") 用于機(jī)器人中的磁性位置傳感技術(shù)
用于機(jī)器人中的磁性位置傳感技術(shù)
自主或與人類工人一起操作的機(jī)器人設(shè)計(jì)提供了便利、效率和準(zhǔn)確性,極大地造福了制造業(yè)和工業(yè)部門。在這里,在所有條件下監(jiān)控電機(jī)位置有助于保持系統(tǒng)控制并防止可能導(dǎo)致系統(tǒng)損壞或人身傷害的意外運(yùn)動(dòng)。
為此,可以使用安裝在電機(jī)軸上的磁鐵為磁性編碼器提供輸入,從而實(shí)現(xiàn)非接觸式角度編碼。磁場(chǎng)不受污垢或污垢的影響,將此類解決方案集成到電機(jī)上可實(shí)現(xiàn)緊湊的解決方案。編碼器跟蹤旋轉(zhuǎn)磁場(chǎng)分量,這些分量是自然正弦曲線和 90 度異相。這種關(guān)系可以使用這些輸入的反正切快速計(jì)算角度位置。
多種磁編碼技術(shù)將具有相同的最終效果。當(dāng)磁鐵在電機(jī)軸上旋轉(zhuǎn)時(shí),磁阻和霍爾效應(yīng)傳感器可以檢測(cè)到不斷變化的磁場(chǎng)。3D 線性霍爾效應(yīng)傳感器等器件能夠計(jì)算角位置并提供補(bǔ)償溫度漂移、不平衡輸入幅度以及器件靈敏度和偏移的能力。
除了信號(hào)鏈誤差之外,機(jī)械公差也會(huì)影響磁體的旋轉(zhuǎn),這反過來又會(huì)決定檢測(cè)到的磁場(chǎng)的質(zhì)量。實(shí)現(xiàn)最佳性能通常需要通過多點(diǎn)線性化或諧波逼近來實(shí)施最終校準(zhǔn)過程。一旦針對(duì)機(jī)械誤差源進(jìn)行了校準(zhǔn),磁編碼就可以實(shí)現(xiàn)高精度。
驅(qū)動(dòng)電機(jī)可以直接旋轉(zhuǎn)負(fù)載,驅(qū)動(dòng)齒輪箱以增加施加的扭矩,控制齒條和小齒輪,或通過皮帶或螺桿傳動(dòng)將能量轉(zhuǎn)移到其他地方。隨著電機(jī)的軸旋轉(zhuǎn),動(dòng)能轉(zhuǎn)移到系統(tǒng)某處的機(jī)械位置變化中。無論如何,電機(jī)軸的角度與機(jī)構(gòu)運(yùn)動(dòng)部件的位置直接相關(guān)。在匝數(shù)比不是 1 比 1 的情況下,跟蹤電機(jī)轉(zhuǎn)數(shù)也變得很重要。
位置計(jì)算
觀察兩個(gè)相差 90 度的等幅正弦輸入,并使用這些信號(hào)執(zhí)行反正切計(jì)算,從而跟蹤電機(jī)的絕對(duì)角度。
下面概述的技術(shù)可以計(jì)算角位置:
- 一維霍爾效應(yīng)傳感器
- 三維霍爾效應(yīng)傳感器
- 各向異性磁阻傳感器
- 巨磁阻傳感器
- 隧道磁阻傳感器
- 電感式傳感器
- 光學(xué)編碼
