 EtherCAT運動控制器(三)PLC實現多軸直線插補
EtherCAT運動控制器(三)PLC實現多軸直線插補
XPLC006E功能簡介
XPLC006E是正運動運動控制器推出的一款多軸經濟型EtherCAT總線運動控制器,XPLC系列運動控制器可應用于各種需要脫機或聯機運行的場合。
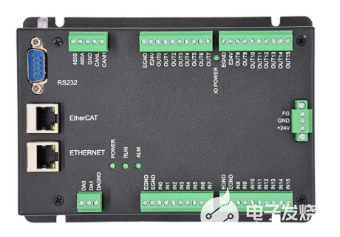
XPLC006E自帶6個電機軸,最多12軸運動控制(含虛擬軸數),支持12軸直線插補、電子凸輪、電子齒輪、同步跟隨、虛擬軸設置等功能。
XPLC006E支持多任務同時運行,同時可以在PC上直接仿真運行,編程方式多種可選,支持ZDevelop軟件的Basic/PLC梯形圖/HMI組態和常用上位機軟件編程。
XPLC006E只支持EtherCAT總線軸,不支持脈沖軸和編碼器軸。采用EtherCAT總線與驅動器通訊,1ms的刷新周期。
XPLC006E支持PLC、Basic、HMI組態三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、VB、matlab、Qt、Linux、.Net、iMAC、Python、 ROS等接口。
→此款產品有XPLC004E、XPLC006E、XPLC008E三個不同軸數的型號可選。
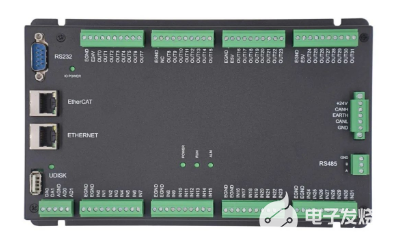
XPLC864E2功能簡介
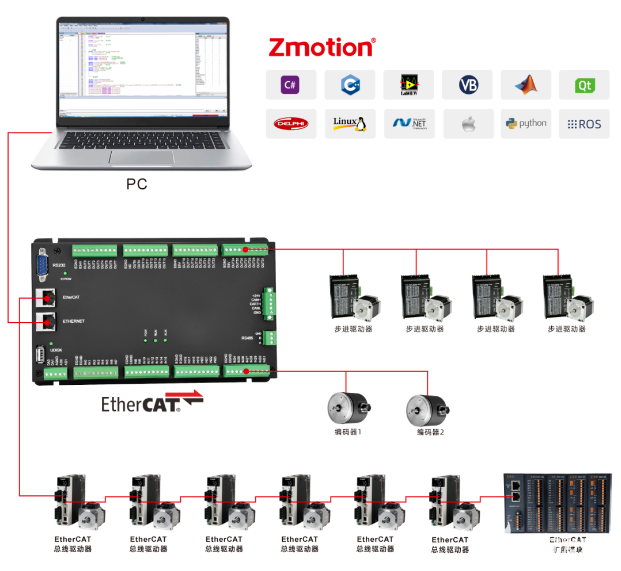
