") 視覺成像技術(shù)幫助機(jī)器人和汽車看得更清楚
視覺成像技術(shù)幫助機(jī)器人和汽車看得更清楚
盡管機(jī)器人的眼睛沒有視網(wǎng)膜,但幫助它們更自然、更安全地觀察和與世界互動(dòng)的關(guān)鍵是眼科醫(yī)生辦公室里常見的光學(xué)相干斷層掃描(OCT)儀器。
許多機(jī)器人公司正在將一種成像技術(shù)集成到他們的傳感器包中,即光探測(cè)和測(cè)距,簡(jiǎn)稱LiDAR。目前,無人駕駛汽車開發(fā)商對(duì)該技術(shù)的關(guān)注和投資很大,該技術(shù)的工作原理與雷達(dá)類似,但它使用的是激光產(chǎn)生的短脈沖光,而不是發(fā)射寬帶無線電波并探測(cè)反射信號(hào)。
然而,傳統(tǒng)的time-of-flight激光雷達(dá)存在許多缺點(diǎn),使其難以在許多3D視覺應(yīng)用中使用。因?yàn)檫@需要探測(cè)非常微弱的反射光信號(hào),對(duì)于目前大部分的激光雷達(dá)系統(tǒng)的探測(cè)器,信號(hào)甚至很容易淹沒在環(huán)境光信號(hào)中。它的深度分辨率也很有限,在對(duì)高速公路或工廠車間等大片區(qū)域進(jìn)行密集掃描,通常需要很長(zhǎng)時(shí)間。為了應(yīng)對(duì)這些挑戰(zhàn),研究人員正轉(zhuǎn)向利用一種名為調(diào)頻連續(xù)波(FMCW)激光雷達(dá)的系統(tǒng)。
“FMCW激光雷達(dá)與OCT具有相同的工作原理,生物醫(yī)學(xué)工程領(lǐng)域自20世紀(jì)90年代初以來一直在發(fā)展OCT相關(guān)技術(shù),”在杜克大學(xué)Michael J. Fitzpatrick生物醫(yī)學(xué)工程杰出教授Joseph Izatt實(shí)驗(yàn)室工作的博士生Qian Ruobing說。“但30年前,沒有人知道自動(dòng)駕駛汽車或機(jī)器人會(huì)得到快速發(fā)展,所以O(shè)CT技術(shù)僅被用于組織成像。現(xiàn)在,為了讓它在其他新興領(lǐng)域發(fā)揮更大的作用,我們需要利用它超高的分辨率來獲得更大的距離和速度。”
在3月29日發(fā)表在《Nature Communication》上的一篇論文中,杜克大學(xué)的團(tuán)隊(duì)展示了相關(guān)研究,他們?cè)趯?duì)OCT研究中學(xué)習(xí)到的一些方法,可以將之前的FMCW激光雷達(dá)數(shù)據(jù)吞吐量提高25倍,同時(shí)仍能實(shí)現(xiàn)亞毫米深度精度。
OCT是一種光學(xué)模擬超聲波,它的工作原理是將聲波發(fā)送到物體上,然后測(cè)量它們返回的時(shí)間。為了計(jì)算光波的返回時(shí)間,OCT設(shè)備測(cè)量了它們的相位與相同的光波相比移動(dòng)了多少,這些光波經(jīng)過相同的距離,但沒有與另一個(gè)物體相互作用。
FMCW激光雷達(dá)采用了類似的方法,只是做了一些調(diào)整。 該技術(shù)發(fā)出的激光束在不同頻率之間不斷變換。 當(dāng)探測(cè)器收集光來測(cè)量其反射時(shí)間時(shí),它可以區(qū)分特定的頻率模式和任何其他光源,這使得它可以在各種照明條件下高速工作。然后,它測(cè)量無阻礙光束下的任意相移,這是一種比目前的激光雷達(dá)系統(tǒng)更精確的確定距離的方法。
“看到我們幾十年來研究的生物細(xì)胞規(guī)模的成像技術(shù)可以轉(zhuǎn)化為大規(guī)模、實(shí)時(shí)的3D視覺技術(shù),這是非常令人興奮的,”Izatt說。“這正是機(jī)器人安全地觀察人類并與人類互動(dòng)所需要的能力,甚至在增強(qiáng)現(xiàn)實(shí)中,用實(shí)時(shí)3D視頻取代虛擬化身。”
之前使用激光雷達(dá)的大部分工作都依賴于旋轉(zhuǎn)鏡子來掃描被反射的激光。雖然這種方法很有效,但無論它使用的激光有多強(qiáng),它從根本上受到機(jī)械反射鏡速度的限制。