- 步進(jìn)電機(jī)脈沖控制
- 無傳感器電機(jī)控制
步進(jìn)電機(jī)和無傳感器電機(jī)控制不提供絕對(duì)位置反饋,而是根據(jù)起始位置的相對(duì)變化來估計(jì)位置。當(dāng)系統(tǒng)斷電時(shí),必須通過其他方式確定電機(jī)的實(shí)際位置。
對(duì)于列出的其余技術(shù),角度編碼器使用具有 90 度相位差的正弦輸出來確定精確的角度位置。
光學(xué)編碼器往往提供最高精度的精度,但通常需要笨重的外殼來保護(hù)傳感器和光圈免受灰塵、污垢和其他污染物的影響。此外,編碼器的機(jī)械元件必須耦合到電機(jī)軸。高于編碼器機(jī)械額定值的轉(zhuǎn)速可能會(huì)導(dǎo)致無法修復(fù)的損壞并導(dǎo)致停機(jī)。
霍爾效應(yīng)傳感器和磁阻傳感器等磁感應(yīng)技術(shù)使用固定在電機(jī)軸上的磁鐵;傳感器不需要任何機(jī)械連接。與永磁體相關(guān)的磁場(chǎng)將滲透到磁體周圍的區(qū)域,這為傳感器放置提供了廣泛的自由度。旋轉(zhuǎn)磁體的磁場(chǎng)矢量分量自然有 90 度異相,這使得單片多軸磁傳感器能夠通過單個(gè)設(shè)備執(zhí)行角度編碼。緊湊的解決方案、放置自由度和非接觸式配置使磁傳感器對(duì)角度編碼應(yīng)用具有吸引力。
感應(yīng)式傳感器的工作原理與磁性解決方案類似,通過耦合感應(yīng)線圈產(chǎn)生的交流磁場(chǎng),在附近的金屬目標(biāo)中產(chǎn)生表面渦流。目標(biāo)的接近度變化導(dǎo)致系統(tǒng)有效電感的變化,當(dāng)與專用目標(biāo)一起使用時(shí),可以產(chǎn)生正弦和余弦輸出。
讓我們考慮由磁鐵在TMAG5170等 3D 霍爾效應(yīng)傳感器上方旋轉(zhuǎn)產(chǎn)生的理想輸入,如圖 1所示。
圖 1同軸磁旋轉(zhuǎn)允許霍爾效應(yīng)傳感器計(jì)算角位置。資料來源:德州儀器
使用輸入的反正切計(jì)算角度,如圖 2所示,將提供對(duì)實(shí)際電機(jī)角度的完美推論,假設(shè)沒有機(jī)械公差的理想布置。在實(shí)踐中,有幾個(gè)機(jī)械因素會(huì)影響磁場(chǎng)輸入的質(zhì)量。由此產(chǎn)生的角度誤差將成為這些因素中每一個(gè)的復(fù)雜組合,具體取決于每個(gè)機(jī)械缺陷的嚴(yán)重程度。
圖 2理想的正弦和余弦輸入為實(shí)際電機(jī)角度提供了完美的推論。資料來源:德州儀器
現(xiàn)在,讓我們看看影響性能的幾種類型的裝配錯(cuò)誤。盡管同軸對(duì)齊往往是最寬容的,但每種方法的效果都會(huì)因傳感器位置和磁體幾何形狀而異。
磁鐵傾斜
