") 智能交互手部康復(fù)機(jī)器人講解 人機(jī)交互新視野肌電交互
智能交互手部康復(fù)機(jī)器人講解 人機(jī)交互新視野肌電交互
一、產(chǎn)品概述

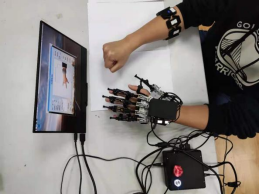
智能交互手部康復(fù)機(jī)器人是以手部康復(fù)外骨骼為被控對(duì)象,配備簡(jiǎn)潔的人機(jī)交互界面,采用模塊化設(shè)計(jì)理念,具有理實(shí)一體、操作簡(jiǎn)單、易于擴(kuò)展等特點(diǎn),極大的提高師生的參與程度,為腦卒中患者提供多用途、層次豐富、安全易用、易于擴(kuò)展的肌電交互系統(tǒng)。該系統(tǒng)融合了 UI交互界面、嵌入式控制器、肌電手環(huán)、手部康復(fù)機(jī)器人系統(tǒng),提供基于 python 語言的統(tǒng)一框架,方便操作者的使用和二次開發(fā),為用戶提供完整的手部康復(fù)機(jī)器人教學(xué)科研環(huán)境。
二、產(chǎn)品特色
?
可穿戴:傳統(tǒng)的人機(jī)交互方式如鍵盤、鼠標(biāo)等不方便攜帶,不適合便攜式人機(jī)交互。而基于表面肌電的人機(jī)交互方式通過采集人體皮膚表面的微弱的生理電信號(hào),實(shí)現(xiàn)對(duì)意圖指令的解碼。肌電手環(huán)具有便攜性,可以穿戴在手臂上,便于實(shí)際場(chǎng)景中實(shí)時(shí)人機(jī)交互。
?
智能識(shí)別:表面肌電信號(hào)是一種時(shí)變的、易受干擾的非平穩(wěn)信號(hào),如何準(zhǔn)確的識(shí)別出人體運(yùn)行意圖至關(guān)重要。通過對(duì)原始信號(hào)進(jìn)行濾波,提取時(shí)頻域統(tǒng)計(jì)學(xué)特征,使用人工智能算法來識(shí)別出人體的意圖,進(jìn)而控制手部機(jī)器人執(zhí)行相應(yīng)的動(dòng)作。
?
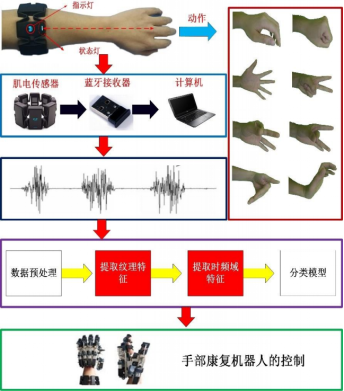
一體化框架:該系統(tǒng)融合了 UI 交互界面、嵌入式控制器、肌電手環(huán)、手部康復(fù)機(jī)器人系統(tǒng),提供基于 python 語言的統(tǒng)一的框架,方便操作者的使用和二次開發(fā),整體流程框架圖如下圖所示。整體框架圖
三、系統(tǒng)性能參數(shù)
智能交互手部康復(fù)機(jī)器人基于嵌入式處理器樹莓派,實(shí)現(xiàn) UI 交互模塊、信號(hào)處理與識(shí)別模
塊、系統(tǒng)控制模塊的集成。
1、交互界面
(1)主界面
智能交互手部康復(fù)機(jī)器人可以實(shí)現(xiàn)被動(dòng)康復(fù)訓(xùn)練和主動(dòng)康復(fù)訓(xùn)練兩部分功能,交互主界面
如下圖所示,可以通過點(diǎn)擊對(duì)應(yīng)圖片選擇相應(yīng)的功能。
交互主界

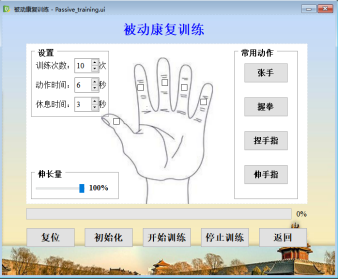
(2)被動(dòng)訓(xùn)練界面
被動(dòng)訓(xùn)練可以自主設(shè)置訓(xùn)練次數(shù),動(dòng)作時(shí)間和休息時(shí)間,同時(shí)也設(shè)置了五指分別運(yùn)動(dòng)以及
