") BLDC 電機的構(gòu)造與感應(yīng)和有刷直流電機的比較
BLDC 電機的構(gòu)造與感應(yīng)和有刷直流電機的比較
電氣設(shè)備通常具有至少一個電機,用于將物體從其初始位置旋轉(zhuǎn)或移動。市場上有多種電機類型可供選擇,包括感應(yīng)電機、伺服電機、直流電機(有刷和無刷)等。根據(jù)應(yīng)用要求,可以選擇特定的電機。然而,當(dāng)前的趨勢是大多數(shù)新設(shè)計正在轉(zhuǎn)向無刷直流電機,即俗稱的 BLDC 電機。
本文將重點介紹 BLDC 電機設(shè)計的以下方面:
BLDC 電機的構(gòu)造
BLDC 電機的操作
扭矩和效率要求
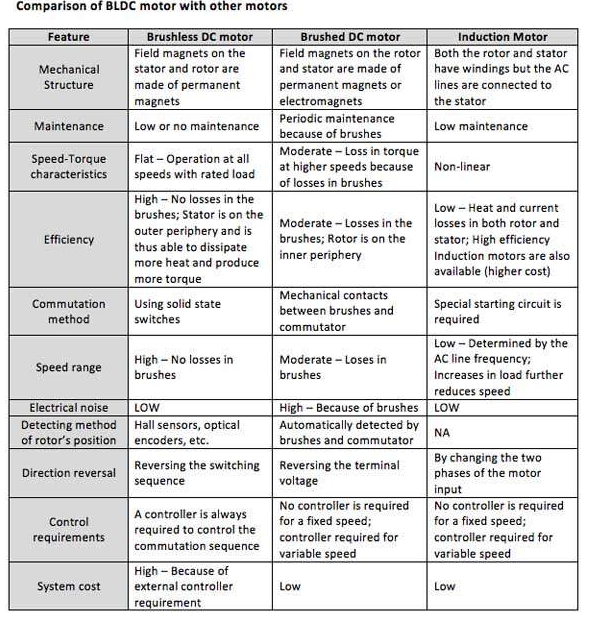
與感應(yīng)和有刷直流電機的比較
BLDC 電機的選擇標(biāo)準(zhǔn)
電機控制——速度、位置和扭矩,將在本文的第二部分中介紹。
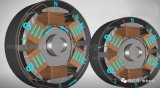
建造BLDC 電機在結(jié)構(gòu)和工作原理方面分別與交流感應(yīng)電機和有刷直流電機有許多相似之處。與所有其他電機一樣,BLDC 電機也有轉(zhuǎn)子和定子。
定子
與感應(yīng)交流電機類似,BLDC 電機定子由疊層鋼制成,??堆疊起來承載繞組。定子中的繞組可以有兩種排列方式;即星形圖案(Y)或三角形圖案(Δ)。兩種模式之間的主要區(qū)別在于,Y 模式在低轉(zhuǎn)速時提供高扭矩,而 Δ 模式在低轉(zhuǎn)速時提供低扭矩。這是因為在 Δ 配置中,一半的電壓施加在未驅(qū)動的繞組上,從而增加了損耗,進而增加了效率和扭矩。
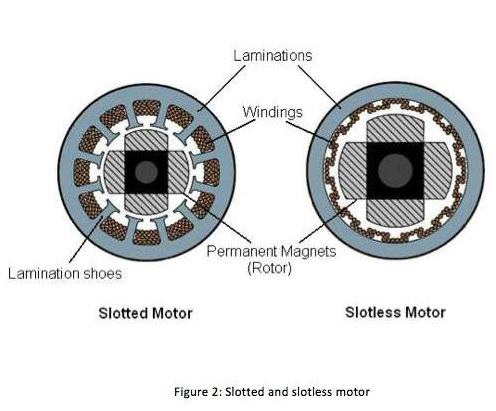
定子中的鋼疊片可以是有槽的或無槽的,如圖 2 所示。無槽鐵芯具有較低的電感,因此它可以以非常高的速度運行。由于疊片組中沒有齒,對齒槽轉(zhuǎn)矩的要求也降低了,因此也使其成為低速的理想選擇(當(dāng)轉(zhuǎn)子上的永磁體和定子上的齒相互對齊時,因為兩者之間的相互作用,會產(chǎn)生不希望的齒槽轉(zhuǎn)矩并導(dǎo)致速度波動)。無槽鐵芯的主要缺點是成本較高,因為它需要更多繞組來補償較大的氣隙。
正確選擇用于構(gòu)造定子的疊層鋼和繞組對電機性能至關(guān)重要。選擇不當(dāng)可能會導(dǎo)致生產(chǎn)過程中出現(xiàn)多個問題,從而導(dǎo)致市場延遲和設(shè)計成本增加。
轉(zhuǎn)子
