器人運動
由于涉及復雜的動力學,為四足機器人制定有效的運動策略是機器人領域面臨的重大挑戰。在現實世界中訓練四足機器人上下

「知識講堂」外骨骼康復機器人醫療器械分類、標準、注冊指導原則
作為智慧康養創新引領者,邁步機器人深耕康復醫療器械領域多年,近期陸續有粉絲私信或留言,說自己剛涉足醫療器械不久,對外骨骼康復機器人比較感興趣,希望有更深度的了解。對此,小邁通宵達旦收集、整理了一份

北卡羅來納州立大學突破:模擬框架加速外骨骼機器人控制系統開發
在科技日新月異的今天,生物醫學工程領域迎來了一項重大突破。最新一期《自然》雜志上發表的研究成果,為我們揭示了一個由北卡羅來納州立大學蘇浩團隊開發的全新模擬框架,這一框架有望加速外骨骼機器人控制系統的開發,進一步推動外骨骼裝置在現
北卡羅來納州立大學:加速外骨骼機器人控制系統的研發
在科技日新月異的今天,生物醫學工程領域的進步尤為引人注目。近日,國際知名學術期刊《自然》雜志發表了一項重要研究成果,報道了北卡羅來納州立大學蘇浩團隊在生物醫學工程領域的一項重大突破——他們成功開發了一種模擬框架,這一框架有望極大加速外骨骼機器人控制系統的開發,從而推動
佐治亞理工開發通用機器人外骨骼控制技術
這個全新設計的系統主要依靠深度學習來快速,準確且靈活地保護人類。如今已經證實,這種外骨骼裝備能夠流暢地適應各種室外行走、站立以及攀爬樓梯或斜坡等操作能力。
「喜報」邁步機器人榮獲機器人應用典型案例獎
日前,在中國科學院深圳先進技術研究院的指導下,由深圳市機器人協會、《機器人與智能系統》雜志組織的第八屆深圳機器人年度評選揭曉榜單。邁步機器人憑借著基于柔性驅動器的

日本研發雙足混合機器人,水下行走、急轉彎自如
該篇文章的主要撰寫人和通訊作者,東京大學教授竹內昌治表示,生物混合型機器人是生物學與力學的巧妙結合,為機器人領域開辟了全新的視角。運用肌肉做動力源,他們成功創建了一款行動快捷且無聲的緊湊型機器人。
「外骨骼機器人」顛覆康復行業格局,重塑千億康復市場!
提到康復,你會想到什么?是汗如雨下進行康復訓練的患者,還是哼哧哼哧賣力扛大腿的康復治療師?何不花幾分鐘時間看完本文,一起走進這康復行業新世界!一、外骨骼機器人帶來的康復變革據《柳葉刀》數據顯示,我國






 工商網監
工商網監
評論