XPLC864E2在XPLC006E的功能基礎上做了升級(即上節介紹的XPLC006E的功能都支持),部分資源空間優于XPLC006E,使用方法基本一致,不同之處在于XPLC864E2,硬件支持32點輸入、32點輸出、2個ADC、2個DAC,支持脈沖軸和總線軸混合使用,總實軸軸數為8,除了帶EtherCAT接口之外,輸出口硬件上可配置為8個軸的脈沖方向信號輸出,另帶兩路編碼器輸入,可由輸入口配置。
XPLC864E2支持PLC、Basic、HMI組態三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、VB、matlab、Qt、Linux、.Net、iMAC、Python、 ROS等接口。
XPLC系列經濟型EtherCAT總線運動控制器支持多種編程方式,支持使用正運動技術自主研發的ZDevelop開發環境的basic語言和PLC梯形圖,上一節講解了Basic開發,本節內容主要講解PLC梯形圖的開發。
XPLC006E使用PLC編程時,軸的運動指令調用Basic封裝的指令。
PLC梯形圖執行從左側的母線開始,從左至右,從上至下依次掃描,從第一行程序開始順序掃描到END為一個掃描周期,然后又開始新一輪程序掃描,直到程序被停止。
PLC編程方式有兩種,通常選擇梯形圖編程,熟悉指令的用戶也可選擇語句表的編程方式。
一前期準備工作
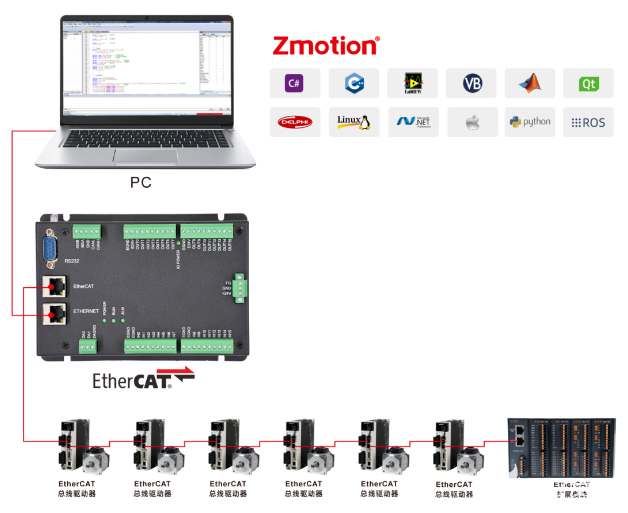
在正運動技術官網下載新版編程軟件ZDevelopV3.10.06,準備一臺XPLC系列經濟型EtherCAT總線運動控制器,按照上方的XPLC006E參考架構完成接線。
沒有控制器的場合也可完成ZBasic的開發,程序下載到仿真器運行即可,仿真器是ZDevelop軟件安裝包自帶的。