張手、握拳、捏手指和伸手指四個(gè)常用動(dòng)作,通過調(diào)節(jié)伸長(zhǎng)量來控制手部張開和閉合的幅度。
被動(dòng)康復(fù)訓(xùn)練界面如圖所示。
被動(dòng)康復(fù)界面
(3)主動(dòng)訓(xùn)練界面
實(shí)現(xiàn)主動(dòng)訓(xùn)練首先要采集患者的肌電數(shù)據(jù),通過在動(dòng)作列表中選擇訓(xùn)練的動(dòng)作進(jìn)行數(shù)據(jù)采
集,將采集完兩輪的數(shù)據(jù)進(jìn)行模型訓(xùn)練,訓(xùn)練好后即可實(shí)現(xiàn)主動(dòng)訓(xùn)練。主動(dòng)康復(fù)訓(xùn)練界面如圖
所示。
主動(dòng)康復(fù)訓(xùn)練界面
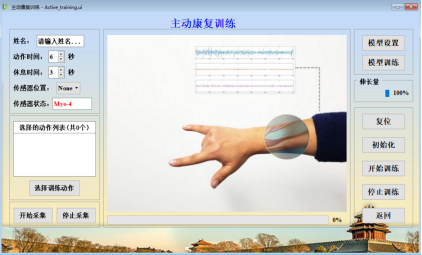
按下開始采集按鈕,會(huì)顯示當(dāng)前需要做的動(dòng)作。按下模型訓(xùn)練按鈕,會(huì)自動(dòng)對(duì)采集的 sEMG
信號(hào)進(jìn)行處理,建立分類識(shí)別模型。模型建立后,按下開始訓(xùn)練按鈕,做出相應(yīng)動(dòng)作,會(huì)控制康復(fù)手同時(shí)做出相同動(dòng)作,實(shí)現(xiàn)主動(dòng)康復(fù)功能。如在訓(xùn)練時(shí)感受到疲憊,可按下停止訓(xùn)練按鈕
暫停訓(xùn)練,在適當(dāng)休息后,也可以再次點(diǎn)擊開始訓(xùn)練按鈕重新訓(xùn)練,最后點(diǎn)擊返回按鈕,會(huì)退
出主動(dòng)康復(fù)訓(xùn)練界面,返回主界面。
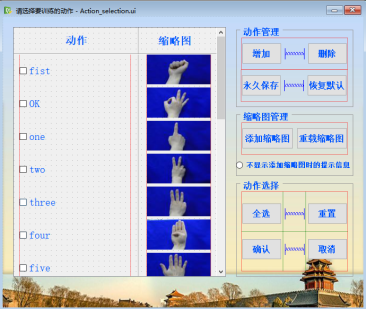
(4)動(dòng)作選擇界面
動(dòng)作選擇界面包含多個(gè)訓(xùn)練動(dòng)作,包含握拳,張手,OK,數(shù)字 1 到 10,捏指等。可以選
擇自己想做的動(dòng)作進(jìn)行訓(xùn)練,同時(shí)也可以隨時(shí)增加或刪除新老動(dòng)作。動(dòng)作選擇界面如圖所示。
動(dòng)作選擇界面
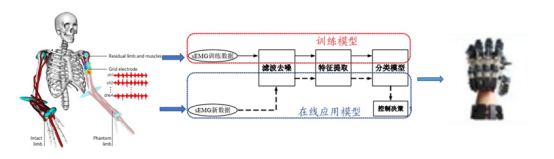
2、信號(hào)處理與模式識(shí)別
采用統(tǒng)計(jì)學(xué)特征和機(jī)器學(xué)習(xí)的方法,從非平穩(wěn)、高噪聲的肌電信號(hào)中解碼出人的動(dòng)作意圖。
首先佩戴肌電手環(huán),然后根據(jù)上位機(jī)界面來做出相應(yīng)的動(dòng)作,同時(shí)采集肌電數(shù)據(jù),之后對(duì)數(shù)據(jù)
進(jìn)行降噪、特征提取和識(shí)別,解碼出人體的運(yùn)動(dòng)意圖。算法處理流程如下圖所示:
信號(hào)處理與模式識(shí)別
3、相關(guān)硬件參數(shù)
手部康復(fù)機(jī)器人控制系統(tǒng):1)整體:包括藍(lán)牙模塊、運(yùn)動(dòng)控制模塊,實(shí)現(xiàn)多種手勢(shì)的實(shí)時(shí)手部機(jī)器人控制。可以快速
搭建手部機(jī)器人研究平臺(tái),支持控制算法和特征工程處理的快速開發(fā)
