 如何在NVIDIA Jetson平臺創建多攝像頭管道
如何在NVIDIA Jetson平臺創建多攝像頭管道
多攝像頭應用越來越流行;它們對于實現自主機器人、智能視頻分析( IVA )和 AR / VR 應用至關重要。無論具體的用例如何,都必須始終執行一些常見任務:
俘虜
預處理
編碼
陳列
在許多情況下,您還希望在攝像頭流上部署 DNN ,并在檢測上運行自定義邏輯。圖 1 顯示了應用程序的一般流程。
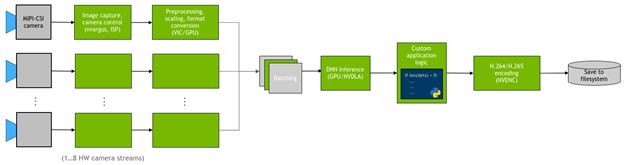
圖 1 本項目實施的管道流程
在本文中,我將展示如何在 NVIDIA Jetson 平臺上高效地實現這些常見任務。具體來說,我介紹了 jetmulticam ,一個易于使用的 Python 軟件包,用于創建多攝像頭管道。我在一個帶有環繞攝像頭系統的機器人上演示了一個特定的用例。
多攝像頭硬件
選擇相機時要考慮的參數有很多:分辨率、幀速率、光學、全局/滾動快門、界面、像素大小等。
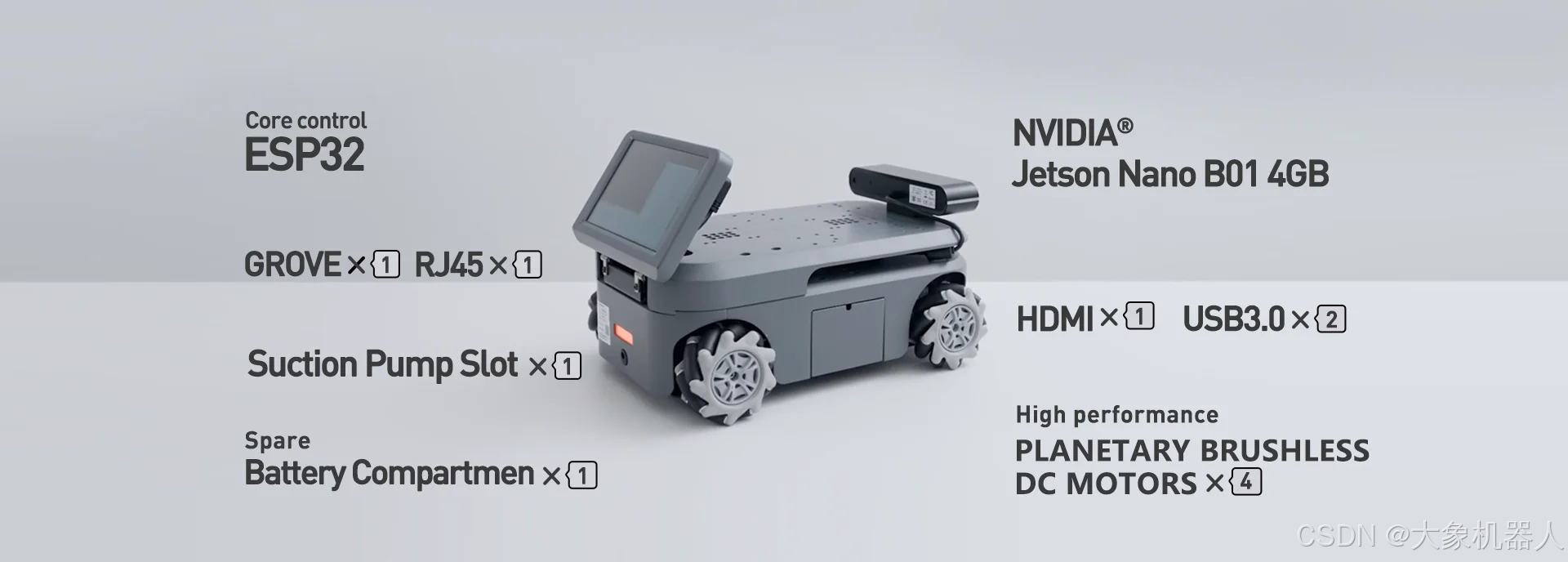
在這個特定的多攝像頭設置中,可以使用以下硬件:
NVIDIA Jetson Xavier NX 單元
Leopard Imaging 提供的支持 GMSL2 的 carrier board
Leopard Imaging 的 3 × IMX185 GMSL2 cameras
IMX185 攝像頭的視野約為 90 °。如圖 2 所示,以 270 °的總視場相互垂直安裝。
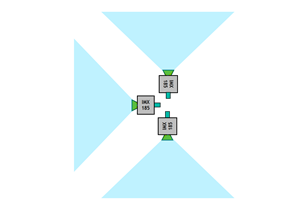
圖 2 安裝攝像頭是為了最大限度地提高水平視野
攝像頭使用 GMSL 接口,該接口在距離 Jetson 模塊幾米遠的位置提供了很大的靈活性。在這種情況下,可以將攝像頭升高約 0.5 米,以獲得更大的垂直視野。
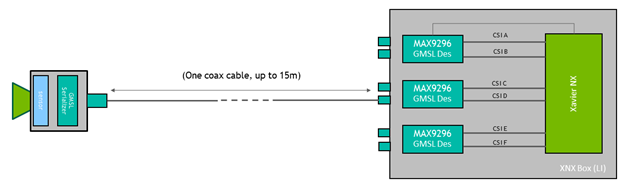
圖 3 GMSL 接口可以靈活地將攝像頭定位在遠離 Jetson 模塊的位置
開始使用 Jetmulticam
首先,在 Jetson 板上下載并安裝 NVIDIA Jetpack SDK 。然后,安裝jetmulticam軟件包:
$ git clone https://github.com/NVIDIA-AI-IOT/jetson-multicamera-pipelines.git $ cd jetson-multicamera-pipelines $ bash scripts/install_dependencies.sh $ pip3 install Cython $ pip3 install .