二下載PLC程序到控制器
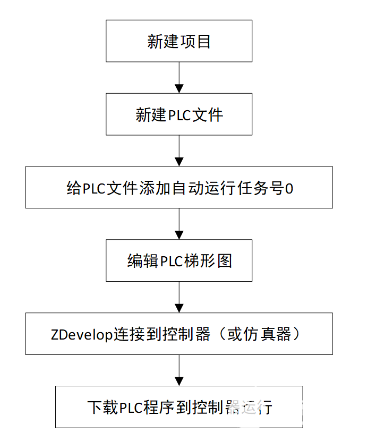
1.新建工程項目,并下載PLC程序文件到控制器運動的流程如下圖。
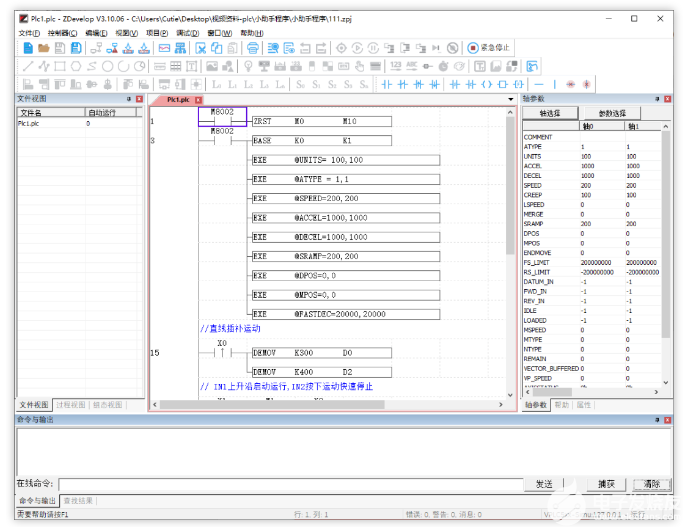
2.打開已有的項目文件運行,需要打開zpj文件,再連接控制器,下載程序運動。PLC編程界面如下所示:
PLC的自動運行的主文件建議只設置一個,使得PLC只有一個主循環,其他模塊在主循環中調用。
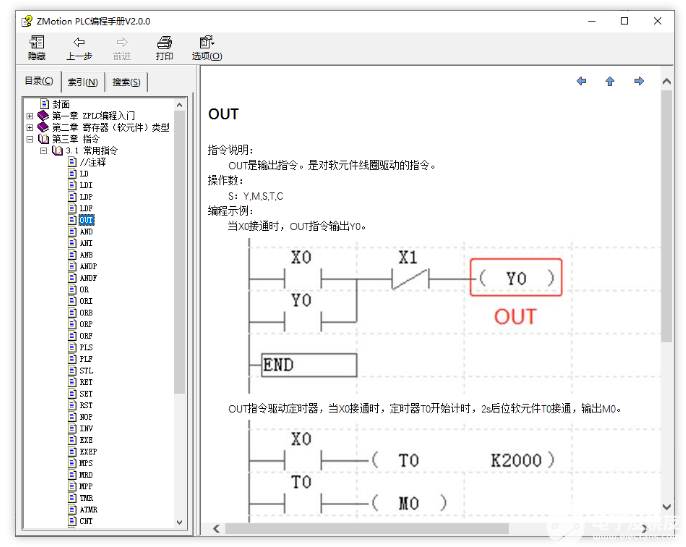
PLC指令均不分大小寫,PLC指令請參考《ZMotion PLC編程手冊》,手冊可在軟件的幫助菜單欄快速打開。
三PLC梯形圖編程
梯形圖編程方式就是使用順序符號和軟元件編號在編程界面上畫出順控梯形圖的方式,由于順控回路是通過觸點符號和線圈符號來表現的,顯示更加直觀,程序的內容更易理解。
在梯形圖顯示狀態下程序監控與調試更為便捷,梯形圖顯示示例如下所示。
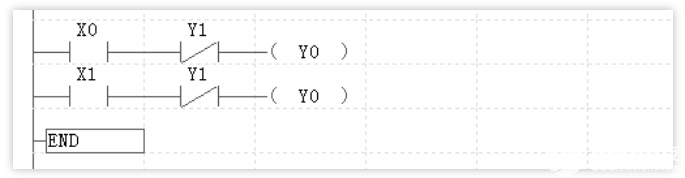
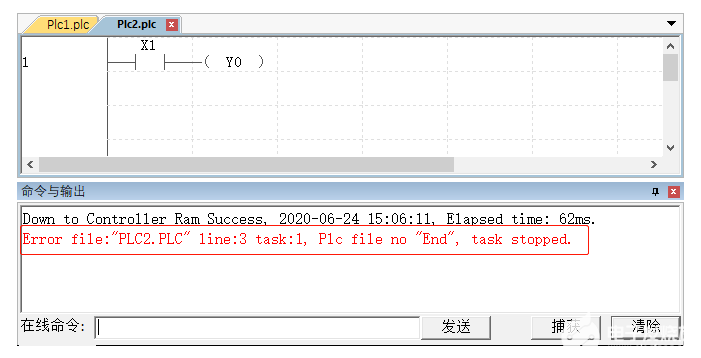
程序結尾一定要包含END程序結束指令,否則報錯,無法下載到控制器執行。
1.PLC指令按照指令的用途將指令分為如下幾個類別。
A.常用指令:包含取觸點、輸出線圈、定時器、計數器等常用指令。B.觸點比較指令:比較兩個寄存器的值,滿足條件觸點導通。C.傳送和比較指令:寄存器之間數據按規則比較和傳送。D.循環和跳轉指令:包括條件循環指令,跳轉到子程序執行指令。E.運算指令:包含四則運算和邏輯運算指令。F.移位指令:將源操作數的數據按位移動。G.數據處理指令:執行其他運算,例如編碼、譯碼等。H.浮點運算指令:針對32位浮點數的運算。
