 關于自動駕駛汽車決策系統
關于自動駕駛汽車決策系統
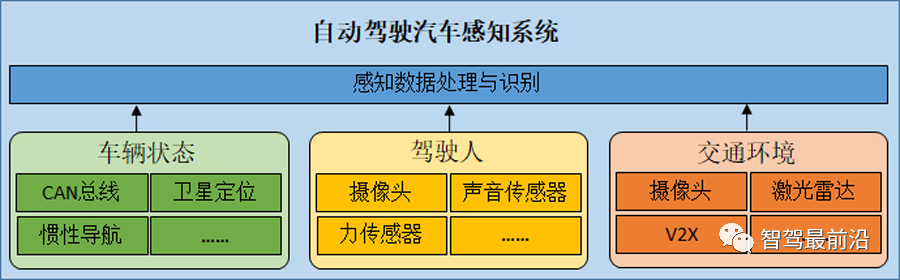
自動駕駛汽車是集感知、決策和控制等功能于一體的自主交通工具,其中,感知系統代替人類駕駛人的視、聽、觸等功能,融合攝像機、雷達等傳感器采集的海量交通環境數據,精確識別各類交通元素,為自動駕駛汽車決策系統提供支撐。
攝像機
自動駕駛汽車采用的視覺傳感器主要是工業攝像機,具有較高的圖像分辨率、傳輸能力和抗干擾能力,可分為單目、雙目和三目攝像機等三類。
1、單目攝像機
單目攝像機是僅利用一套光學系統及固體成像器件連續輸出圖像的攝像機。結構和標定簡單,可有效避免立體視覺中視場小、立體匹配困難等缺點,但在測量范圍和測量距離方面有不可調和的矛盾,即攝像機視角越寬,精準探測距離越短;攝像機視角越窄,精準探測距離越長。
2、雙目攝像機
雙目攝像機建立在人類視覺研究基礎上,不對外主動投射光源,僅依靠拍攝的2張圖片獲得場景深度信息實現三維場景重構。雙目攝像機對硬件要求相對較低,但對環境亮度極其敏感且計算復雜度較高。
3、三目攝像機
三目攝像機通過不同焦距的攝像頭實現不同范圍場景全覆蓋,即由寬視野攝像頭完成近景感知任務、主視野攝像頭完成中等距離場景感知任務、窄視野攝像頭完成遠景感知任務,既解決了單個攝像頭無法頻繁變焦的問題,同時也解決了不同距離下識別清晰度的問題。但由于多路圖像數據處理比單路圖像數據處理的難度更大,三目攝像機對芯片處理能力和硬件可靠性要求更高。
雷達
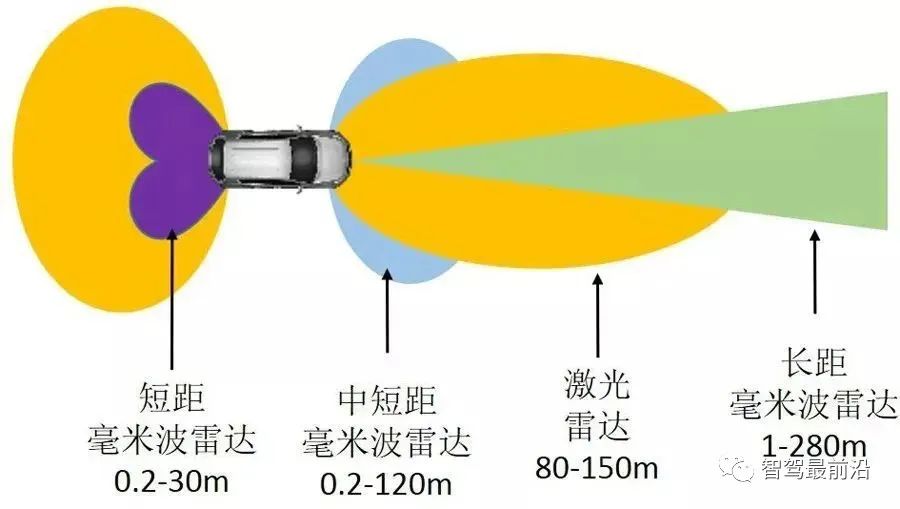
雷達能夠主動探測周邊環境,比視覺傳感器受外界環境影響更小,是自動駕駛汽車的重要傳感器之一。雷達通過向目標發射電磁波并接收回波,從而獲取目標距離、方位、距離變化率等數據。根據電磁波波段,雷達可細分為激光雷達、毫米波雷達和超聲波雷達等3類。
1、激光雷達
激光雷達由激光探測、激光測距兩部分組成,通過實時接收反饋保持對外界的敏銳感知力,具有分辨率高、抗有源干擾能力強、定向性好、測量距離遠、測量時間短等優點。激光雷達可分為單線激光雷達和多線激光雷達。單線激光雷達通過單條掃描線旋轉掃描,從而獲取物體二維信息;多線激光雷達通過多條掃描線旋轉掃描,從而獲取物體三維空間的深度信息,能夠測量物體基本特征和局部細節,測量精度高、可靠性強。
2、毫米波雷達
毫米波雷達指工作在30~300GHz頻域的雷達,具有體積小、質量輕和空間分辨率高等優點,具有全天候、全天時等優秀特性,能夠同時識別多個小目標,可以穿透霧、煙、灰塵等環境,精準測量目標的相對距離和相對速度,被廣泛應用于自動駕駛汽車車間距離探測,但易受干擾。
3、超聲波雷達
超聲波雷達工作頻率在20KHz以上,多用于精準測距,基本原理是通過測量超聲波發射脈沖和接收脈沖的時間差,結合空氣中超聲波傳輸速度計算相對距離。常見的超聲波雷達:安裝于汽車前后保險杠上,用于測量汽車前后障礙物;安裝于汽車側面,用于測量側方障礙物距離。
高精度定位
由于自動駕駛汽車無法像人類駕駛人一樣能夠準確感知障礙物、可行駛區域和交通標志標線等交通環境信息,因此需要全球衛星導航系統、慣性導航系統、高精地圖等將自動駕駛汽車與周邊交通環境有機結合,實現超視距感知,降低車載感知傳感器計算壓力。
1、全球衛星導航系統