基本多攝像機流水線
安裝完成后,可以使用CameraPipeline類創建基本管道。通過 initializer 參數傳遞要包含在管道中的攝影機列表。在下面的示例中,元素[0, 1, 2]對應于設備節點/dev/video0、/dev/video1和/dev/video2。
from jetmulticam import CameraPipeline p = CameraPipeline([0, 1, 2])
就這樣,管道已經初始化并啟動。現在,您可以從管道中的每個攝像頭讀取圖像,并以numpy陣列的形式訪問它們。
img0 = p.read(0) # img0 is a np.array img1 = p.read(1) img2 = p.read(2)
通常,在一個循環中讀取相機是很方便的,如下面的代碼示例所示。管道從主線程異步運行,read始終獲取最新的緩沖區。
while True: img0 = p.read(0) print(img0.shape) # >> (1920, 1080, 3) time.sleep(1/10)
更復雜的人工智能管道
現在,您可以構建更復雜的管道。這一次,使用CameraPipelineDNN類組成更復雜的管道,以及NGC目錄PeopleNet和DashCamNet中的兩個預訓練模型。
import time from jetmulticam import CameraPipelineDNN from jetmulticam.models import PeopleNet, DashCamNet if __name__ == "__main__": pipeline = CameraPipelineDNN( cameras=[2, 5, 8], models=[ PeopleNet.DLA1, DashCamNet.DLA0, # PeopleNet.GPU ], save_video=True, save_video_folder="/home/nx/logs/videos", display=True, ) while pipeline.running(): arr = pipeline.images[0] # np.array with shape (1080, 1920, 3) dets = pipeline.detections[0] # Detections from the DNNs time.sleep(1/30)