如果磁鐵沒有完全垂直于其電機(jī)軸安裝,則該磁鐵在旋轉(zhuǎn)過程中會(huì)出現(xiàn)擺動(dòng)。磁鐵的有效 XYZ 坐標(biāo)空間與傳感器的不一致對(duì)齊將導(dǎo)致角度測(cè)量非線性。

圖 3磁鐵傾斜(上)和擺動(dòng)(下)會(huì)導(dǎo)致角度測(cè)量的非線性。資料來源:德州儀器
磁鐵偏心率
在磁體旋轉(zhuǎn)過程中,磁體相對(duì)于傳感器的位置會(huì)不斷變化。由于來自磁體的磁通密度與距離的平方成反比,因此這種效應(yīng)會(huì)產(chǎn)生顯著的非線性。結(jié)果,磁體的偏心可能是由于磁體與軸的旋轉(zhuǎn)軸線的不正確對(duì)準(zhǔn)而導(dǎo)致的。
圖 4偏心磁體旋轉(zhuǎn)是由于磁體對(duì)齊不當(dāng)造成的。資料來源:德州儀器
系統(tǒng)位置偏移
放置偏移會(huì)在輸入磁場(chǎng)分量的幅度和相位中引入意想不到的變化。這些誤差同樣會(huì)影響最終的角度計(jì)算。
圖 5偏移傳感器放置可能會(huì)導(dǎo)致輸入磁場(chǎng)的幅度和相位發(fā)生意外變化。資料來源:德州儀器
電機(jī)軸傾斜
根據(jù)磁鐵的傾斜和用于計(jì)算的靈敏度軸,電機(jī)軸傾斜會(huì)導(dǎo)致輸入信號(hào)相位誤差。當(dāng)使用反正切進(jìn)行計(jì)算時(shí),這種相位誤差會(huì)產(chǎn)生非線性。在這種情況下,磁鐵不會(huì)擺動(dòng),但傳感器的正交性會(huì)丟失。

圖 6傾斜電機(jī)校準(zhǔn)會(huì)導(dǎo)致相位誤差。資料來源:德州儀器
傳感器焊接錯(cuò)位
這種情況與電機(jī)軸傾斜非常相似。在焊料回流期間,任何設(shè)備都可能在焊料凝固時(shí)無法完美對(duì)齊。這種未對(duì)準(zhǔn)可能導(dǎo)致封裝沿任何軸傾斜,這將導(dǎo)致輸入可能出現(xiàn)幅度或相位誤差。
圖 7傳感器未對(duì)準(zhǔn)會(huì)導(dǎo)致幅度或相位誤差。資料來源:德州儀器
糾正機(jī)械錯(cuò)誤
圖 8至圖 11顯示了與以原點(diǎn)為中心的理想圓相比的各種非線性誤差的簡(jiǎn)單形式。這些圖描繪了在繪制兩個(gè)輸入信號(hào)相互對(duì)比時(shí)各種錯(cuò)誤的可能影響。
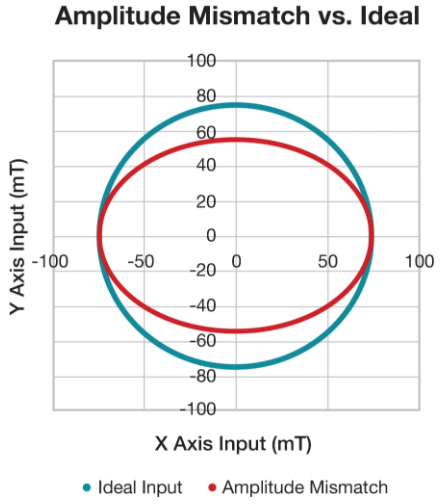
圖 8這是理想輸入(藍(lán)色)和幅度失配(紅色)之間的比較。資料來源:德州儀器
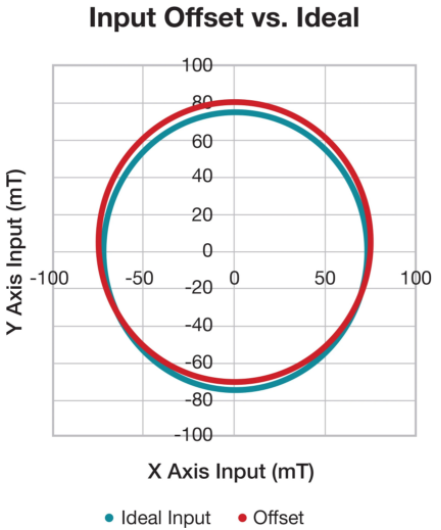
圖 9顯示了偏移和理想輸入之間的比較。資料來源:德州儀器
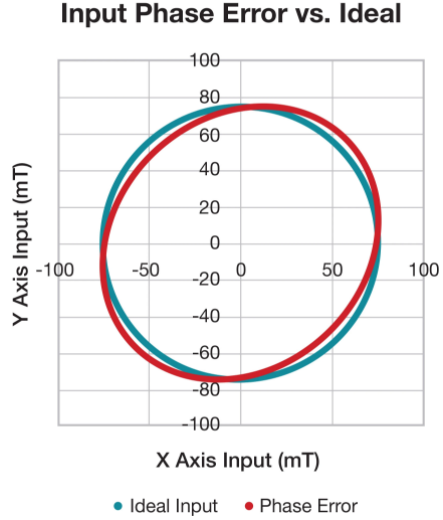
