 距離傳感器為例的機器人設計制造說明
距離傳感器為例的機器人設計制造說明
過去,機器人制造是一個非常困難、容易出錯且耗時的過程,因為采用由分立元件構成的裝置實現對環境的感應,而這些裝置中很多部件都不能有效地協同工作,處理器缺乏足夠的能力從多個傳感器收集信息并處理這些信息。下面我們以超聲波距離傳感器為例進行說明機器人設計制造的過程。
構建超聲波傳感器首先需要一個超聲波換能器,然后搭建一些接口電路用來發送脈沖,以及記錄返回信號的時間。連接機器人處理器的接口由指示測試起始時間的輸出信號以及回聲探測定時器計數值的輸入信號組成。處理器獲取所用的總時間并將這個時間轉換成距離。如果需要處理多路回聲,硬件則會變得更加復雜。這種設計不僅受軟硬件局限性的困擾,而且所有的東西都在內部生產,因此增加了成本和上市時間。隨著時間推移,處理器的功能變得越來越強大,以往由單獨硬件處理的任務都可由處理器完成。
通過處理器執行回聲返回處理任務,可以開發出復雜的多路回聲處理算法。這樣一來降低了硬件部分的復雜度,從而降低了成本,不過軟件編程過程依然耗時,因為大多數硬件及其軟件驅動程序是定制的。由于軟件變得更加復雜,因而使當時的處理器負擔很重。那時,為了解決這個問題,通常使用多個處理器,然而卻導致潛在的競爭條件、死鎖以及一些很難重現的各種奇怪問題。
今天,使用現成的、配有各種硬件外設的微控制器或微處理器板已相當普遍。這些外設通常提供硬件接口輔助功能,例如定時器和通信總線,常見的通信總線有RS-232、USB、I2C或CAN總線。使用接口驅動器減輕了軟件實現的負擔。目前很多傳感器利用常見總線進行通信,從而簡化了接口設計。如圖3所示。
許多傳感器還增加了處理能力,從而可以收集經過預處理的更高級別的數據。傳感器的工作不是傳送收發聲納回聲信號所需的時間(毫秒),而是報告距離某個物體的遠近(毫米),收集到的數據可以得到更有效的處理。這樣主處理器就不必進行低級別的運算,而去從事更高級別的任務,例如定位和繪制地圖。
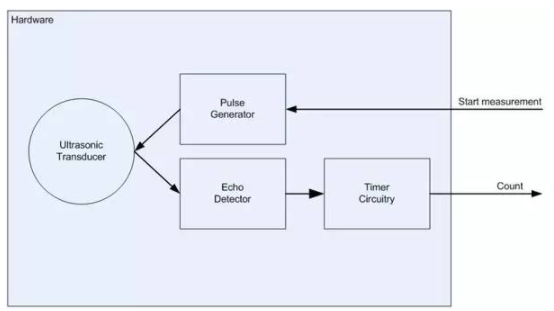
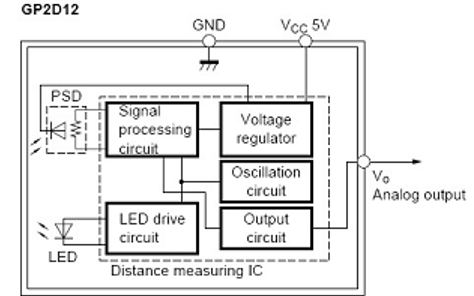
圖1:超聲波距離傳感器系統框圖。
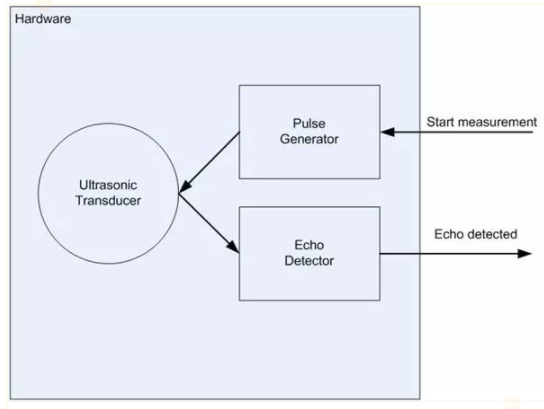
圖2:帶輔助處理器的聲納系統。
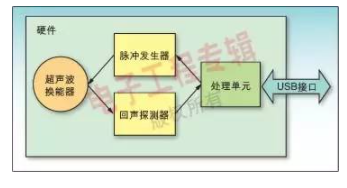
圖3:帶USB接口的傳感器系統。
