 如何使用ESP8266和ArduinoUno設計無線遙控兩輪機器人漫游車
如何使用ESP8266和ArduinoUno設計無線遙控兩輪機器人漫游車
該項目展示了如何使用ESP8266和ArduinoUno設計無線遙控兩輪機器人漫游車。
本教程展示了如何使用連接到ESP8266Wi-fi模塊的ArduinoUno和兩個步進電機,通過Wi-Fi網絡設計遠程控制的兩輪機器人漫游車。可以使用HTML設計的界面從普通的互聯網瀏覽器控制機器人。Android智能手機用于將視頻和音頻從機器人廣播到操作員的控制界面。
網上有很多形狀、尺寸和價格各異的機器人套件。但是,根據您的應用,它們都不適合,您可能會發現它們對于您的實驗來說太昂貴了。或者,也許您只是想制作您的機械結構,而不是購買完整的機械結構。本教程還展示了如何為您自己的機器人項目設計和構建低成本的亞克力框架,對于那些沒有的人,只需使用普通工具使用那些昂貴的3D打印機或激光切割機。展示了一個簡單的機器人平臺。
第1步:工具

構建這個原型需要以下工具:
手鋸(用于對亞克力板進行初始切割)
螺絲刀(用于螺栓和螺母的放置)
尺子(尺寸測量用)
美工刀(用于切割亞克力板)
鉆孔機(為螺栓鉆孔)
砂紙(平滑粗糙的邊緣)
第二步:機械結構和材料

要構建定制機器人,首先您必須設計機械結構。這可能很容易,具體取決于您的應用程序,或者充滿細節和限制。根據模型的復雜程度,您可能需要在3DCAD軟件中對其進行設計或僅在2D中進行繪制。
如果您不想構建自己的機械結構,也可以在線購買完整的結構。網上有很多機器人套件。在這種情況下,您可能會跳到第6步。
在本教程中,我們設計了一個低成本的亞克力框架,用于連接電機和其他組件。本教程中介紹的結構是使用123DDesignCAD軟件進行3D設計的。每個零件后來都使用Draftsight軟件轉換為2D。
使用了以下材料:
2mm亞克力板
42x19mm車輪,帶橡膠胎面輪胎(x2)
49x20x32mm鋼球萬向輪(x1)
