") 水下機器人及仿生傳感器現(xiàn)狀
水下機器人及仿生傳感器現(xiàn)狀
作者:郭明博,揚州大學(xué)
來源:《流體測量與控制》(2022年第1期)、溪流之海洋人生
前言
傳感器性能的優(yōu)劣直接決定了移動機器人的性能,并起到至關(guān)重要的作用。近年來,水下機器人傳感技術(shù)在海洋工程和海洋資源勘探領(lǐng)域受到了廣泛關(guān)注。一方面,水下機器人需要感知環(huán)境,進行自主導(dǎo)航和避障;另一方面,水下機器人還依賴于傳感技術(shù)的保障來執(zhí)行各種實際應(yīng)用的任務(wù),例如水下目標(biāo)檢測、水下機器人抓取和水下高精度3D測量等。因此,水下機器人傳感技術(shù)發(fā)揮著越來越重要的作用。
在水下環(huán)境中,如果能夠感知到流速和壓力的波動變化的能力,就能夠?qū)崿F(xiàn)實時狀態(tài)反饋、對其他航行器的跟蹤以及對水下有利的動力條件的識別等功能。大多數(shù)水下傳感技術(shù)依賴于聲信號(聲吶)、光信號、電磁信號和仿生傳感器。這些水下傳感器的原理及特點概述具體如下:
(1)聲吶。聲吶是通過測量聲波脈沖的傳播時間和相位差來對水下物體的位置進行估測。聲波脈沖可以在更長的范圍內(nèi)工作,且不會受到水質(zhì)濁度的影響。雖然水聲傳感方法具有較大的傳感范圍,但分辨率較低,限制了水下聲吶的實際應(yīng)用。
(2)光學(xué)傳感器。光學(xué)傳感器是通過捕獲周圍環(huán)境的光信號從而獲取周圍環(huán)境的信息,能夠提供更高的分辨率。然而,由于復(fù)雜的水下光照條件(吸收和散射),光學(xué)傳感器只能實現(xiàn)短程的傳感應(yīng)用。
(3)電磁傳感器。基于電磁信號的傳感器可以應(yīng)用于水下環(huán)境,并對距離進行精確測量。然而,水下環(huán)境電磁場可能會干擾電磁傳感器的測量精度。
(4)仿生傳感器。近年來,研究人員對仿生傳感技術(shù)開展大量研究并獲得廣泛關(guān)注。有研究小組將哺乳動物和昆蟲的觸須作為陸地機器人傳感器設(shè)計的靈感,后來將這種靈感擴展到水下傳感器的設(shè)計應(yīng)用中。與陸地上通過與物體直接接觸所收集信息的觸須傳感器不同,在液體環(huán)境中,移動和靜止的物體會產(chǎn)生流動或擾動,這些擾動信號能夠被遠處的觸須傳感器檢測到。水下生物利用觸須進行感知和跟蹤的物理機制,可能與其觸須的幾何特征結(jié)構(gòu)所提供的結(jié)構(gòu)動力學(xué)、排列在生物體表面上的觸須陣列配置以及每個觸須基部的機械感受器的動力學(xué)組合有關(guān)。
觸須傳感器相比于其他傳感器(包括激光、聲吶和紅外傳感器)具有一定的優(yōu)勢。觸須傳感器設(shè)計相對容易,成本低廉。觸須傳感器可以通過掃描模式提供距離隨時間變化的信息,同時,還可以提供目標(biāo)物的形狀信息。在近距離內(nèi),多個觸須還可以提供周圍環(huán)境空間信息。觸覺信號對不同的環(huán)境條件是不會發(fā)生變化的。相比之下,紅外或聲吶傳感器會受到探測對象類型及環(huán)境的影響,其反射信號可能會發(fā)生變化。因此,觸須傳感器被廣泛用于水下傳感等應(yīng)用。本文將對水下環(huán)境中觸須傳感器的應(yīng)用研究進行詳細闡述。
水下機器人及仿生傳感器現(xiàn)狀