2)工作技術(shù)參數(shù):
開發(fā)方式:Python
工作范圍:2m*2m
工作環(huán)境溫度:室溫溫度
驅(qū)動(dòng)方式:直流電機(jī)驅(qū)動(dòng)
工作采樣頻率:50HZ
控制模式:位置,速度
實(shí)驗(yàn)工程及 demo:提供實(shí)驗(yàn)工程及 demo
微型直線伺服驅(qū)動(dòng)器:
1)小體積、高功率密度、高重復(fù)定位精度;
2)內(nèi)部集成了微型電機(jī)、減速器、絲桿機(jī)構(gòu)、傳感器以及驅(qū)動(dòng)控制系統(tǒng),集成度
高;
3)接口豐富:
電氣接口:具有 LVTTL3.3V 串口(D 型)和 PWM(
P 型)兩種接口。D 型接口的驅(qū)動(dòng)器
可以配置地址編號(hào)(
ID),多個(gè)不同 ID 的驅(qū)動(dòng)器可以通過串口總線控制。P 型接口的驅(qū)動(dòng)器兼
容標(biāo)準(zhǔn)舵機(jī)接口,支持 50HZ 和 333HZ 兩種頻率的 PWM 控制信號(hào)
機(jī)械接口:具有豐富的接口方式可選,方便用戶安裝使用
4)寬電壓:DC6V~9V 寬電壓范圍供電,建議供電 8V,斷電后不會(huì)丟失位置信息
5)具備過熱、過流保護(hù)功能
樹莓派 3B+:
1)64 位的 1.4GHz 四核 ARM Cortex-A53
2)1GB 內(nèi)存和千兆以太網(wǎng) (最大吞吐量 300Mbps)
3)IEEE 802.11.b/g/n/ac 雙頻 2.4GHz/5GHz 無線網(wǎng)卡
4)低功耗藍(lán)牙 4.2 (BLE)
5)HDMI 接口、PoE 接口和四個(gè) USB 2.0 接口
6)MicroSD 卡插槽7)3.5 mm 音頻輸出接口
8)40PIN GPIO 接口
Myo 肌電手環(huán):
1)手臂尺寸可在 7.5-13 英寸(19-34 厘米)前臂周長(zhǎng)之間展開
2)8 個(gè)醫(yī)用級(jí)不銹鋼肌電圖傳感器
3)重量: 93g
4)1 個(gè)包含三軸陀螺儀、三軸加速度計(jì)、三軸磁強(qiáng)計(jì)的九軸 IMU
5)短、中、長(zhǎng)振動(dòng)的觸覺反饋
6)ARM Cortex M4 處理器
7)雙指示燈 LED 使用藍(lán)牙智能
8)micro-usb 充電,內(nèi)置可充電鋰離子電池一次性使用一整天
9)1 個(gè)肌臂帶 1 根標(biāo)準(zhǔn) micro USB 電纜
10)1 個(gè)藍(lán)牙適配器,用于 Mac 和 Windows PC 連接
11)10 個(gè) MYO 尺寸夾
12)1 個(gè)開放的、免費(fèi)的、有原始數(shù)據(jù)可用的 SDK
康復(fù)手:
剛性手部外骨骼采用 3d 打印材質(zhì),配合金屬零件共同組裝而成;并配用樹脂材料打印的控
制盒,盒內(nèi)集成了樹莓派和電源線、HDMI 走線等,可以實(shí)現(xiàn)樹莓派的開關(guān)及急停功能
四、配套實(shí)驗(yàn)內(nèi)容
模式識(shí)別基礎(chǔ)實(shí)驗(yàn):
1
模式識(shí)別導(dǎo)論
理解模式識(shí)別的定義,了解課程學(xué)習(xí)目標(biāo)、學(xué)習(xí)內(nèi)容和學(xué)習(xí)方法,
