 如何利用超聲波傳感器制作一個輪式自平衡機器人
如何利用超聲波傳感器制作一個輪式自平衡機器人
這是一個輪式自平衡機器人。由 Arduino UNO 供電并由超聲波傳感器平衡,同時它能夠自我保持垂直平衡。
動力源

動力由兩個齒輪直流電機為機器人提供。
構建
第一步:將連接到齒輪直流電機


現在我們將輪子連接到電機的軸上。
第二步:準備 PVC T 型接頭

這是PVC管的T型接頭。我們將用它來固定電機,電線將從頂部的孔中出來。
第三步:通過 T 形接頭為電機接線
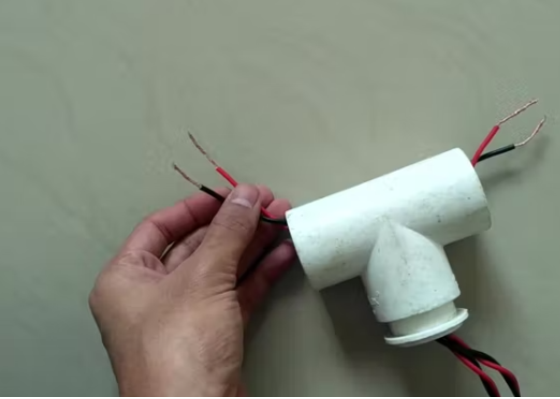
在將電機固定在該管道中之前,我們必須將它們接線。我們將從頂孔穿過 4 根電線。兩端分體,每臺電機2根線。
第四步:通過頂孔拉線

我們將從 T 型接頭拉回電線,以便電機就位。
第五步:將電機固定到位

現在我們已將電機固定在 T 形接頭中。
第六步:在頂孔中添加管道以安裝超聲波傳感器

我們在 T 形接頭的線端添加了一些管道,稍后我們將在其上安裝傳感器。
電路原理圖
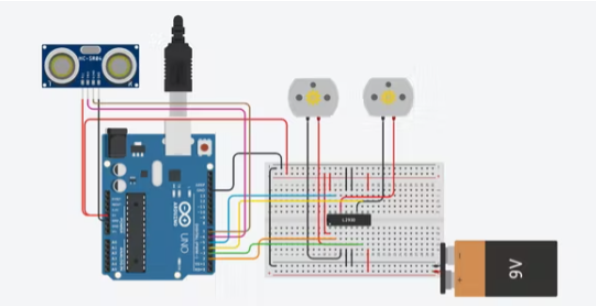
電路原理圖我們使用 L2938 H 橋電機驅動器 IC 來雙向旋轉電機。
自平衡機器人的概念

這個自平衡機器人的概念很簡單。我們有一個超聲波傳感器,它能夠測量機器人與前面障礙物的距離。
如果距離大于固定距離,則機器人將向前移動;如果距離小于固定距離,則機器人將向后移動避免摔倒。
使用 Arduino 為自平衡機器人連接超聲波傳感器

超聲波傳感器有 4 個引腳,分別是觸發、回波、電源和接地。4 根線從引腳連接到微控制器。
平衡機器人機體

現在,機器人垂直放置在地面上。看起來它是平衡的,因為它在通過不斷地移動以保持自身平衡。但與此同時,其實它也從我手里拿著的電線得到了一些支持。
它不斷地來回振蕩,這些振蕩需要被阻尼。因此,機器人將保持平衡并站立在一個點上而沒有任何移動。
可能遇到的問題與解決方案

如果它超出特定點,那么它將無法自行恢復。這些電機需要更多的功率才能快速響應。
在測試時,L293D 的第二個 H 橋被炸了。所以,我沒有機會通過 PID 來控制它。
為了真正做到平衡,我們可以使用 MPU-6050 慣性測量單元。相反,我們使用了這種便宜的超聲波傳感器。
自平衡機器人的CAD設計
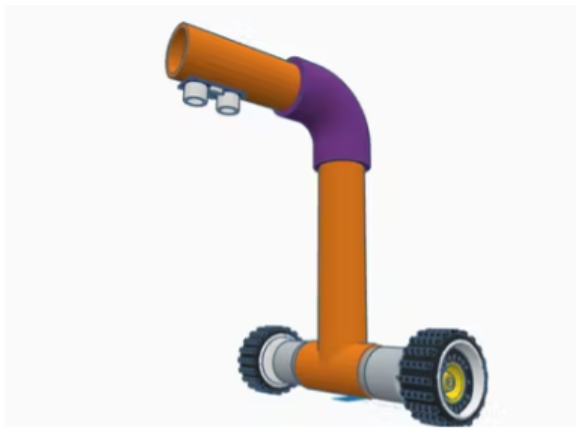
這是輪式自平衡機器人的 CAD 設計。在這里我們可以看到兩個電機,連接著兩個輪子。這些電機安裝在 PVC T 形接頭中。垂直 PVC 管連接到 T 形接頭,超聲波傳感器連接在管道上。
結論
不過好在項目的最后,我們還是設法使它平衡了一點。這個結果對我來說,還是挺滿意的,一切努力都沒有白費。
-
機器人
+關注
關注
211文章
28466瀏覽量
207330 -
超聲波傳感器
+關注
關注
18文章
583瀏覽量
35941 -
Arduino
+關注
關注
188文章
6471瀏覽量
187231
發布評論請先 登錄
相關推薦
基于超聲波傳感器的自主移動機器人的探測系統
轉:NANO—東半球最小的自平衡機器人(硬件+源碼+3D文件)
基于超聲波傳感器的自主移動機器人探測系統
超聲波傳感器在機器人避障中有什么作用
機器人超聲波傳感器MB7360的參數性能及應用分析
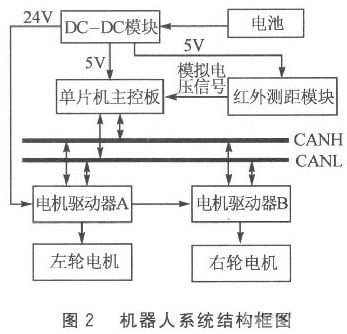
基于ATmage128單片機和紅外測距傳感器實現自平衡機器人系統的設計






 工商網監
工商網監
評論