許多國家對水下機器人進行了長期研究。例如,美國軍方設(shè)計了“藍鰭”自主水下航行器,如圖1(a)所示,它可以執(zhí)行自主水下導(dǎo)航和目標(biāo)檢測,并在2014年搜索失蹤的馬來西亞航空公司MH370客機任務(wù)中發(fā)揮了重要作用。
俄羅斯設(shè)計了“和平1號”和“和平2號”水下機器人,這是世界上唯一一對能夠進行水下協(xié)同探測的載人潛水器。德國開發(fā)了名為“深海C”的水下機器人,它是一種4000m的水下航行器,可以在深海中連續(xù)工作60h。法國開發(fā)了“VICTOR6000”,如圖1(b)所示,這是一種通過電纜操縱的水下機器人,可以獲取高質(zhì)量的水下光學(xué)圖像。英國開發(fā)了全自動“Autosub6000”潛艇,如圖1(c)所示,該潛艇安裝了電池和傳感器,能夠獨立導(dǎo)航。
日本開發(fā)了一種深海水下機器人,名為“Kaiko”ROV,如圖1(d)所示,安裝有各種水下傳感器,該潛水器已經(jīng)潛水296次。中國也對水下機器人進行了廣泛的研究。例如,沈陽自動化研究所開發(fā)的“乾隆”和“海斗”水下機器人,如圖1(e)、圖1(f)所示,這些機器人均配備了聲吶、攝像機和燈光裝置,已經(jīng)完成了從海面到海床的不同深度的各種各樣水下任務(wù)。中國船舶科學(xué)研究中心、沈陽自動化研究所開發(fā)了“蛟龍”號和“芬多哲”號載人水下潛艇用于深海勘探,如圖1(g)、圖1(h)所示。此外,哈爾濱工程大學(xué)還開發(fā)了“橙鯊”和“海嶺”等水下機器人,這些水下機器人通過安裝各種水下傳感器實現(xiàn)對水下環(huán)境的探測。中國科學(xué)院自動化研究所設(shè)計的“仿生海豚”水下機器人可實現(xiàn)在800m深的水下進行連續(xù)作業(yè)。
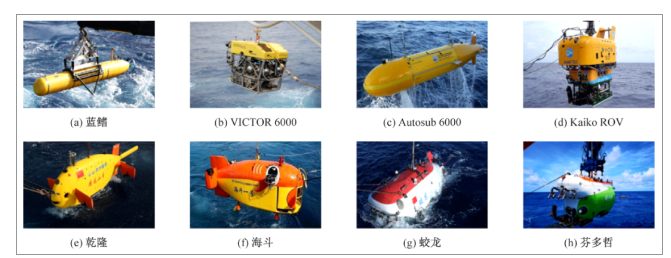
圖1 水下機器人
在海洋生物中,海豹可以利用其具有的橢圓形橫截面的觸須來辨別水流方向。具有橢圓形橫截面的胡須,以及位于海豹底部的面頰神經(jīng)作為傳感元件的觸須,當(dāng)水流來自不同方向時,其觸須將具有不同的特征尺寸,從而導(dǎo)致了觸須上阻力的不同。由于觸須內(nèi)不存在神經(jīng),阻力將這些應(yīng)力信息傳遞到觸須底部的臉頰上,并為海豹產(chǎn)生感應(yīng)信號。受此啟發(fā),使用韌性樹脂通過立體光刻技術(shù)制造的高縱橫比橢圓柱,用于承受水下擾動產(chǎn)生的壓力梯度信息,模擬實現(xiàn)了海豹觸須與水流相互作用的新型仿生傳感器,該仿生傳感器被用于港口來獲取水下擾動的信息。該仿生傳感器的結(jié)構(gòu)示意圖如圖2所示,由傳感膜片和叉指電極所構(gòu)成,用于承受從支柱轉(zhuǎn)移的應(yīng)力并產(chǎn)生信號,類似于海豹胡須底部臉頰的神經(jīng)。
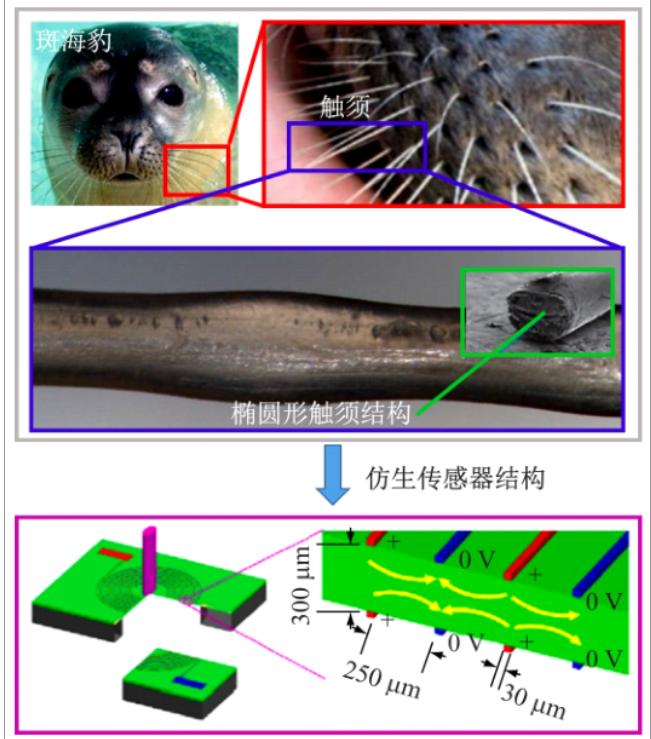
圖2 傳感器結(jié)構(gòu)
觸須與物體接觸的示意圖如圖3所示。圖中,觸須傳感器樞軸點到接觸點之間的距離為徑向距離,θ0表示延伸角,λ是位置h處傳感器測量的偏轉(zhuǎn)角,傳感器θ1處的切向角為θ1=θ0-λ。
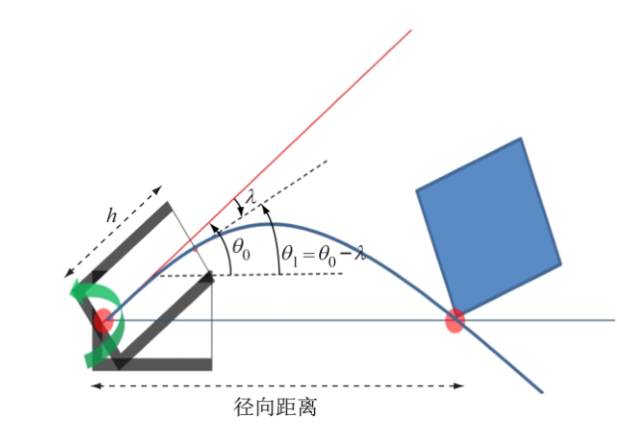
圖3 主動觸須傳感器系統(tǒng)
