 淺談自動駕駛的主要算法模塊
淺談自動駕駛的主要算法模塊
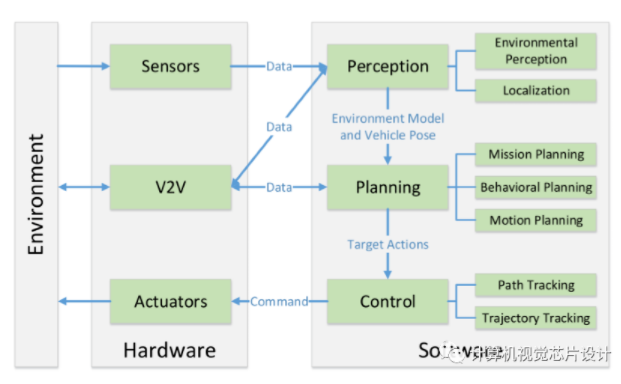
相信大家對自動駕駛中的感知應該很熟悉了,今天我們花點時間來看看規劃和控制是怎么玩的。 當然傳統的做法是感知,規劃和控制相對獨立的,但是隨著自動駕駛的崛起,特別基于深度學習的崛起,基于數據驅動的算法取得了很廣泛的應用。今天我們一起大概回顧一下規劃和控制的算法設計。先來看一張自動駕駛的主要算法模塊, 這里主要講規劃和控制部分。
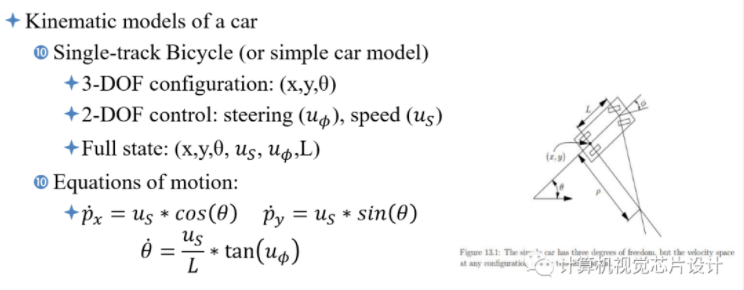
首先要對汽車進行動力學建模, 汽車具有位置,方向,加速度還有轉向角度,當然如果考慮摩擦力,
其中規劃分為路徑規劃,行為規劃還有運動規劃,參見下圖:
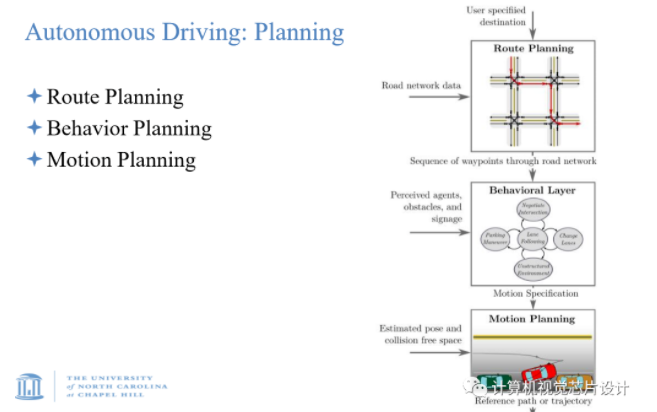
Route Planning:路線規劃與尋找從給定起點到目的地的最佳全球路線有關,偶爾會補充實時交通信息,典型算法包括A* 和 Dijkstras,但是他們可擴展性不好,必須要有大規模算法擴展算法,這也是目前研究方向之一。
Behavior Planner: 做出臨時決策以與其他特工正確互動并遵守規則限制,從而產生局部目標,例如改變車道,超車或通過交叉路口。利用有限元算法可以用得上。
Motion Planning:生成適當的路徑和/或動作組以實現局部目標,最典型的目標是在避免障礙物碰撞的同時達到目標區域。
當然motion Planing 又可以分為三類:
complete planing:完整的計劃-在配置空間中的連續計劃,空間維數很大。 一般計算量超乎目前芯片能力。
Combinatorial Planning: 對配置空間進行精確分解的離散計劃, 一般會降低維數處理。
Sample-Based planning:在空間中采樣以查找無碰撞且鏈接的控件/位置,一般不是完全的解空間,但是計算復雜度降了下來。因保證概率完整性而很受歡迎,也就是說,給定足夠的時間來檢查無限數量的樣本,如果解存在,將找到解的概率收斂為一個。
最后我們簡單回顧一下自動駕駛里面應用到的控制算法部分,簡單分為三個部分:
PID
我們大學階段就學過的PID控制,傳統的控制算法, 比例積分微分控制器:控制回路反饋機制,廣泛用于工業控制系統和其他需要連續調制控制的應用中。當然PID控制可以廣泛的應用到各個不同的領域中去。