M2x10mm螺栓(x12)
M2x1,5mm螺母(x12)
M3x10mm螺栓(x8)
M3x1,5mm螺母(x8)
5/32“x1”螺栓(x3)
5/32“螺母(x6)
手持自拍桿夾
3x3厘米鋁制支架(x4)
基地結構的建設分為以下幾個步驟:
根據二維圖中的尺寸切割亞克力底座;
在二維圖中所示位置鉆孔;
根據3D圖紙使用螺栓和螺母安裝組件。
不幸的是,步進電機軸的直徑大于輪子上的孔口。因此,您可能需要使用膠水來連接這些組件。在本教程中,我在電機軸和車輪之間臨時搭建了一個木制聯軸器。
第3步:切割結構
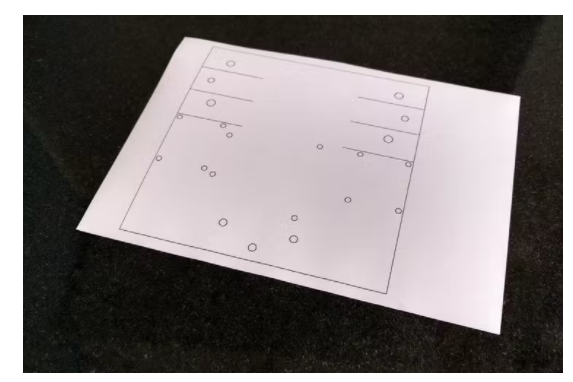
首先,您需要將模型的尺寸轉移到亞克力板上。使用普通打印機在不干膠紙上打印您的2D繪圖,然后將紙張切割成合適的尺寸并將該遮罩貼在亞克力表面上。
您可以使用手鋸根據您的尺寸切割亞克力或使用下面描述的斷裂技術。
用美工刀和尺子或刻度尺,沿直線切割亞克力。您不需要一直切割整個片材,只需對其進行評分以創建一些軌道,然后將在該軌道上切割該片材。
將亞克力放在平坦的表面上,用一些夾子將其固定到位并施加一些壓力,直到板材斷裂成兩半。重復此過程,直到完成所有切割。之后,您可以使用砂紙打磨粗糙的邊緣。
第4步:鉆孔底座
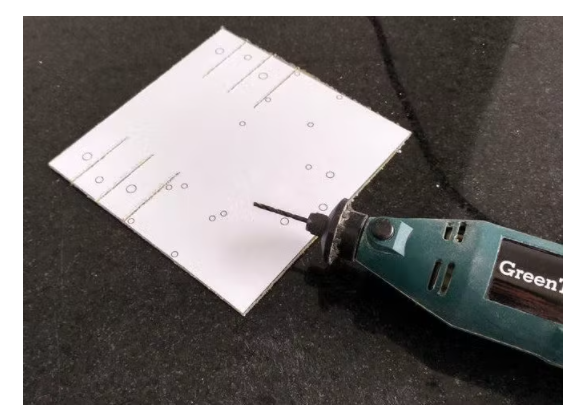
用鉆孔機在二維圖(面罩中所示)所示位置鉆孔。
亞克力相對容易鉆孔。因此,如果您不處理鉆孔機,則可以使用鋒利的工具(如美工刀)手動鉆孔。您也可以使用它來擴大小孔以適應螺栓尺寸。
取下面罩,您的底座就準備好了。
第5步:組裝結構
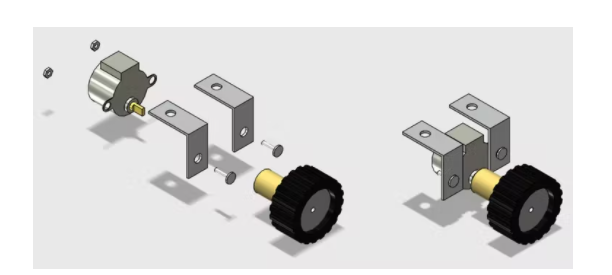
根據圖片用螺栓和螺母安裝組件,您的結構就準備好了。
M3螺栓用于安裝步進電機,而5/32”螺栓用于安裝前輪和智能手機夾。
現在,可以開始在以下步驟中組裝電路
第6步:電子產品