假設(shè)在觸須上有一個與目標(biāo)物體的單點接觸,由于觸須具有彎曲剛度,如果目標(biāo)對象是圓形的,那么觸須上的接觸點在擾動過程中將發(fā)生移動,其與基座的接觸距離也將發(fā)生改變,從而獲得目標(biāo)對象的形狀信息。如果目標(biāo)對象有一個銳角,那么當(dāng)觸須在目標(biāo)對象的表面上發(fā)生滑動時,接觸距離將會保持不變。假設(shè)一個觸須可以對一個點接觸的距離進行估測,那么一組觸須就可以收集目標(biāo)對象或周圍環(huán)境的更多信息。多個觸須有助于對目標(biāo)物體的距離及形狀進行檢測和識別。
水下傳感器應(yīng)用現(xiàn)狀
1、水聲傳感器
水聲測距/成像傳感器主要包括單波束聲吶、側(cè)掃聲吶和多波束聲吶。單波束聲吶通過接收傳感器所發(fā)出的短脈沖聲信號波束,并根據(jù)行程時間對淹沒物體的深度進行測量。側(cè)掃聲吶由控制單元、拖曳體、電纜和記錄器等子模塊組成,旨在詳細對地形、地質(zhì)及礦物信息進行測量,并可以執(zhí)行對目標(biāo)的搜索和跟蹤。
多波束聲吶是多個單波束聲吶的組合,可通過行程時間獲得水下目標(biāo)的高精度方向和深度值信息。水聲定位傳感器可以對被測物體(水下機器人)的位置進行測量。由于聲吶可以對中遠程水聲圖像的數(shù)據(jù)進行獲取,因此,聲吶被廣泛用于水下目標(biāo)的檢測和跟蹤。基于聲吶的目標(biāo)檢測和跟蹤是通過對采集數(shù)據(jù)的精確處理實現(xiàn)的,這種方法耗時且影響聲吶傳感器的性能。
2、水下電磁感應(yīng)傳感器
水下電場傳感可使機器人在復(fù)雜的水下環(huán)境中進行通信,并有效避免聲學(xué)多徑效應(yīng)。在南美洲電鰻和非洲管魚的啟發(fā)下,研究人員開發(fā)了一種基于仿生電場的通信系統(tǒng),可以在復(fù)雜的水下環(huán)境中進行有效通信。水下磁感應(yīng)具有隱蔽性高、探測性能強、定位精度高等優(yōu)點,因此,基于磁感應(yīng)的水下傳感器可以在復(fù)雜的水下環(huán)境條件下工作。例如,美國和加拿大海軍在白令海峽周圍的冰山上部署了電磁感應(yīng)電極,并與衛(wèi)星定位系統(tǒng)配合,成功探測到蘇聯(lián)的“特雷薩拉”核潛艇。
3、水下仿生傳感器
為了提高水下機器人的感知能力,基于仿生原理的觸須傳感器被研究人員開發(fā)并應(yīng)用。側(cè)線是魚的一個感應(yīng)器官,可以感知周圍水流的變化,從而幫助魚在黑暗條件下感知周圍的環(huán)境。受此啟發(fā),人工側(cè)線傳感器被開發(fā)并應(yīng)用于對實際環(huán)境的感知。觸須是水下生物的重要感知器官,被用于識別、定位和跟蹤獵物。受海豹觸須的啟發(fā),研究人員開發(fā)了許多人造觸須傳感器,并在水下設(shè)備中獲得應(yīng)用。
在海洋結(jié)構(gòu)物中,圍繞圓柱形立管的支腿由于會引起結(jié)構(gòu)的振動,給海洋工程帶來了工程難題。通過對海豹的觸須進行研究,將振動和仿生設(shè)計相結(jié)合,揭示圓柱形結(jié)構(gòu)物周圍流體流動的基本物理原理(海豹的觸須如何使它們能夠感知環(huán)境),設(shè)計出了水下流量傳感器。安裝在自主水下航行器(AUV)上的這種傳感器可以有效地提高航行器的導(dǎo)航能力。
仿生流量傳感器及其應(yīng)用