下面是管道初始化的分解:
- 攝像機
- 模型
- 硬件加速
- 保存視頻
- 顯示視頻
- 主回路
攝像機
首先,與前面的示例類似,cameras參數是傳感器列表。在這種情況下,使用與設備節點關聯的攝像頭:
-
/dev/video2 -
/dev/video5 -
/dev/video8
cameras=[2, 5, 8]
模型
第二個參數 models 使您能夠定義要在管道中運行的預訓練模型。
models=[ PeopleNet.DLA1, DashCamNet.DLA0, # PeopleNet.GPU ],
在這里,您將從NGC部署兩個經過預訓練的模型:
- PeopleNet:一種能夠識別人、臉和包的物體檢測模型。
- DashCamNet:能夠識別四類對象的模型:汽車、人、路標和自行車。
有關更多信息,請參閱 NGC 中的model cards。
硬件加速
模型使用NVIDIA 深度學習加速器( DLA )實時運行。具體來說,可以在 DLA0 ( DLA Core 0 )上部署 PeopleNet ,在 DLA1 上部署 DashCamNet 。
在兩個加速器之間分配模型有助于提高管道的總吞吐量。此外, DLA 甚至比 GPU 更節能。因此,在最高時鐘設置的滿載情況下,系統消耗的電量僅為~ 10W 。最后,在這種配置中, Jetson GPU 仍然可以使用 Jetson NX 上的 384 CUDA 內核自由加速更多任務。
下面的代碼示例顯示了當前支持的模型/加速器組合的列表。
pipeline = CameraPipelineDNN( # ... models=[ models.PeopleNet.DLA0, models.PeopleNet.DLA1, models.PeopleNet.GPU, models.DashCamNet.DLA0, models.DashCamNet.DLA1, models.DashCamNet.GPU ] # ... )
保存視頻
接下來的兩個參數指定是否存儲編碼的視頻,并定義用于存儲的文件夾。
save_video=True,
save_video_folder="/home/nx/logs/videos",
顯示視頻
作為最后的初始化步驟,將管道配置為在屏幕上顯示視頻輸出,以便進行調試。
display=True
主回路
最后,定義主循環。在運行期間,圖像在pipeline.images下可用,檢測結果在pipeline.detections下可用。
while pipeline.running():