I.其他指令:軸運動相關參數。
2.PLC指令根據操作數的位長分為16位指令和32位指令兩種。
16位數據和32位數據處理采用不同的指令,除了數據長度不同外,二者其他方面均相同,處理數據類型均為有符號數。
16位指令:傳送的數值范圍:-32768 -+32767。
32位指令:傳送的數值范圍:-2147483648 - +2147483647。32位指令一般占用連續兩個16位空間。
3.根據指令的執行方式的不同,分為連續執行型和脈沖執行型兩種。
連續執行型:滿足條件,每個掃描周期都執行一次。
脈沖執行型:滿足條件,僅執行一次。連續執行型指令添加符號P表示脈沖執行型指令。
4.PLC軟元件一覽表。
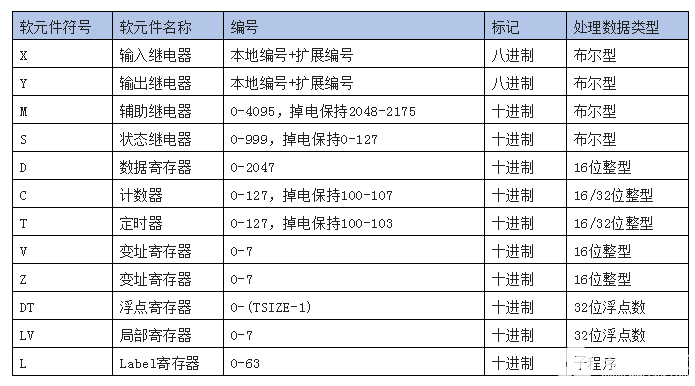
計數器C和定時器T的數據類型與訪問時使用的指令有關,通過16位指令訪問時自動使用低16位,通過32位指令訪問時使用32位。
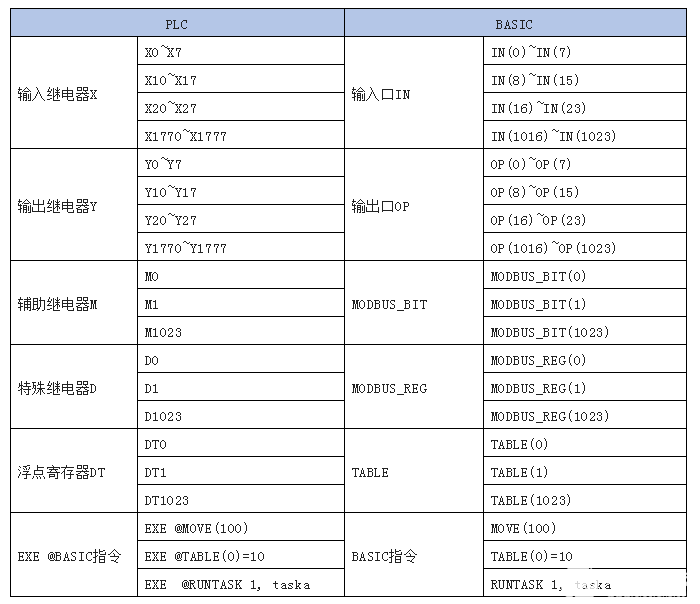
5.PLC與Basic相關寄存器對應關系。
四PLC調用Basic指令
PLC可以通過EXE指令或EXEP指令調用Basic標準指令。EXEP指令是EXE指令的脈沖形式,僅在驅動輸入由OFF變為ON后,才調用Basic標準指令。
語法格式如下:
“EXE @BASIC指令”等價于“BASIC指令”
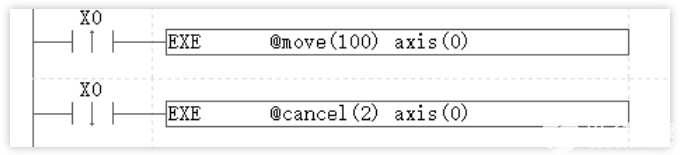