借助于大量現成的傳感器接口(例如通信鏈路、軟件驅動器以及處理檢測數據的算法),研發工程師就可以更快速地開發和提出解決方案,從而贏得面市時間上的優勢。開發機器人功能的負擔從研發工程師轉移到了傳感器提供者身上。
傳感器系統將繼續受到低成本處理能力以及數據處理算法的影響。受這種增長影響最大的是“傳感器融合”,即傳感器數據流由多個傳感器收集并處理,以產生智能且精確信息流。傳感器數據融合在一起,形成單一的環境。如圖四所示,將紅外距離傳感器與聲納配合,可以探測到多種材料和情形,這是單個器件所不可能獨立實現的。
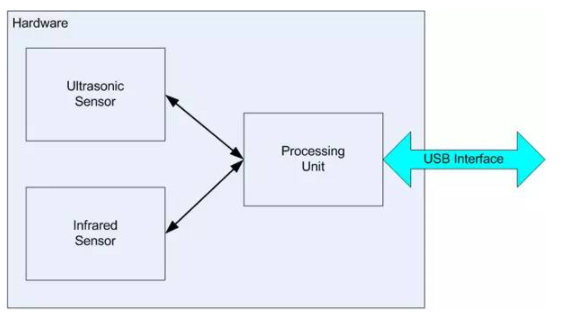
圖4:超聲波和紅外傳感器“融合”在一起。
成熟的軟件算法拓展出很多令人激動的領域,例如面部識別。幾年之前,由于處理能力不足,還無法實時實現這種功能。而現在,已有產品可以實時處理眾多面孔識別。很快,傳感器系統將不再僅僅報告“目標在前方2米處”,而是報告“某某人在前方2米處”。
定位和地圖描繪是另外一個技術領域,近年來業界對此技術的興趣不斷增加。已經有多種現成的SLAM(同步定位與地圖描繪)算法實現可被免費使用或只需支付很低的費用。這種趨勢在很多軟件領域都在出現,并且會繼續發展。
在立體視覺領域也出現了令人激動的增長。單個相機所產生的數據量可能非常大,但是立體視覺使數據量更大,因為需要兩部相機同時工作。這在通信鏈路、處理能力和軟件算法成熟之前,只是一個遙遠的可能性。而今,現成的系統就可以實現距離探測。隨著這些系統不斷改進,它們的速度和精度使其成為其他形式的距離測量可選方案。超聲波、紅外和立體視覺的“融合”系統將能夠在任何環境中工作。
未來,傳感技術將不斷發展。機器人能夠有效處理的傳感器數量將具有與摩爾定律所預測的“晶體管集成速度”相似的增長曲線。
作者: Jon Mandrell,CoroWare公司
-
傳感器
+關注
關注
2552文章
51302瀏覽量
755245 -
機器人
+關注
關注
211文章
28566瀏覽量
207716 -
紅外傳感器
+關注
關注
9文章
520瀏覽量
47634 -
超聲波傳感器
+關注
關注
18文章
584瀏覽量
35961
發布評論請先 登錄
相關推薦
《機器人設計與實現》——低成本DIY機器人,一本機器人制作的經典入門書
【orangepi zero申請】基于香橙pi的機器人設計
超聲波傳感器在機器人中的應用
基于多傳感器數據融合的智能機器人設計
超聲波傳感器在機器人避障中有什么作用
距離傳感器有什么用
機器人設計教程之機器人傳感子系統的詳細資料概述
機器人設計教程之基于“創意之星”的機器人設計資料說明






 工商網監
工商網監
評論