arr = pipeline.images[0] # np.array with shape (1080, 1920, 3)
dets = pipeline.detections[0] # Detections from the DNNs
time.sleep(1/30)
下面的代碼示例顯示了結果檢測。對于每次檢測,您都會得到一個包含以下內容的字典:
- 對象類
- 以像素坐標定義為[左、寬、頂、高]的對象位置
- 檢測置信度
>>> pipeline.detections[0] [ # ... { "class": "person", "position": [1092.72 93.68 248.01 106.38], # L-W-T-H "confidence": 0.91 }, #... ]
用自定義邏輯擴展人工智能管道
作為最后一步,您可以使用 DNN 輸出擴展主循環以構建自定義邏輯。具體來說,您可以使用攝像頭的檢測輸出在機器人中實現基本的人員跟隨邏輯。源代碼可在 NVIDIA-AI-IOT/jetson-multicamera-pipelines GitHub repo 中找到。
要找到要跟蹤的人,請解析管道。檢測輸出。此邏輯在 find_closest_human 函數中實現。
根據 dets2steer 中邊界框的位置計算機器人的轉向角。
如果人在左圖中,最大限度地左轉。
如果人在正確的形象中,盡量向右轉。
如果人在中心圖像中,則按邊界框中心的 X 坐標成比例旋轉。
生成的視頻將保存到/home/nx/logs/videos,正如您在初始化過程中定義的那樣。
解決方案概述
下面簡要介紹一下在下面的示例中配置jetmulticam works. The package dynamically creates and launches a GStreamer pipeline with the number of cameras that your application requires. Figure 4 shows how the underlying GStreamer管道時的外觀。如您所見,系統中所有關鍵操作(由綠色方框表示)都受益于硬件加速。
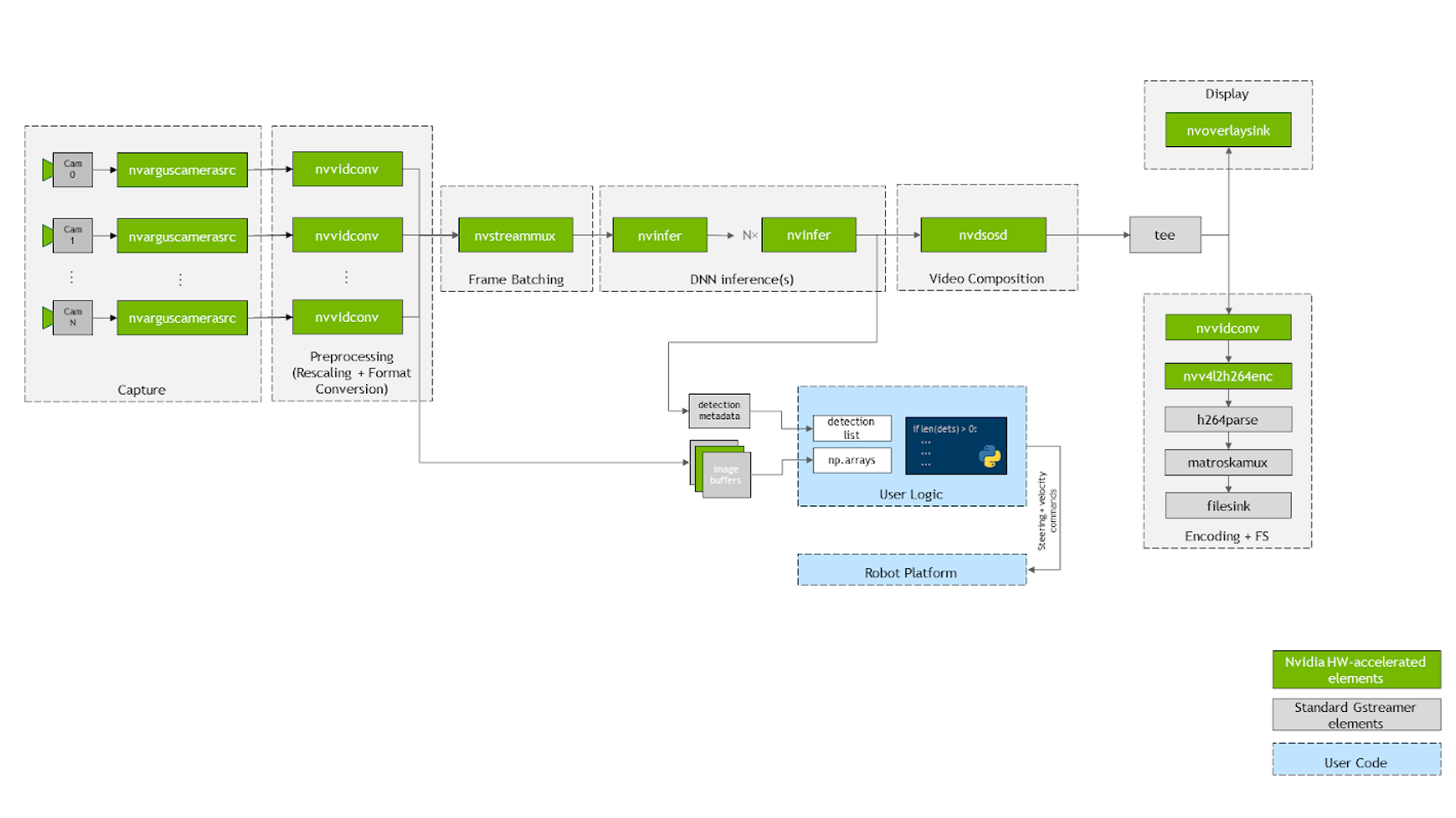
圖 4 系統的內部組件 jetmulticam package
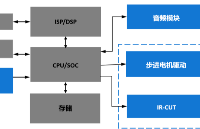