注意:使用EXE指令調用寄存器時,@之后要參照Basic的語法,不可出現“EXE @DT0=10”,正確寫法應是“EXE @TABLE(0)=10”。
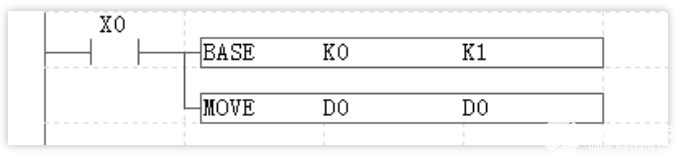
在PLC里調用Basic直線插補語法如上圖,直線插補PLC語法“MOVE D0 D2”,操作數應該為PLC操作數支持的格式,插補數據由寄存器傳遞,不能直接給出。
五PLC直線插補例程
控制脈沖軸軸0和軸1直線插補運動,軸參數和運動指令使用EXE調用Basic指令,將寫好的程序下載XPLC006E上調試運行。
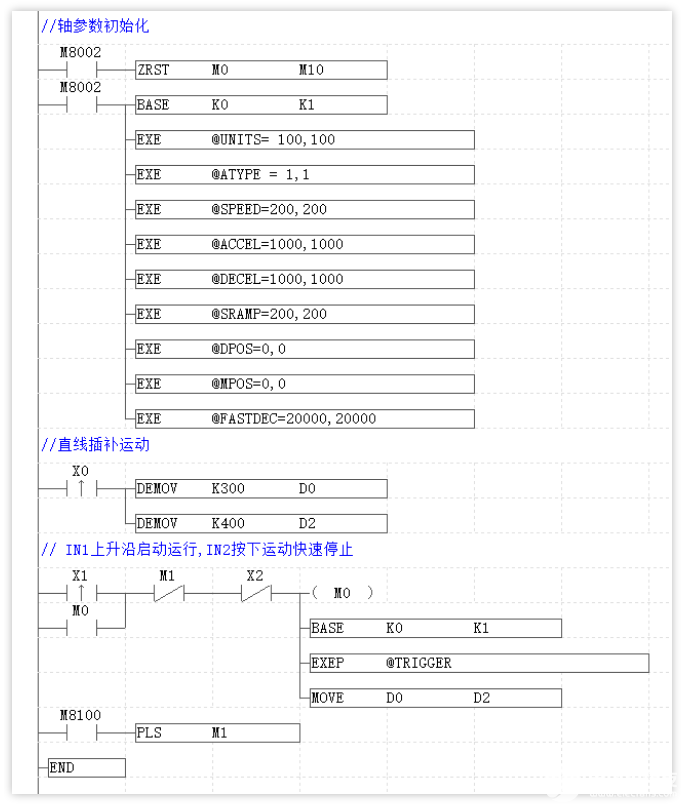
1.PLC控制程序如下。
2.程序說明。
程序上電初始化時,對軸的各種參數進行初始化。
當X0上升沿觸發時,對存儲兩個軸運動距離的寄存器D0、D2進行賦值,當X1上升沿觸發啟動示波器采樣、開啟MOVE直線插補運動并且M0自鎖,軸0運動距離為300,軸1運動距離為400。
M8100為軸0的IDLE標志,當運動完成時,軸0停止,M8100變為ON,M1被置位一個周期,M1的常閉觸點斷開一個周期,M0自鎖取消。
再次按下X1,MOVE再次執行軸0軸1直線插補運動。
X2為急停按鈕,若軸在運動中按下X2,按FASTDEC快減速設置的值快速停下。
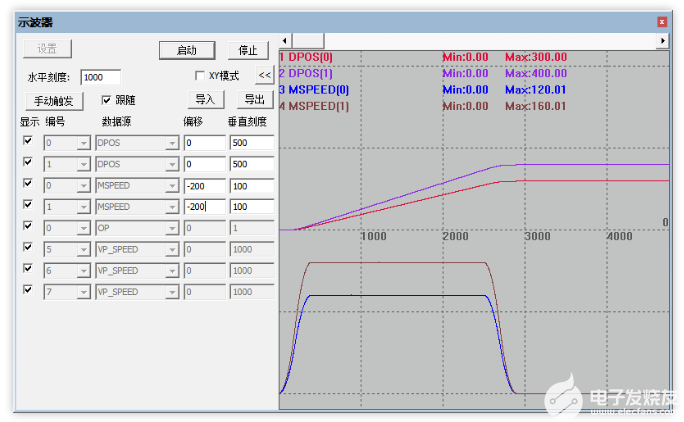
3.示波器采樣的軸0軸1的位置和速度曲線如下所示。
4.以上PLC程序在Basic里實現的程序如下。
FOR i=0 TO 10 'MODBUS_BIT寄存器清0
