") 雷達(dá)收發(fā)器在ADAS和自動(dòng)駕駛中的重要地位
雷達(dá)收發(fā)器在ADAS和自動(dòng)駕駛中的重要地位
在這篇專(zhuān)門(mén)討論汽車(chē)?yán)走_(dá)的博客的最后一篇文章中,我們分析了影響探測(cè)范圍的 MMIC 雷達(dá)收發(fā)器的參數(shù)。在這里,我們將解釋如何提高檢測(cè)精度,重點(diǎn)關(guān)注視場(chǎng)以及范圍和角度分辨率。確實(shí),僅僅“看”得越遠(yuǎn)越好。能夠區(qū)分距離或角度(方位)接近的兩個(gè)目標(biāo)也很重要。
圖像
1.1 距離分辨率
雷達(dá)的距離分辨率定義為區(qū)分放置在相同角方向(方位)但距雷達(dá)不同距離的不同目標(biāo)的能力。兩個(gè)目標(biāo)反射的信號(hào)在時(shí)域中發(fā)生偏移。
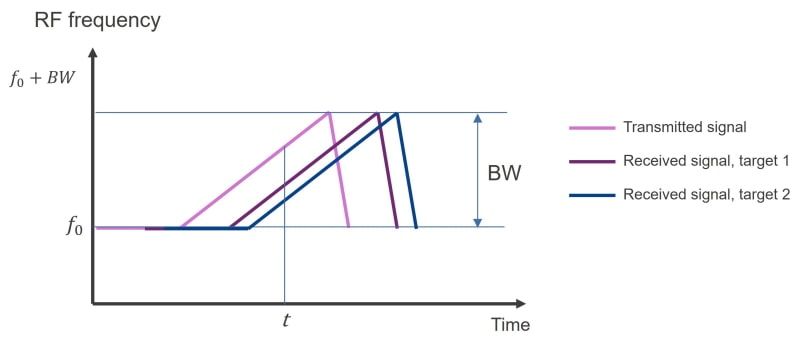
圖 1 發(fā)射和接收的雷達(dá)信號(hào)(2 個(gè)目標(biāo))。
在執(zhí)行 FFT(快速傅立葉變換)之后,獲得了對(duì)應(yīng)于每個(gè)目標(biāo)的兩個(gè)單獨(dú)的基帶頻率(頻移)。
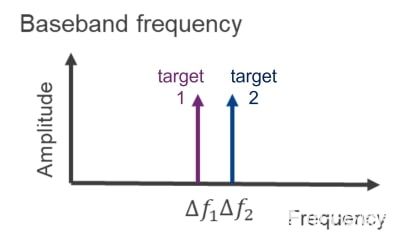
圖 2 兩個(gè)檢測(cè)到的目標(biāo)的頻移(基帶頻率)。
兩個(gè)目標(biāo)越接近,基帶頻率Δ f 1和Δ f 2之間的差異越小。在某個(gè)時(shí)刻,雷達(dá)系統(tǒng)將無(wú)法再將它們分開(kāi)。該最小頻移/距離對(duì)應(yīng)于一個(gè) FFT bin。在觀察時(shí)間T c內(nèi)可以解析的最小頻率差 Δ f為:

(1)
Δ f可以通過(guò)增加觀察時(shí)間來(lái)改善(即最小化)。
目標(biāo)之間的距離 Δ R與 Δ f直接相關(guān):
(2)
其中 c 為光速。
其中S是發(fā)射雷達(dá)信號(hào)的斜率(以 Hz/s 為單位的啁啾率)。由于帶寬是信號(hào)斜率及其持續(xù)時(shí)間的乘積,因此距離分辨率 d res可以寫(xiě)成信號(hào)帶寬的函數(shù):
(3)
因此,雷達(dá)芯片的帶寬將對(duì)可實(shí)現(xiàn)的距離分辨率產(chǎn)生直接影響:
表 1 距離分辨率與雷達(dá)信號(hào)帶寬。
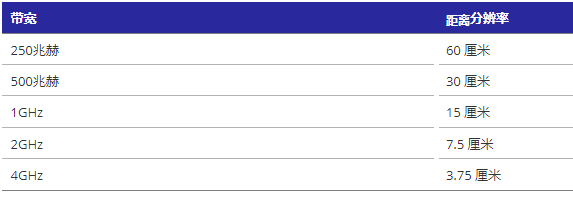
對(duì)于需要高分辨率的應(yīng)用,例如成像雷達(dá),將需要大帶寬。然而,遠(yuǎn)程雷達(dá)等其他應(yīng)用不需要厘米數(shù)量級(jí)的精度,因此較小的帶寬就足夠了。考慮這一點(diǎn)很重要,因?yàn)樽畲罄走_(dá)范圍與帶寬成反比:
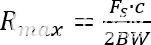
(4)
對(duì)于給定的采樣率F s,增加帶寬將減小檢測(cè)范圍。
1.2 視野
以明確的方式確定目標(biāo)(方位)的方向也很重要。這只能在雷達(dá)的視場(chǎng) (FOV) 內(nèi)實(shí)現(xiàn),它定義了雷達(dá)在方位角(水平面)和仰角(垂直面)的角度覆蓋范圍。
圖像圖像汽車(chē)?yán)走_(dá)使用多個(gè)接收天線來(lái)確定反射信號(hào)的到達(dá)角 (AoA),從而確定障礙物的角位置。因此,天線陣列的幾何形狀將成為視場(chǎng)的限制因素。
如果考慮單個(gè)發(fā)射天線,F(xiàn)OV 將由接收天線的幾何形狀和輻射特性決定。讓我們考慮兩個(gè)接收天線相隔距離 d 的情況。
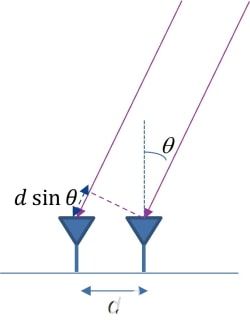
圖 5 用于確定 AoA 的接收天線。
可以通過(guò)比較每個(gè)天線接收到的信號(hào)的相移來(lái)計(jì)算信號(hào)的到達(dá)角。接收信號(hào)的相移取決于頻率(波長(zhǎng))和天線之間的距離,如圖 6 所示:

(5)
到達(dá)角的明確測(cè)量的角度范圍是相位差從 -180° 到 +180° 單調(diào)變化的范圍,因此從純幾何的角度來(lái)看,理論 FOV 由下式給出:
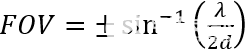
(6)
當(dāng)可以檢測(cè)到從 -90° 到 +90° 的所有到達(dá)角時(shí),可實(shí)現(xiàn)最大視野。這是當(dāng)天線之間的距離等于工作頻率波長(zhǎng)的一半時(shí)的情況,即:

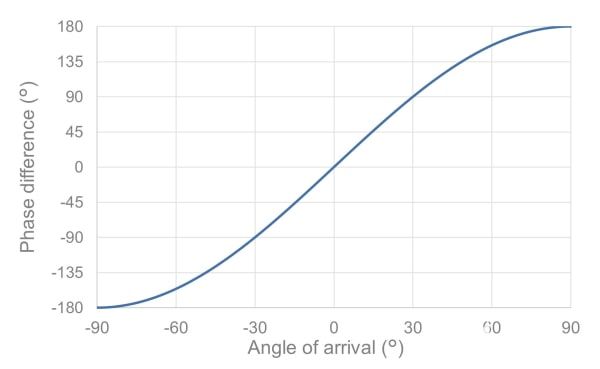
圖 6 兩個(gè)接收天線的相位差,d = λ/2。
對(duì)于 77GHz 的汽車(chē)?yán)走_(dá),理論 FOV 可以通過(guò)使用大約 2mm 的天線之間的間隔來(lái)最大化。這是假設(shè)使用的天線是各向同性的輻射器。在現(xiàn)實(shí)生活中,視場(chǎng)將進(jìn)一步受到天線輻射模式的限制。
現(xiàn)在讓我們考慮一下,接收天線是兩個(gè)均勻的線性貼片陣列,如圖 8 所示。
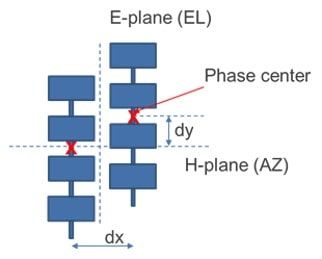
圖 7 線性貼片陣列作為接收天線,用于確定方位角和仰角的 AoA。
在這種情況下,方位角上的天線方向圖很寬(相當(dāng)于貼片天線),因此它對(duì)FOV的影響是有限的。主要的限制效應(yīng)是行之間的間距 dx,F(xiàn)OV 可以使用 eq. (6)。
對(duì)于仰角 FOV,垂直行中的所有貼片都被視為單個(gè)天線。為了計(jì)算理論 FOV,我們需要考慮行的相位中心(即行的總輻射起源的假想點(diǎn))。仰角的理論 FOV 將受到每個(gè)垂直行 (dy) 的相位中心之間的垂直間距的限制。如果這種分離是半個(gè)波長(zhǎng),我們?cè)瓌t上可以獲得最大 FOV。然而,在這種情況下,天線的半功率波束寬度 (HPBW) 要小得多(~20-25°),因此無(wú)法在天線波束之外進(jìn)行檢測(cè)。在這種情況下,輻射方向圖將成為 FOV 的限制因素。
1.3 角度分辨率
與距離分辨率的情況一樣,能夠區(qū)分以不同角度(方位)放置但距離相同的兩個(gè)單獨(dú)目標(biāo)也很重要。這里,由于信號(hào)延遲引起的頻移不能用于識(shí)別來(lái)自每個(gè)目標(biāo)的信號(hào)。同樣,需要特殊的分集,在不同的位置有多個(gè)天線。
角分辨率θ res表示雷達(dá)可以分辨的最小角間距。對(duì)于單個(gè)發(fā)射天線,它可以計(jì)算為:
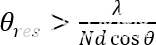
(7)
N是接收天線的數(shù)量,θ是到達(dá)角。對(duì)于接近視軸方向 ( θ = 0°) 的軸承,角分辨率最大:

(8)
如果我們考慮天線是分開(kāi)的
,為了最大化FOV,角分辨率將與頻率無(wú)關(guān),僅由接收天線的數(shù)量決定。

(9)
因此,可以通過(guò)增加天線數(shù)量來(lái)提高分辨率。這只能通過(guò)向雷達(dá) MMIC 收發(fā)器添加更多通道來(lái)實(shí)現(xiàn)。通過(guò)使用多根發(fā)射天線進(jìn)行 MIMO(多輸入多輸出)和超分辨率后處理,可以進(jìn)一步提高分辨率。
1.4 結(jié)論
在本條目中,介紹了確定雷達(dá)系統(tǒng)精度的參數(shù)。距離分辨率與雷達(dá)收發(fā)器的性能直接相關(guān),而角分辨率和視場(chǎng)也取決于雷達(dá)系統(tǒng)中使用的天線的幾何形狀。
審核編輯:郭婷
-
收發(fā)器
+關(guān)注
關(guān)注
10文章
3438瀏覽量
106074 -
天線
+關(guān)注
關(guān)注
68文章
3206瀏覽量
140909 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
2951瀏覽量
117685
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
從《自動(dòng)駕駛地圖數(shù)據(jù)規(guī)范》聊高精地圖在自動(dòng)駕駛中的重要性


什么是自動(dòng)駕駛場(chǎng)景仿真軟件——VTD(Virtial Test Drive)?#ADAS #智能駕駛
MEMS技術(shù)在自動(dòng)駕駛汽車(chē)中的應(yīng)用
PWM控制在自動(dòng)駕駛汽車(chē)中的重要性
汽車(chē)雷達(dá)回波發(fā)生器的技術(shù)原理和應(yīng)用場(chǎng)景
激光雷達(dá)在自動(dòng)駕駛中的應(yīng)用

自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案——攝像頭仿真之視頻注入#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案介紹#ADAS #自動(dòng)駕駛 #VTHiL
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
深度學(xué)習(xí)在自動(dòng)駕駛中的關(guān)鍵技術(shù)
標(biāo)貝數(shù)據(jù)采集標(biāo)注在自動(dòng)駕駛場(chǎng)景中落地應(yīng)用實(shí)例

未來(lái)已來(lái),多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
自動(dòng)駕駛汽車(chē)技術(shù) | 車(chē)載雷達(dá)系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論