首先,使用多個攝像頭nvarguscamerasrc在視頻圖上捕獲。使用nvvidconv或nvvideoconvert重新縮放每個緩沖區并將其轉換為 RGBA 格式。接下來,使用服務器提供的component對幀進行批處理 DeepStream SDK 。默認情況下,批次大小等于系統中的攝像頭數量。
要部署 DNN 模型,請利用 nvinfer 元素。在演示中,我在 Jetson Xavier NX 上提供的兩種不同加速器 DLA core 1 和 DLA core 2 上部署了兩種型號, PeopleNet 和 DashCamNet 。然而,如果需要的話,可以將更多的模型堆疊在彼此之上。
生成的邊界框被nvosd元素覆蓋后,使用nvoverlaysink將其顯示在 HDMI 顯示屏上,并使用硬件加速的 H264 編碼器對視頻流進行編碼。保存到。 mkv 文件。
Python 代碼中可用的圖像(例如pipeline.images[0])通過回調函數或 probe 解析為numpy數組,并在每個視頻轉換器元素上注冊。類似地,在最后一個nvinfer元素的 sinkpad 上注冊了另一個回調函數,該元素將元數據解析為用戶友好的檢測列表。有關源代碼或單個組件配置的更多信息,請參閱 create_pipeline 函數。
結論
NVIDIA Jetson 平臺上的硬件加速與 NVIDIA SDKS 結合,可以實現卓越的實時性能。例如,下面的示例在三個攝像頭流上實時運行兩個對象檢測神經網絡,同時保持 CPU 利用率 低于 20% 。
本文展示的Jetmulticam包使您能夠用 Python 構建自己的硬件加速管道,并在檢測之上包含自定義邏輯。
關于作者
Tomasz Lewicki 是 NVIDIA 的嵌入式工程實習生。他擁有圣何塞州立大學計算機工程碩士學位,華沙工業大學華沙工業大學機器人工程學學士學位。他的興趣集中在計算機視覺和機器人應用的深度學習上。
審核編輯:郭婷
-
NVIDIA
+關注
關注
14文章
5026瀏覽量
103273 -
攝像頭
+關注
關注
60文章
4851瀏覽量
95930
發布評論請先 登錄
相關推薦

多光譜火焰檢測攝像頭

攝像頭及紅外成像的基本工作原理



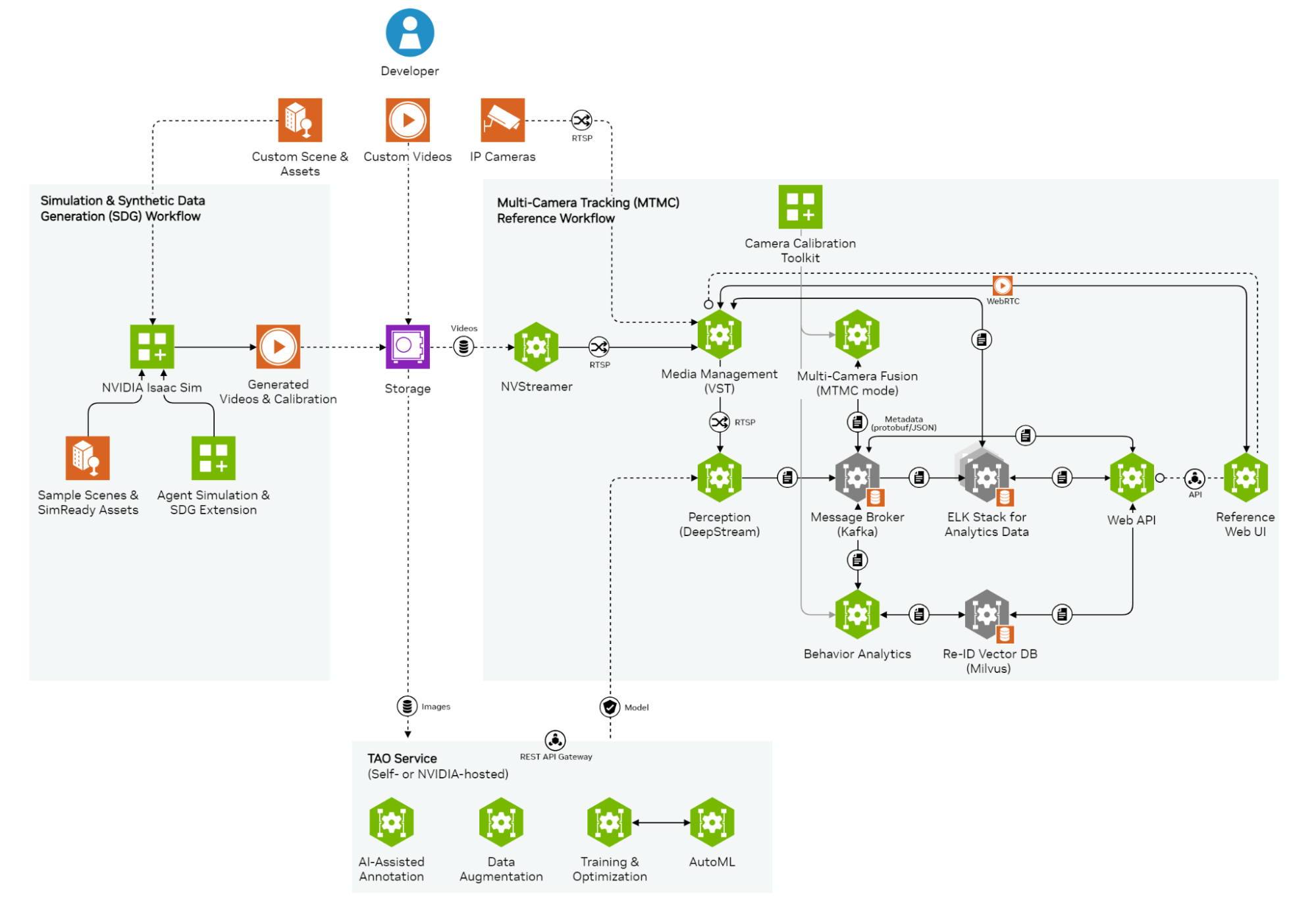
NVIDIA多攝像頭追蹤工作流的應用架構
使用myAGV、Jetson Nano主板和3D攝像頭,實現了RTAB-Map的三維建圖功能!

Epson推出多攝像頭接口芯片S2D13P04
智能攝像頭抄表器是什么?

探討車載攝像頭ESD問題的成因及解決策略
高清網絡攝像頭多媒體智能屏






 工商網監
工商網監
評論