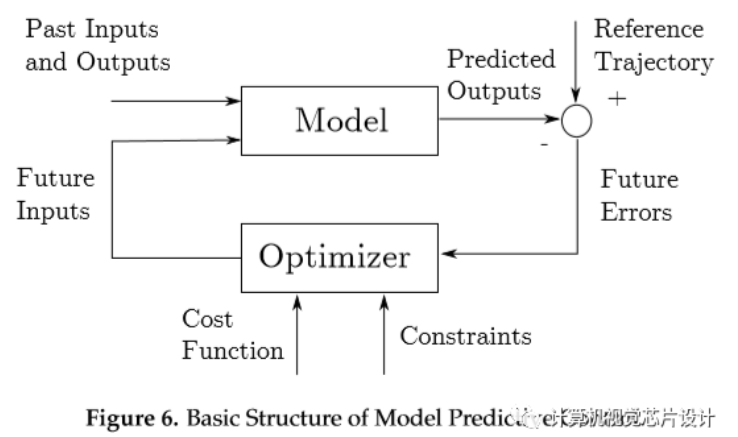
Model Predictive Control
模型預測控制器:控制環依賴于底層系統模型來生成前饋控制
- 在每個時間,通過為預測范圍解決開環優化問題來計算控制
- 應用計算的控制序列的第一個值
- 在下一步,獲取系統狀態并重新計算
MPC在汽車環境中的使用:牽引控制/制動控制/轉向/車道保持。
Path/Trajectory tracking
給定運動計劃者計算出的路徑/軌跡,我們使用控件來遵循或“實現”路徑。路徑/軌跡跟蹤的許多方法:純粹追蹤;AutonoVi;運動自行車以及模型預測控制。
盡管在規劃算法領域也展示了令人印象深刻的功能,但我們期望在動態環境中改善實時規劃方面有進一步的發展。最近的相關研究正在朝著更好地包括機器人差動運動約束和在重新計劃的后續迭代之間保留知識的有效策略的方向發展。
在最近幾年中,自主車輛控制領域存在著重大的理論進展。但是,許多突破性結果僅在仿真中進行了測試。確保自治系統嚴格遵循高層決策流程的意圖至關重要。基于模型預測控制(MPC)的技術因其靈活性和性能而成為該領域的活躍研究主題。計算時間在實時應用程序中至關重要,因此模型選擇和MPC問題表述在一個應用程序與另一個應用程序之間會有所不同。
已經表明,車輛協作可以在感知和計劃模塊中實現更好的性能,但是在改善多車輛協作算法的可伸縮性方面還有很大的進步空間。此外,盡管硬件已經針對V2V通信進行了標準化,但是尚不存在有關在車輛之間傳遞哪些信息內容的標準。
自動駕駛汽車是復雜的系統。因此,對于研究人員來說,劃分AV軟件結構并集中于單個子系統的整體發展,通過改進這些單獨的子系統來實現新功能,將更加實用。自治系統研究中的一個關鍵但有時被忽略的挑戰是所有這些組件的無縫集成,以確保不同軟件組件之間的交互是有意義和有效的。由于整個系統的復雜性,很難保證本地過程的總和會導致系統達到預期的最終輸出。平衡系統中各個流程之間的計算資源分配也是一個關鍵挑戰。認識到自動駕駛汽車研究發展的迅速步伐,我們熱切期望不久的將來將克服上述挑戰,并使自動駕駛汽車在城市交通系統中更加普及。
-
自動駕駛
+關注
關注
784文章
13904瀏覽量
166727 -
深度學習
+關注
關注
73文章
5511瀏覽量
121350
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論