激發(fā)學(xué)習(xí)動(dòng)力和學(xué)習(xí)興趣。
2
模式識(shí)別基礎(chǔ)
理解模式識(shí)別的基礎(chǔ)概念:包括特征與特征空間、有監(jiān)督學(xué)習(xí)與
無監(jiān)督學(xué)習(xí)、緊致性、維數(shù)災(zāi)難、泛化能力與過擬合。
3
模式識(shí)別系統(tǒng)
解模式識(shí)別系統(tǒng)的一般結(jié)構(gòu),并理解各個(gè)環(huán)節(jié)的主要任務(wù)4
線性分類器
理解線性分類器的基本原理:包括線性判別和廣義線性判別,多
分類線性判別函數(shù)和線性判別函數(shù)的幾何意義
5
支持向量機(jī)
理解支持向量機(jī)的原理,并能編程實(shí)現(xiàn)支持向量機(jī)去解決簡(jiǎn)單的
模式識(shí)別問題。
6
感知器算法
理解感知器算法的原理,并能編程實(shí)現(xiàn)感知器算法去求解線性分
類器。
7
貝葉斯分類器
理解貝葉斯分類器的原理,并能夠編程實(shí)現(xiàn)貝葉斯分類器。
8
k 近鄰算法
理解 k 近鄰算法的原理,并能夠編程實(shí)現(xiàn) KNN 算法。
9
特征降維
理解特征降維的基本概念,理解特征降維的主要方法,并能夠在
解決模式識(shí)別問題的過程中加以應(yīng)用
10
聚類算法
理解數(shù)據(jù)聚類的基本概念、特點(diǎn)和聚類算法的一般流程,理解常
用數(shù)據(jù)聚類算法的原理,包括試探法聚類、層次法聚類和動(dòng)態(tài)聚
類。
11
組合分類器
理解組合分類器的原理,理解 Adaboost 算法和隨機(jī)森林算法的
基本原理,并能夠編程實(shí)現(xiàn)這兩種算法來解決模式識(shí)別問題。
12
理解人工神經(jīng)元網(wǎng)絡(luò)的基本概念和用于模式識(shí)別的基本原理,理
解 BP 算法的原理,并能夠編程實(shí)現(xiàn) BP 算法
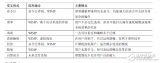
模式識(shí)別高級(jí)實(shí)驗(yàn):
1
sEMG 特征提取
學(xué)習(xí)提取原始數(shù)據(jù)的時(shí)域、頻域和時(shí)頻域等常用特征,將原始數(shù)
據(jù)提煉為特征供分類模型使用。
2
sEMG 特征降維
學(xué)習(xí)主元分析(
PCA)、線性判別分析(
LDA)、獨(dú)立元分析(
ICA)
等常用降維算法,采用降維算法降低 sEMG 特征。
3
神經(jīng)網(wǎng)絡(luò)算法
理解神經(jīng)網(wǎng)絡(luò)算法的原理,進(jìn)而對(duì)深度神經(jīng)網(wǎng)絡(luò)和卷積神經(jīng)網(wǎng)絡(luò)
有所學(xué)習(xí),并能通過編程解決動(dòng)作識(shí)別和康復(fù)評(píng)估的問題。
4
支持向量機(jī)
理解支持向量機(jī)的原理,用于解決動(dòng)作識(shí)別的問題。
5
組合分類器
理解 GBDT 算法和隨機(jī)森林算法的基本原理,并能通過編程實(shí)現(xiàn)
這兩種算法來解決模式識(shí)別問題sEMG 信號(hào)處理實(shí)驗(yàn):
序號(hào)
實(shí)驗(yàn)名稱