典型 BLDC 電機的轉(zhuǎn)子由永磁體制成。根據(jù)應(yīng)用要求,轉(zhuǎn)子中的極數(shù)可能會有所不同。增加極數(shù)確實會提供更好的扭矩,但代價是降低最大可能速度。
另一個影響最大扭矩的轉(zhuǎn)子參數(shù)是用于制造永磁體的材料。材料的磁通密度越高,扭矩就越高。
工作原理及操作
BLDC 電機工作的基本原理與有刷直流電機相同;即內(nèi)部軸位置反饋。在有刷直流電機的情況下,使用機械換向器和電刷實現(xiàn)反饋。借助內(nèi)置 BLDC 電機,可使用多個反饋傳感器來實現(xiàn)。最常用的傳感器是霍爾傳感器和光學(xué)編碼器。注意:霍爾傳感器根據(jù)霍爾效應(yīng)原理工作,即當(dāng)載流導(dǎo)體暴露在磁場中時,電荷載流子會受到基于導(dǎo)體兩側(cè)產(chǎn)生的電壓的力。
如果磁場方向反轉(zhuǎn),產(chǎn)生的電壓也會反轉(zhuǎn)。對于 BLDC 電機中使用的霍爾效應(yīng)傳感器,每當(dāng)轉(zhuǎn)子磁極(N 或 S)經(jīng)過霍爾傳感器附近時,它們都會產(chǎn)生一個高或低電平信號,該信號可用于確定軸的位置。
在換向系統(tǒng)中——基于使用反饋傳感器識別的電機位置的換向系統(tǒng)——三個電氣繞組中的兩個一次通電,如圖 4 所示。
在圖 4 (A) 中,標(biāo)記為“001”的綠色繞組通電為北極,標(biāo)記為“010”的藍(lán)色繞組通電為南極。由于這種激勵,轉(zhuǎn)子的南極與綠色繞組對齊,而北極與標(biāo)記為“100”的紅色繞組對齊。為了移動轉(zhuǎn)子,“紅色”和“藍(lán)色”繞組沿圖 4(B) 所示的方向通電。這導(dǎo)致紅色繞組成為北極而藍(lán)色繞組成為南極。由于排斥力(紅色繞組 - 北 - 北對齊)和吸引力(藍(lán)色繞組 - 北 - 南對齊)的發(fā)展,定子中磁場的這種移動會產(chǎn)生扭矩,從而使轉(zhuǎn)子沿順時針方向移動。
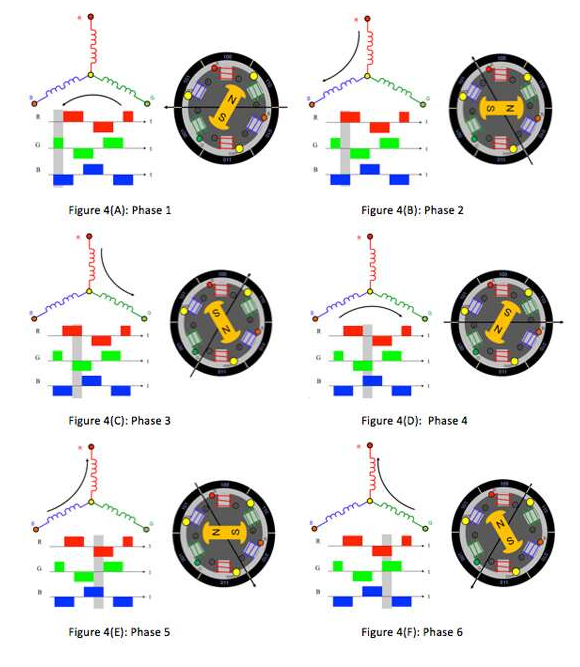
當(dāng)轉(zhuǎn)子開始移動時,該扭矩達(dá)到最大值,但隨著兩個磁場相互對齊,扭矩會減小。因此,為了保持扭矩或建立旋轉(zhuǎn),定子產(chǎn)生的磁場應(yīng)該不斷切換。為了趕上定子產(chǎn)生的磁場,轉(zhuǎn)子將繼續(xù)旋轉(zhuǎn)。由于定子和轉(zhuǎn)子的磁場都以相同的頻率旋轉(zhuǎn),因此它們屬于同步電動機的范疇。
定子的這種切換以建立旋轉(zhuǎn)稱為換向。對于三相繞組,換相有 6 個步驟;即,6 種獨特的組合,其中電機繞組將通電。