圖 10顯示了理想輸入和相位誤差之間的比較。資料來源:德州儀器
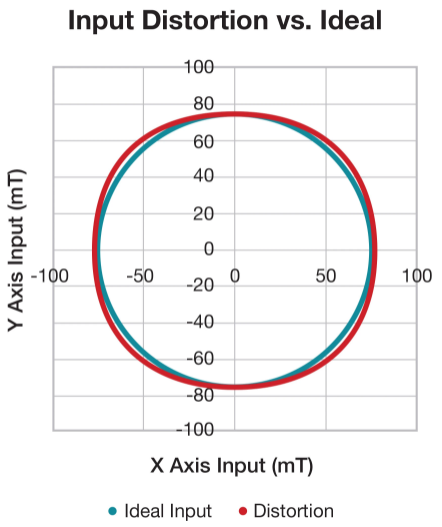
圖 11顯示了失真和理想輸入之間的比較。
在方程式 1 中,θ' 表示計(jì)算的角度。理想 90 度的相位誤差顯示為 σ。A(θ) 和 B(θ) 在理想情況下是等效函數(shù),但也可以描述簡(jiǎn)單的標(biāo)量幅度失配或由磁體旋轉(zhuǎn)缺陷引起的幅度的周期性變化。變化幅度會(huì)導(dǎo)致失真,從而對(duì)角度線性度產(chǎn)生不利影響。
θ' = atan (A(θ) sin (θ+σ) + 偏移量sin )/(B(θ) cos (θ) + 偏移量cos ) (1)
取 θ 和 θ' 之間的差值來計(jì)算總是周期性重復(fù)的絕對(duì)角度誤差。圖 12中顯示的誤差是由未放置在軸上的傳感器捕獲的不匹配輸入幅度產(chǎn)生的未校正誤差的示例。
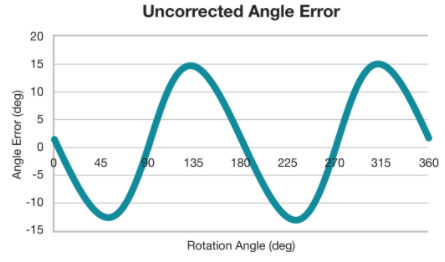
圖 12這是由非理想磁輸入引起的角度誤差示例。資料來源:德州儀器
如果將傳感器放置在軸上對(duì)齊,則任何幅度失配都將最小化,并且校正前的誤差將具有較小的峰值。
幅度失配是由于傳感器放置在磁場(chǎng)內(nèi)造成的,但也可能受到傳感器靈敏度增益誤差的影響。調(diào)整通道靈敏度或在后處理中應(yīng)用標(biāo)量是標(biāo)準(zhǔn)化輸入幅度的兩種方法。
觀察到的磁場(chǎng)中的信號(hào)鏈偏移或偏移也需要校正受影響的輸入信號(hào)。執(zhí)行這兩種校正將立即提高整體準(zhǔn)確性。
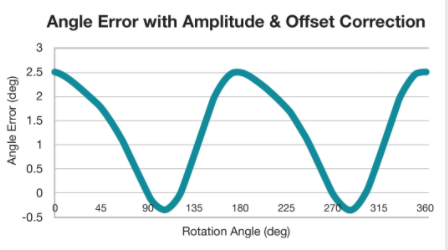
圖 13剩余角度誤差可能由機(jī)械源引起。資料來源:德州儀器
在解決幅度和偏移誤差之后,剩余部分可歸因于相位誤差和失真。通常由機(jī)械未對(duì)準(zhǔn)引起,此類誤差在系統(tǒng)之間往往是獨(dú)一無二的,并且更難以直接糾正。
校準(zhǔn)方法
實(shí)施終端校準(zhǔn)有兩種常見的過程:多點(diǎn)線性化或諧波逼近。這兩個(gè)過程都需要根據(jù)已知參考捕獲多個(gè)數(shù)據(jù)點(diǎn),以有效計(jì)算循環(huán)誤差。
多點(diǎn)線性化假設(shè)每個(gè)收集的數(shù)據(jù)點(diǎn)之間存在線性變化。增加樣本數(shù)量會(huì)降低這種近似的不確定性。考慮用四個(gè)、八個(gè)、16 或 32 個(gè)線性化點(diǎn)來校正圖 13中所示的剩余誤差。當(dāng)應(yīng)用于圖 13 中所示的誤差時(shí),使用 32 個(gè)點(diǎn)的這種方法的殘差在所有位置都遠(yuǎn)低于 0.1 度。