課程內(nèi)容
1
sEMG 概念
了解 sEMG 信號(hào)的概念,了解課程學(xué)習(xí)目標(biāo)、學(xué)習(xí)內(nèi)容
2
sEMG 采集
學(xué)習(xí) sEMG 信號(hào)采集方法。
3
sEMG 特征提取
學(xué)習(xí) sEMG 特征提取方法,了解常用的 sEMG 時(shí)域特征、頻域、
時(shí)頻域特征。
4
sEMG 特征選擇
學(xué)習(xí)過濾式、包裹式、嵌入式等特征選擇方法,降低 sEMG 特征。
5
建立動(dòng)作分類模
型
學(xué)習(xí)隨機(jī)森林、神經(jīng)網(wǎng)絡(luò)等常用分類算法,通過 sEMG 進(jìn)行動(dòng)作
分類。
6
動(dòng)作在線識(shí)別
學(xué)習(xí)使用建立的分類模型進(jìn)行在線識(shí)別。
7
建立康復(fù)評(píng)估模
型
學(xué)習(xí)深度、卷積神經(jīng)網(wǎng)絡(luò)等常用分類算法,建立合適的康復(fù)評(píng)估
模型。
8
評(píng)估患者康復(fù)等
級(jí)
通過評(píng)估模型對(duì)患者進(jìn)行康復(fù)等級(jí)評(píng)估,適時(shí)調(diào)整患者的康復(fù)方
案。
五、平臺(tái)配置清單
產(chǎn)品名稱
產(chǎn)品型號(hào)
平臺(tái)配置
智能交互手部康復(fù)機(jī)器人
Robot-HRb
智能交互系統(tǒng)
定制
剛性康復(fù)手
定制
顯示屏
維辰思系列
樹莓派
3b+
電機(jī)
因時(shí) LA-16 型
肌電手環(huán)
8 通道 MYO
-
人機(jī)交互
+關(guān)注
關(guān)注
12文章
1207瀏覽量
55412 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28455瀏覽量
207266 -
醫(yī)療機(jī)器人
+關(guān)注
關(guān)注
3文章
220瀏覽量
55647
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【LeMaker Guitar申請(qǐng)】物流機(jī)器人人機(jī)交互
人機(jī)交互界面設(shè)計(jì)在產(chǎn)品設(shè)計(jì)中的應(yīng)用
人機(jī)交互技術(shù)簡(jiǎn)介
對(duì)人機(jī)交互的概念的理解_人機(jī)交互的基本概念
機(jī)器人嵌入式傳感與人機(jī)交互
人機(jī)交互是什么意思?人機(jī)交互和交互設(shè)計(jì)的區(qū)別是什么?
人機(jī)交互未來新趨勢(shì) 用腦電波手勢(shì)控制機(jī)器人
人機(jī)交互的內(nèi)容有哪些_人機(jī)交互主要研究什么
智能人機(jī)交互是什么
上肢康復(fù)機(jī)器人現(xiàn)狀及研究分析
基于雙串口單片機(jī)的上肢康復(fù)機(jī)器人交互控制系統(tǒng)
什么是人機(jī)交互技術(shù)?
人機(jī)交互技術(shù)是人工智能嗎
機(jī)器人市場(chǎng)化的人機(jī)語音交互






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論