本文第二部分將討論用于實現(xiàn) BLDC 電機的驅(qū)動電路和波形。
扭矩和效率
對于電動機的研究,扭矩是一個非常重要的術(shù)語。根據(jù)定義,扭矩是力使物體繞其軸旋轉(zhuǎn)的趨勢。
因此,為了增加扭矩,要么必須增加力——這需要更強的磁鐵或更大的電流——要么必須增加距離——這需要更大的磁鐵。效率對于電機設(shè)計至關(guān)重要,因為它決定了消耗的電量。效率更高的電機也將需要更少的材料來產(chǎn)生所需的扭矩。
在哪里,
了解了上面提供的方程式后,了解速度與扭矩曲線變得很重要。
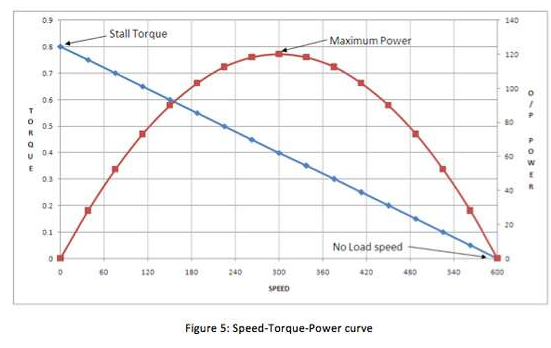
以下是圖 5 所示圖表的要點:
隨著速度的增加,扭矩減小(考慮到輸入功率是恒定的)。
當(dāng)速度為“空載”速度的一半且扭矩為失速扭矩的一半時,可以提供最大功率。
應(yīng)用
單速- 對于單速應(yīng)用,感應(yīng)電機更適合,但如果必須隨著負(fù)載的變化保持速度,那么由于 BLDC 電機的速度-轉(zhuǎn)矩曲線平坦,BLDC 電機非常適合此類應(yīng)用程序。
可調(diào)速- BLDC 電機更適合此類應(yīng)用,因為變速感應(yīng)電機還需要額外的控制器,從而增加系統(tǒng)成本。由于定期維護,有刷直流電機也將成為更昂貴的解決方案。
位置控制– 不需要像電磁爐這樣的應(yīng)用程序進行精確控制,而且維護成本低;BLDC 電機在這里也是贏家。然而,對于此類應(yīng)用,BLDC 電機使用光學(xué)編碼器,并且需要復(fù)雜的控制器來監(jiān)控扭矩、速度和位置。
低噪聲應(yīng)用——有刷直流電機以產(chǎn)生更多 EMI 噪聲而聞名,因此 BLDC 更適合,但對 BLDC 電機的控制要求也會產(chǎn)生 EMI 和可聽噪聲。然而,這可以通過使用磁場定向控制 (FOC) 正弦 BLDC 電機控制來解決。
-
emi
+關(guān)注
關(guān)注
53文章
3597瀏覽量
127899 -
BLDC
+關(guān)注
關(guān)注
207文章
803瀏覽量
97038
發(fā)布評論請先 登錄
相關(guān)推薦
無刷直流電機(BLDC)構(gòu)成、應(yīng)用領(lǐng)域及工作原理詳解
什么是無刷直流電機(BLDC)以及它的應(yīng)用
驅(qū)動有刷直流電機的簡便方法

無刷直流電機與有刷直流電機的區(qū)別

無刷直流電機與有刷直流電機的區(qū)別





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論