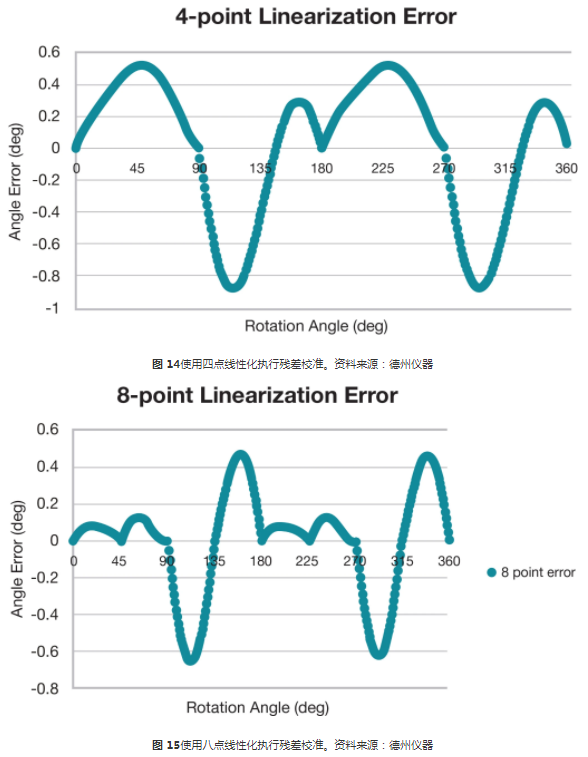
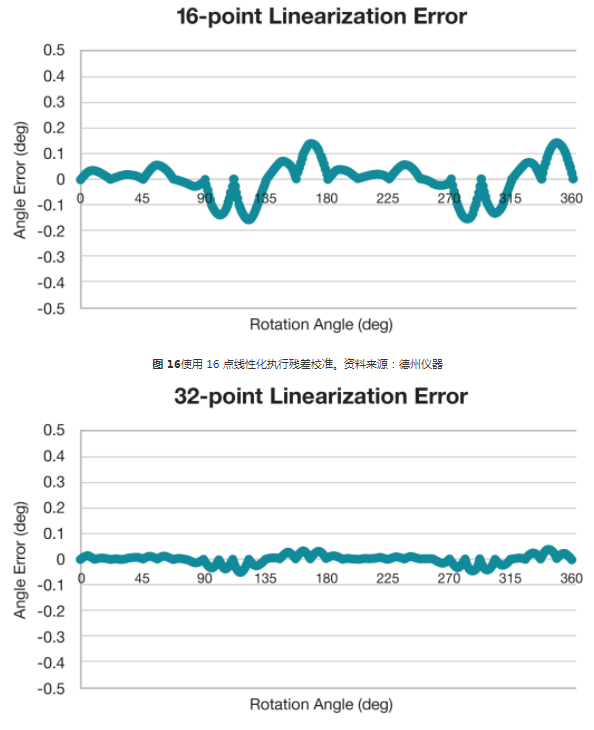
圖 17使用 32 點(diǎn)線性化執(zhí)行殘差校準(zhǔn)。資料來源:德州儀器
另一方面,諧波近似是一種先進(jìn)的方法,可以識(shí)別誤差的循環(huán)重復(fù)性質(zhì)。等式 2 將總誤差描述為諧波的無限組合之和:
θ 校正 = ∑ n i=1 α i cos (i * θ) + β i sin (i * θ) (2)
增加用于校準(zhǔn)的數(shù)據(jù)點(diǎn)數(shù)量可以更準(zhǔn)確地確定每個(gè)諧波的標(biāo)量 α 和 β,從而產(chǎn)生比多點(diǎn)線性化更高的精度。
因此,不是使用分段線性化,而是通過僅減去前四個(gè)諧波來校正圖 13 中的誤差會(huì)導(dǎo)致所有位置的誤差小于 0.01 度。
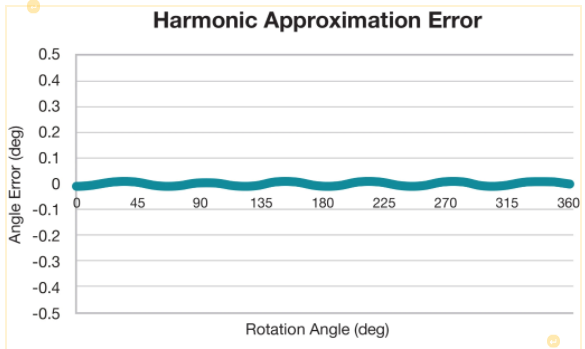
圖 18這是使用諧波近似完成的誤差校準(zhǔn)的總體視圖。資料來源:德州儀器
機(jī)器人中的磁感應(yīng)
磁性角度傳感是用于精密機(jī)器人應(yīng)用的有益技術(shù)。雖然磁場(chǎng)滲透空間,但它提供了一種簡(jiǎn)單的方法來向微處理器提供角度信息,而無需直接機(jī)械連接到電機(jī)軸,從而減少可能導(dǎo)致系統(tǒng)故障的機(jī)制。
任何磁感應(yīng)解決方案的挑戰(zhàn)是可能的對(duì)齊因素和導(dǎo)致周期性角度誤差的信號(hào)鏈誤差的數(shù)量。仔細(xì)的設(shè)計(jì)可以限制這些錯(cuò)誤的嚴(yán)重性,但總會(huì)存在一些系統(tǒng)容差。未經(jīng)校準(zhǔn)的所有這些來源的組合可能會(huì)導(dǎo)致不可接受的精度。多點(diǎn)線性化或諧波逼近提供了一種直接有效的方法來計(jì)算最高精度的電機(jī)位置。
德州儀器 (TI) 位置傳感產(chǎn)品系統(tǒng)工程師 Scott Bryson 為 Planet Analog 撰寫了 Signal Chain Basics 博客 # 175。
-
傳感器
+關(guān)注
關(guān)注
2552文章
51228瀏覽量
754671 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28512瀏覽量
207507
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
MPS磁性位置傳感器MA600在機(jī)器人中的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論