車輛位置信息是自動駕駛汽車正常工作的前提條件,是自動駕駛系統保證安全行駛的參考基準。目前,車輛定位較多使用GPS、北斗、GLONASS和GALILEO等四大全球衛星導航系統。全球衛星導航系統能夠給出較精確的定位信息,但當數據更新頻率低、載體高速運動或受遮擋時,易丟失定位信號,導致誤差增大甚至無法定位。
2、慣性導航系統
慣性導航系統是一種不易受到外部環境干擾的自主式導航系統,通過測量自動駕駛汽車的加速度和角速率,經分析處理即可獲得自動駕駛汽車的速度、位置、姿態和航向等信息。慣性導航系統可以在衛星導航系統信號中斷時提供連續定位輸出,但具有誤差累積效應,定位精度會隨定位過程的進行而不斷降低。
3、高精地圖
通過融合激光雷達、慣性導航系統、車輪測距器等傳感數據而形成的高精地圖能夠為自動駕駛汽車提供車道級導航服務,提供包括交通標志標線、防護設施、道路曲率、航向、坡度和橫坡角等信息。結合自動駕駛汽車自身傳感數據,可以有效實現宏觀道路匹配、微觀精確定位和全局環境感知,為自動駕駛汽車安全運行提供超視距輔助。
車聯網
車聯網通過車內、車與人、車與車、車與路、車與服務平臺的全方位網絡連接,從而提升車輛智能化水平和自動駕駛能力,構建汽車和交通服務新業態,為用戶提供智能、安全、高效的綜合服務。目前,車聯網有兩種技術解決方案,包括IEEE主導的DSRC技術解決方案和3GPP主導的LTE-V技術解決方案。
1、DSRC技術
DSRC(DedicatedShort Range Communications,專用短程通信技術)是高效的無線通信技術,由車載單元(OBU,On Board Unit)、路側單元(RSU,Road Side Unit)和控制中心等組成,可以實現對特定范圍內高速移動車輛的識別和實時數據傳輸。DSRC優勢在于技術成熟,能夠保證低延時和安全可靠性,能夠滿足自動駕駛汽車對網聯通信系統穩定性和實時性的要求,但也存在覆蓋范圍小、傳輸速率低、易受建筑物遮擋、處理數據較慢、建設成本較高等不足。
2、LTE-V技術
LTE-V基于現有蜂窩移動通信支持(3G/4G),按照通信方式分為集中式(LTE-V-Cell)和分布式(LTE-V-Direct)兩種。LTE-V-Cell以基站為分布中心,需要現有蜂窩網絡支持,具有帶寬大、覆蓋廣等通信特點,能夠實現遠距離通信;LTE-V-Direct獨立于蜂窩網絡,支持車輛與周邊環境節點(含其它車輛)直接通信,具有低時延、高可靠的優勢。
LTE-V起步較晚,目前仍處于研發測試階段,但已形成可運營的完整網絡體系,能夠在高頻段(5.9GHz)、高車速(250km/h)、大車流量等環境下提供可靠的通信能力,且在大容量、低時延、抗干擾和可管理等方面更為成熟。部署成本較低,可重復利用既有蜂窩網絡的基礎設施;覆蓋范圍廣,可擴展至數百米以上的非視距范圍。
審核編輯 :李倩
-
導航系統
+關注
關注
2文章
267瀏覽量
30753 -
車聯網
+關注
關注
76文章
2598瀏覽量
91703 -
自動駕駛
+關注
關注
784文章
13904瀏覽量
166740
原文標題:一文了自動駕駛汽車決策系統
文章出處:【微信號:Zidonjiashi,微信公眾號:Zidonjiashi】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
吉利汽車自動駕駛脫困專利獲授權
一文聊聊自動駕駛測試技術的挑戰與創新

MEMS技術在自動駕駛汽車中的應用








 工商網監
工商網監
評論