受海洋生物觸須的啟發(fā),近年來研究人員設(shè)計并制造了多種具有觸須狀結(jié)構(gòu)的流量傳感器。仿生流量傳感器通常由高縱橫比圓柱結(jié)構(gòu)(受觸須啟發(fā))和傳感基座(受神經(jīng)觸須毛囊啟發(fā))所組成。當(dāng)觸須結(jié)構(gòu)遇到穩(wěn)定或動態(tài)的流動刺激時,它會偏轉(zhuǎn)并在傳感底座中產(chǎn)生高彎曲應(yīng)力,該應(yīng)力被轉(zhuǎn)換為與流動刺激成比例的可測量的電信號。將傳感基座處的機械形變轉(zhuǎn)換為電信號輸出的傳感原理可以是電阻式(例如使用應(yīng)變計)、壓阻式(例如使用石墨烯作為傳感材料)、電容式、壓電式或光電式。仿生觸須傳感器可降低產(chǎn)生的噪聲,提高高雷諾系數(shù)下流量傳感器的信噪比。
與水下生物相比,目前的人工水下傳感器在檢測精度、距離、靈敏度等技術(shù)指標(biāo)上還存在較大差距,而且在傳感器的功耗和體積上也有很多方面需要改善。如何將各種環(huán)境信息轉(zhuǎn)化為電信號,從而得到周圍環(huán)境的信息并進行自主處理是水下傳感器的核心,也是未來觸須傳感器在水下航行器、水下結(jié)構(gòu)物監(jiān)測中獲得廣泛應(yīng)用的關(guān)鍵。通過增強現(xiàn)有仿生傳感器的信息轉(zhuǎn)換能力,開發(fā)新型觸須傳感器材料,多類型觸須傳感器融合,將會是觸須傳感器在水下獲得應(yīng)用的必經(jīng)之路和挑戰(zhàn)。
結(jié)語
基于仿生學(xué)的觸須傳感器在水下應(yīng)用具有重要的研究意義。觸須傳感器通過感知環(huán)境擾動信號對水下環(huán)境實現(xiàn)了監(jiān)測。本文通過對不同的水下傳感器原理及應(yīng)用進行介紹,對比了不同類型水下傳感器的各自特點。對仿生學(xué)傳感器的設(shè)計理念進行了簡述,并給出觸須傳感器的設(shè)計原理和思路,總結(jié)出觸須狀傳感器對流體激發(fā)信號的機械傳遞機制以及觸須機械結(jié)構(gòu)在傳感過程中的工作原理。最后,對基于觸須傳感器原理的水下流量傳感器及其在水下環(huán)境中的應(yīng)用現(xiàn)狀和面對的挑戰(zhàn)進行重點概述,展望了觸須傳感器在水下環(huán)境中未來的發(fā)展策略。
-
傳感器
+關(guān)注
關(guān)注
2551文章
51171瀏覽量
754242 -
機器人
+關(guān)注
關(guān)注
211文章
28467瀏覽量
207351 -
電磁感應(yīng)
+關(guān)注
關(guān)注
17文章
829瀏覽量
58072
發(fā)布評論請先 登錄
相關(guān)推薦
水下機器人便攜式遙控單元設(shè)計
瑞士水下仿生機器人-Sepios
各種炫酷的仿生機器人
【NanoPi NEO2試用申請】水下機器人探測項目
TDK-Lambda電源在系留無人機及水下機器人中的應(yīng)用
如何設(shè)計水下機器人嵌入式控制系統(tǒng)?
水下機器人制作需要實現(xiàn)哪些功能呢
采用NI MyRIO實現(xiàn)的水下機器人(Zynq
水下機器人研發(fā)挑戰(zhàn)海外市場
自由度下的水下機器人控制器抗干擾設(shè)計

水下機器人發(fā)展現(xiàn)狀,虛假繁榮還是水下機器人元年
這些水下機器人你見過嗎?一些水下機器人產(chǎn)品的介紹
仿生機器人分為哪幾類_仿生機器人研究現(xiàn)狀

水下機器人的設(shè)計與實現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論