杜克大學(xué)的研究人員使用的是一種衍射光柵,它的工作原理類似于棱鏡,可以將激光分解成彩虹般的頻率,當(dāng)它們離開光源時(shí)就會(huì)散開。因?yàn)樵嫉募す馊匀辉诳焖俚卦谝粋€(gè)頻率范圍內(nèi)掃描,這意味著掃激光雷達(dá)光束的速度要比機(jī)械反射鏡的旋轉(zhuǎn)速度快得多。這使得系統(tǒng)能夠在不損失深度和定位精度的情況下快速覆蓋廣泛的掃描區(qū)域。
雖然OCT設(shè)備是用于測(cè)量e物體內(nèi)部幾毫米深的微觀結(jié)構(gòu)的,但機(jī)器人3D視覺系統(tǒng)只需要定位人體尺度物體的表面。為了實(shí)現(xiàn)這一目標(biāo),研究人員縮小了OCT使用的頻率范圍,只尋找從物體表面反射產(chǎn)生的峰值信號(hào)。這使系統(tǒng)的分辨率降低了一點(diǎn),但成像范圍和速度比傳統(tǒng)的激光雷達(dá)要大得多。
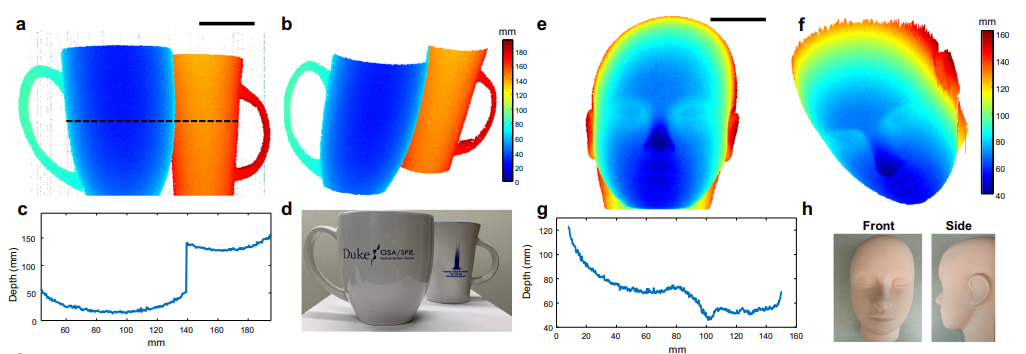
圖1:真實(shí)世界物體的視頻速率3D成像結(jié)果。a–d軸向間隔》9 cm的兩個(gè)陶瓷咖啡杯的成像結(jié)果;e–h人體頭部模型的成像結(jié)果
結(jié)果顯示,F(xiàn)MCW激光雷達(dá)系統(tǒng)實(shí)現(xiàn)了亞毫米定位精度,數(shù)據(jù)吞吐量比之前的演示提高了25倍。結(jié)果表明,該方法足夠快速和準(zhǔn)確,可以實(shí)時(shí)捕捉到人體運(yùn)動(dòng)部位的細(xì)節(jié),比如點(diǎn)頭或握緊的手。
lzatt說:“就像數(shù)碼相機(jī)已經(jīng)無處不在一樣,我們的愿景是開發(fā)新一代基于激光雷達(dá)的3D相機(jī),這種相機(jī)速度快,功能強(qiáng)大,能夠?qū)?D視覺集成到各種產(chǎn)品中。”“我們周圍的世界是3D的,所以如果我們想讓機(jī)器人和其他自動(dòng)化系統(tǒng)與我們自然而安全地互動(dòng),它們需要能夠看到我們,就像我們可以看到它們一樣。”
審核編輯 :李倩
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28524瀏覽量
207533 -
成像技術(shù)
+關(guān)注
關(guān)注
4文章
292瀏覽量
31474 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3991瀏覽量
190080
原文標(biāo)題:視覺成像技術(shù)幫助機(jī)器人和汽車看得更清楚
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+兩本互為支持的書
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
柔性機(jī)器人和剛性機(jī)器人有什么區(qū)別?

焊接機(jī)器人視覺控制技術(shù)有哪些組成
工業(yè)機(jī)器人視覺技術(shù)的應(yīng)用分為哪幾種?
機(jī)器人視覺與計(jì)算機(jī)視覺的區(qū)別與聯(lián)系
機(jī)器人視覺的應(yīng)用范圍
機(jī)器人視覺的作用是什么
基于FPGA EtherCAT的六自由度機(jī)器人視覺伺服控制設(shè)計(jì)
視覺機(jī)器人焊接的研究現(xiàn)狀

并聯(lián)機(jī)器人和串聯(lián)機(jī)器人的區(qū)別是什么?
協(xié)作機(jī)器人和工業(yè)機(jī)器人區(qū)別在哪?
富唯智能機(jī)器人集成了協(xié)作機(jī)器人、移動(dòng)機(jī)器人和視覺引導(dǎo)技術(shù)
紅外熱成像設(shè)備在機(jī)器人領(lǐng)域的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論