MODBUS_BIT(i)=0
NEXT
BASE(0,1) '軸0和軸1參數初始化
UNITS = 100,100
ATYPE =1,1
SPEED = 200,200
ACCEL = 1000,1000
DECEL = 1000,1000
SRAMP = 200,200
DPOS = 0,0
MPOS = 0,0
FASTDEC = 20000,20000
WHILE 1 '循環檢測輸入
IF IN_SCAN(0,2) THEN '掃描IN0-2口電平變化
IF IN_EVENT(1)> 0 THEN '啟動
TRIGGER
MOVE(300,400)
ELSEIF IN_EVENT(2)> 0 THEN '停止
RAPIDSTOP(2)
ENDIF
ENDIF
WEND
END
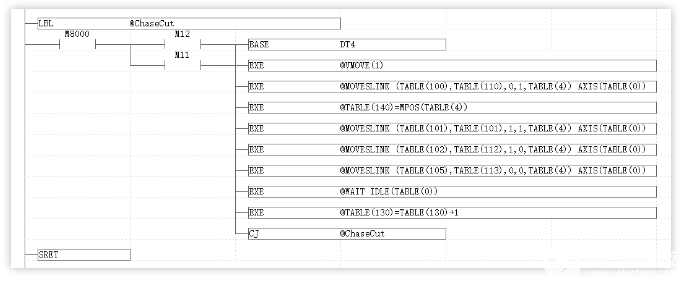
六PLC追剪(電子凸輪)例程
PLC通過調用Basic的MOVESLINK自動凸輪命令完成追剪過程,MOVESLINK自動凸輪的從軸自動規劃速度跟隨主軸運動,指令用法參見Basic編程手冊,PLC程序的主要組成部分如下:
1.初始化部分
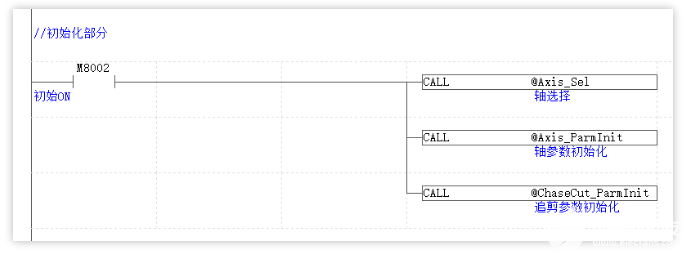
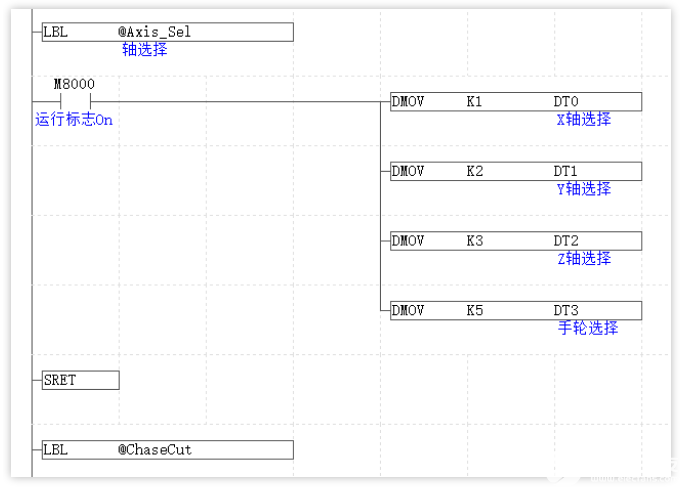
2.選擇追剪軸號
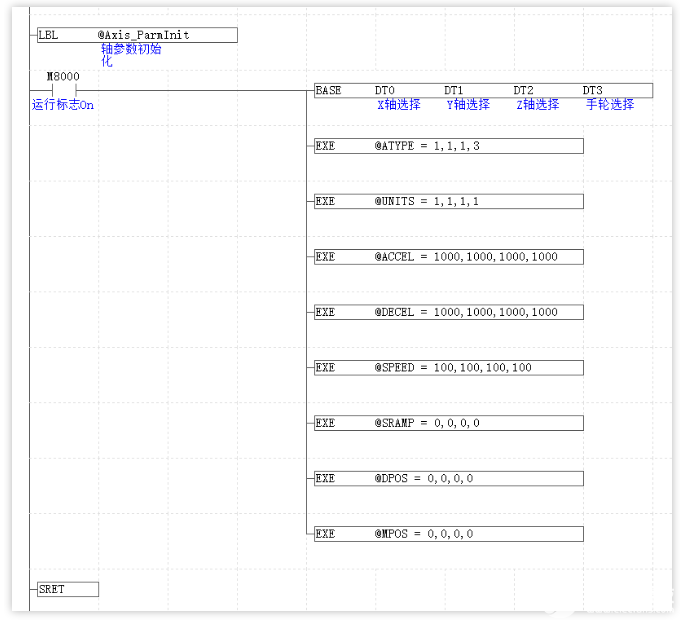
3.軸參數初始化
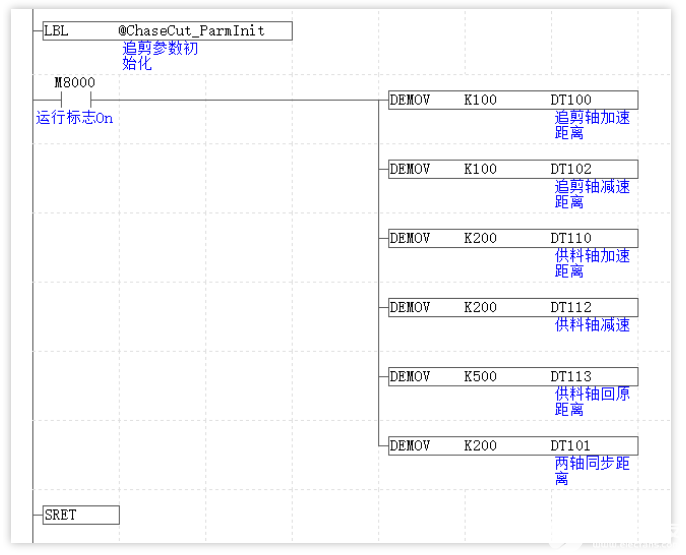
4.追剪參數初始化
5.追剪運動