您將需要以下電子元件:
ArduinoUno
ESP8266
Protoshield或普通面包板
1kohm電阻器(x2)
10kohm電阻(x1)
一些跳線
帶ULN2003driver的步進電機(x2)
一臺電腦(用于編譯和上傳Arduino代碼)
移動電源
USB電纜
您不需要特定的工具來組裝電路。所有組件都可以在您最喜歡的電子商務商店在線找到。該電路由連接到ArduinoUSB端口的移動電源供電。
根據原理圖連接所有組件。您需要一些跳線來連接ESP-8266模塊和步進電機。您可以使用protoshield(用于更緊湊的電路)、普通面包板,或設計您自己的Arduino擴展板。將USB電纜插入ArduinoUno板并繼續下一步。
第7步:Arduino代碼
安裝最新的ArduinoIDE。在這個項目中stepper.h庫用于控制步進電機。與ESP-8266模塊通信不需要額外的庫。請檢查您的ESP8266的波特率并在代碼中正確設置。
下載Arduino代碼(stepperRobot.ino)并用您的wifi路由器SSID替換XXXXX,用路由器密碼替換YYYYY。將Arduino板連接到您的計算機USB端口并上傳代碼。
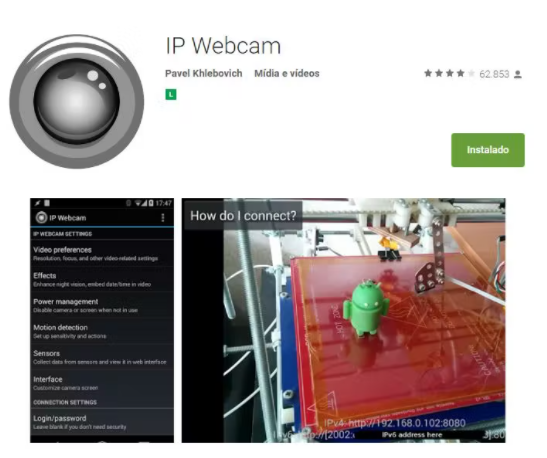
第8步:Android網絡攝像頭
第9步:將電路放入機器人中
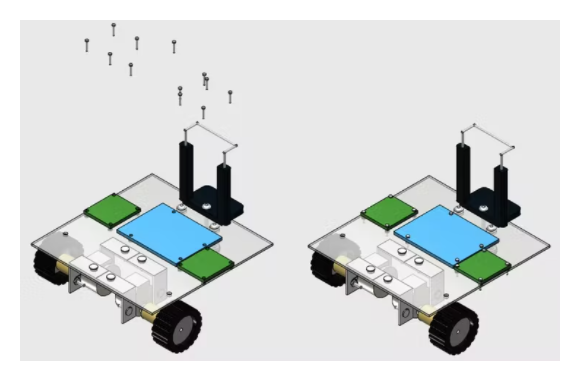
使用一些M1螺栓將電路安裝在機器人頂部,如圖所示。
之后,使用雙面膠帶將您的移動電源粘在機器人背面(因為以后很容易取下),然后將您的智能手機放入夾子中。
第10步:基于Web的控制界面
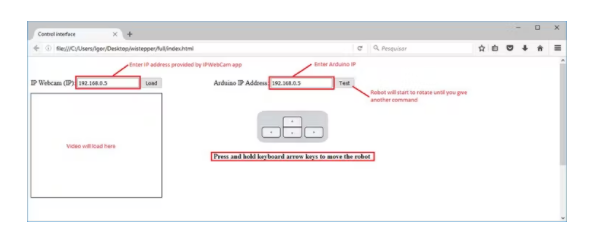
為控制機器人設計了一個html界面。
下載interface.rar并將所有文件解壓到指定文件夾。然后在Firefox上打開它。
在該界面中使用文本框形式輸入ESP模塊和視頻/音頻服務器(來自AndroidIP網絡攝像頭應用程序)的IP地址。
有一個測試但是,它將使機器人旋轉,直到收到另一個命令。鍵盤方向鍵用于向前或向后移動機器人,以及向左或向右旋轉。
第11步:使用
當Arduino重新啟動時,它會嘗試自動連接您的Wi-Fi網絡。使用串行監視器檢查連接是否成功,并獲取路由器分配給ESP-8266的IP。在Internet瀏覽器(Firefox)中打開html文件并在文本框中告知此IP地址。
您還可以使用其他方法來找出路由器分配給設備的IP地址。
斷開ArduinoUno與計算機的連接并將其連接到移動電源。等待它再次連接。
在連接到機器人的智能手機中啟動IP網絡攝像頭應用程序。在您的控制界面上輸入視頻/音頻IP并連接到服務器,您就可以開始使用了。您可能需要降低應用中視頻的分辨率,以減少傳輸期間的延遲。
單擊并按住鍵盤上的箭頭按鈕以旋轉機器人或向前/向后移動機器人,并享受探索環境的樂趣。
-
機器人
+關注
關注
211文章
28476瀏覽量
207412 -
步進電機
+關注
關注
150文章
3113瀏覽量
147574 -
Wi-Fi模塊
+關注
關注
0文章
33瀏覽量
11163 -
ESP8266
+關注
關注
50文章
962瀏覽量
45109
發布評論請先 登錄
相關推薦
人形機器人“造車”,車企扎堆布局!

Made with KiCad(十二):JPL開源漫游車
esp32和esp8266代碼共用嗎
esp8266和esp32區別是什么
esp8266不燒錄可以使用嗎
esp8266wifi模塊怎么連接手機
兩個ESP8266模塊之間如何進行TCP通信?
請問ESP8266為什么無法加入AP?
國產低成本Wi-Fi SoC解決方案芯片ESP8266與ESP8285對比差異
使用Wi-Fi ESP8266方案模組接入云平臺






 工商網監
工商網監
評論