 淺談機器人視覺抓件系統不到位問題
淺談機器人視覺抓件系統不到位問題
最近視覺抓件系統一直會出現抓取零件不到位的問題。下面我將分析一下問題出現的原應。
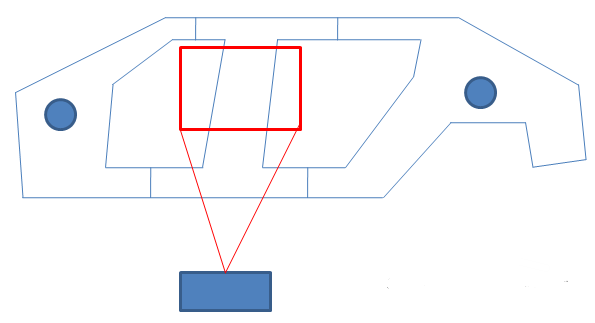
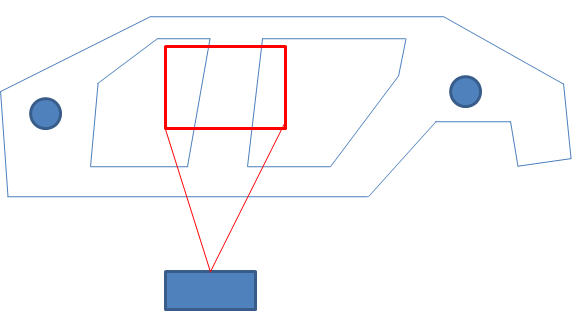
單相機測點,測量車身側圍外板B /內板B,計算出的車身整體偏差值是B柱的旋轉和變化量。因此對于車身整體的變化量存在偏差。零件大的組裝件容易出現這種問題。因此要區分對待側圍內板和側圍外部的抓取視覺的計算方法。
1.車身側圍內板:
應設置兩個相機對應機器人抓手上的定位銷附近,計算兩個定位空的偏差值。由于機器人抓手是固定的所以,要計算出兩空的變化對應車身坐標系的整體變化值。這樣計算出的機器人BASE坐標系下的偏差值最準確,機器人的抓取效果最好。
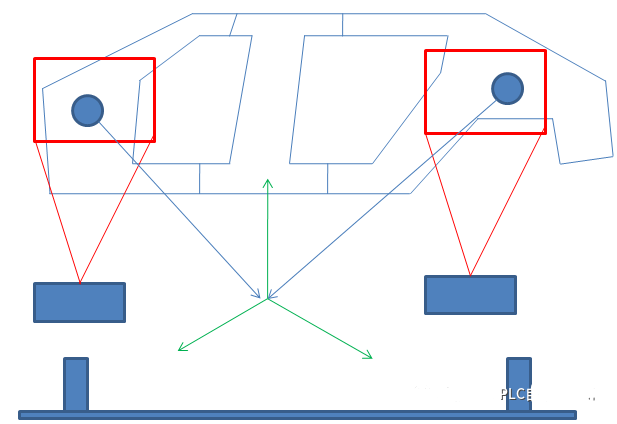
如果機器人抓手不使用定位銷定位,則可以使用一個相機的方法進行粗略抓取,問題會很少。
2.車身側圍外板:
側圍外板是一個整體件,用一個相機照車身B柱是沒有問題的。整體大件由于不需要搭接工藝,因此可以使用一個相機和定位銷定位抓取的方法。

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28521瀏覽量
207529
發布評論請先 登錄
相關推薦
機器人視覺——機器人的“眼睛”
的,也是急需的,它是保證機器人能夠工作于人類生活環境的重要條件。在工作中圖像采集速度較低,以及圖像處理需要較長時間,給系統帶來明顯的時滯。而機器視覺產品的引進,極大的解決了這一題目。
發表于 01-23 15:02
碼垛機器人夾抓可以實現多少種用途
``力泰科技資訊:碼垛機械手作為工業碼垛機器人的重要組成部分之一,可根據不同的產品,設計不同類型的機械夾抓,從而讓碼垛機器人具備效率高、質量好、適用范圍廣、成本低等優勢,并能很好地完成碼垛工作。夾
發表于 08-15 09:55
LabVIEW 的Tripod 機器人視覺處理和定位研究
為對幾何體的識別和抓放過程?利用邊緣提取、濾波去噪、圓心檢測等算法采用LabVIEW視覺模塊及其庫函數進行了圖像的預處理、特征提取以及中心點定位?研究結果表明基于LabVIEW的Tripod機器人
發表于 06-01 06:00
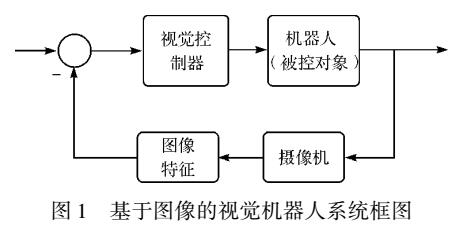
基于圖像的機器人視覺伺服系統該怎么設計?
制造出像人一樣具有智能的能替代人類勞動的機器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機器人的研究中,具有視覺
發表于 09-27 08:07
機器人視覺與機器視覺有什么不一樣?
的知識,來判定這些零件是不是不良品。某種程度上來說,你可以認為機器視覺是計算機視覺的孩子,因為它使用計算機視覺和圖像處理的技術和算法。但是,
發表于 08-28 10:48
深圳機器人上下料視覺定位流程講解
先拍再抓和先抓再拍的區別 先拍再抓要簡單得多,拍照后,視覺給機器人糾偏位置,然后下去吸,這樣能保證每次取料位置一致。 放料的時候不用管,只用走一個固定的示教點即可。 先抓再拍則因
發表于 04-07 12:06
四元數數控:工業機器人使用機器視覺系統的原因
和提高工作效率,就必須引入機器視覺技術來實現對目標的識別和定位。目前,裝備了機器視覺系統的工業機器人已經被應用于許多領域。在許多自動化的生產
發表于 04-29 09:42
Tripod機器人視覺系統
過程簡化為對幾何體的識別和抓放過程。利用邊緣提取、濾波去噪、同心檢測等算法,采用LabVIEW視覺模塊及其庫函數,進行了圖像的預處理、特征提取以及中心點定位。研究結果表明,基于LabVIEW的Tripod機器人
發表于 03-27 14:57
?0次下載
機器人視覺抓件系統抓取零件不到位的原因
單相機測點,測量車身側圍外板B /內板B,計算出的車身整體偏差值是B柱的旋轉和變化量.因此對于車身整體的變化量存在偏差.零件大的組裝件容易出現這種問題.因此要區分對待側圍內板和側圍外部的抓取視覺的計算方法.
發表于 03-30 10:47
?614次閱讀
大眾機器人視覺抓件系統出現抓取零件不到位的問題
單相機測點,測量車身側圍外板B /內板B,計算出的車身整體偏差值是B柱的旋轉和變化量.因此對于車身整體的變化量存在偏差.零件大的組裝件容易出現這種問題.因此要區分對待側圍內板和側圍外部的抓取視覺的計算方法.
發表于 04-17 12:29
?436次閱讀





 工商網監
工商網監
評論