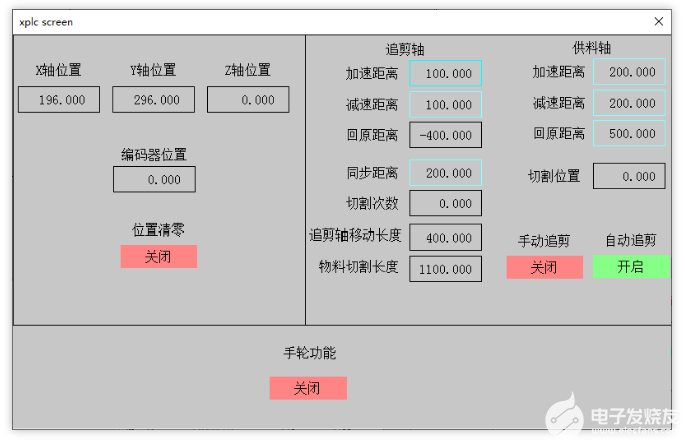
觸摸屏界面:可設置追剪加工參數,控制追剪的啟停,同時能顯示當前軸的位置信息。
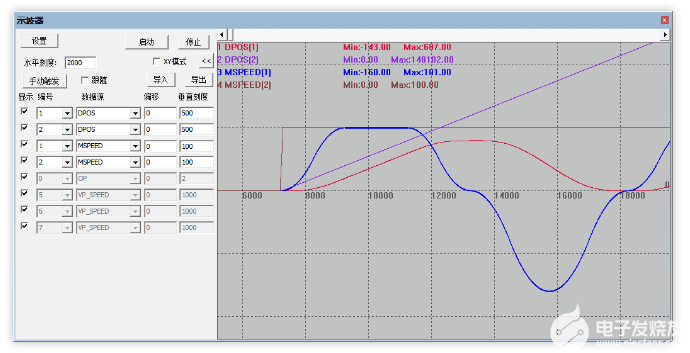
追剪波形如下,主軸為勻速運動的傳送帶,第一階段從軸(軸1)從初始位置跟隨主軸(軸2)加速運動,第二階段主從軸速度一致,達到同步,追剪刀具下剪后準備返回初始位置,第三階段從軸跟隨主軸減速到0,第四階段從軸反向回到初始位置,準備下一輪追剪。
本次,正運動技術經濟型EtherCAT運動控制器(三):PLC實現多軸直線插補與電子凸輪,就分享到這里。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
審核編輯:符乾江
-
控制器
+關注
關注
112文章
16361瀏覽量
178051 -
plc
+關注
關注
5011文章
13297瀏覽量
463343 -
運動控制
+關注
關注
4文章
581瀏覽量
32870
發布評論請先 登錄
相關推薦
脈沖全閉環EtherCAT運動控制器的固件升級



EtherCAT運動控制器與PLC的區別
EtherCAT PLC帶軸數的限制影響因素
發一個單片機SPI控制的50元起的4軸運動控制芯片

EtherCAT運動控制器在LabVIEW中的運動控制與實時數據采集

EtherCAT運動控制器在ROS上的應用開發案例(下)


【正運動】高速高精,超高實時性的PCIe EtherCAT實時運動控制卡 | PCIE464
凌華科技基于軟件控制的EtherCAT運動控制器






 工商網監
工商網監
評論