 淺談超聲波傳感器技術難題
淺談超聲波傳感器技術難題
我們所熟悉的汽車上不論傳統發動機動力汽車還是今天混動活著新能源汽車,為了車輛正常運行,且提供各類輔助控制功能,都采用了各種各樣的傳感器。這些傳感器可能包括超聲波、激光雷達、攝像頭、紅外攝像頭等等,他們都被用于泊車輔助、自適應巡航ACC、車道輔助保持預警系統等很多高級駕駛輔助系統中。
這種輔助安全系統用的傳感器,某種程度上承擔了我們人類的眼睛、耳朵等等感知器官的作用。這幾年自動駕駛或者是自動輔助駕駛技術越來越成熟,且已經在泊車入位,自動泊車等情景下進入實用階段。
汽車傳感器安全的概念,其實早在人們開始構思設計自動駕駛的時候就已經作為考慮因素了。只是,這些信息,在售后維修領域,還沒有廣為人知,在這篇短文里,路工用自己所了解和掌握的一些信息和大家做一個分享,希望對看到這篇文章的人,在今后的一段時間的工作和學習中有所啟發。
這幾年酒駕的查處力度導致事故車的出險率明顯下降,很多原本依賴事故吃飯的維修企業遭遇了嚴重的業務滑坡,在一份中國人保總公司關于乘用車事故出險原因分析內部文件中,提到了乘用車泊車雷達遭受不明攻擊,進而導致車輛在個別地區出現明顯異常的特定地點泊車過程中出現的輕微事故。為什么會出現這種詭異情形呢?就要從今天和大家分享的這一個話題說起了。
用于倒車雷達(我們行業的大白話),專業術語叫做超聲波傳感器,它的工作原理就是超聲波傳感器探頭發送出去的超聲波信號和接收到的反射信號的時間差,利用這個時間差來計算出傳感器和物體之間的實際距離。
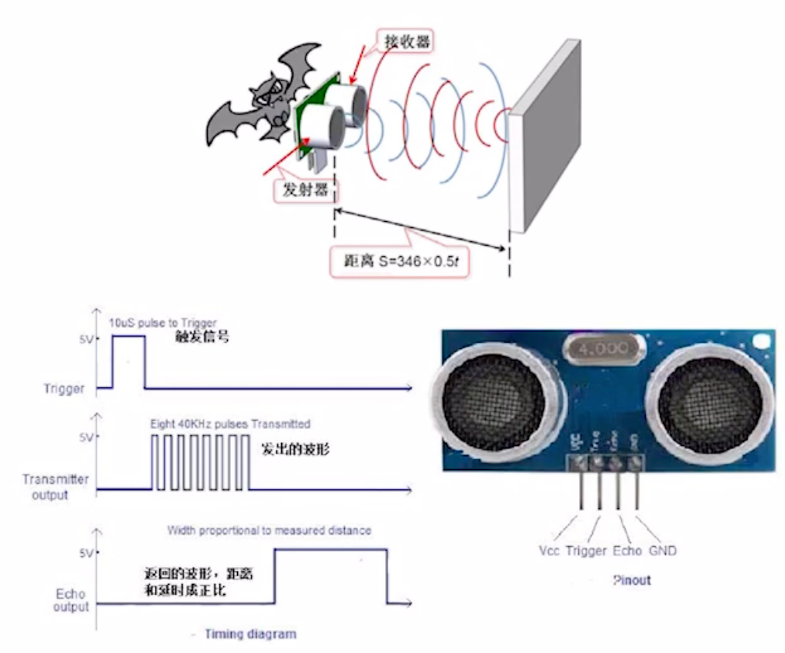
對于超聲波傳感器,如果有一個合適的干擾信號,那么它的工作將會受到影響,但是絕對不會報錯,也就是系統不會提示故障!
假設,事故的始作俑者想干擾超聲波傳感器,就可以通過不斷發射超聲波(和車輛超聲波探頭波形一致),來實現攻擊/干擾目的。如果需要進行信號偽裝,那么可以通過對特定車型型號超聲波傳感器的發射時間和周期等技術指標參數進行采樣,然后通過計算機軟件對超聲波發射裝置進行調制后,輸出針對特定車型特定型號的超聲波傳感器的偽裝攻擊。這種通過計算機計算出來的偽裝超聲波信號,不僅僅是信號形式和車上信號一致,還可以精確的計算出雷達可接受范圍內的任意特定距離,這一點就是干擾駕駛員產生誤判的重要原因。車上超聲波傳感器接收到了來自偽裝超聲波發射裝置的偽裝信號,車輛泊車電腦就會根據偽裝信號提供的距離信息對駕駛員發出虛假的被欺騙后的泊車警示距離,對于那些嚴重依賴泊車雷達的駕駛人員來說,這種情形下加上環境條件因素,在停車時候發生碰撞事故的概率就大大增加了。
大家也許會說,這么復雜的高精尖,哪里可以輕易搞到,其實這套東西并不復雜,而且是一套開源系統就能搞定的。用Arduino套件就可以搞定了。什么是Arduino?給大家百度結果如下圖:
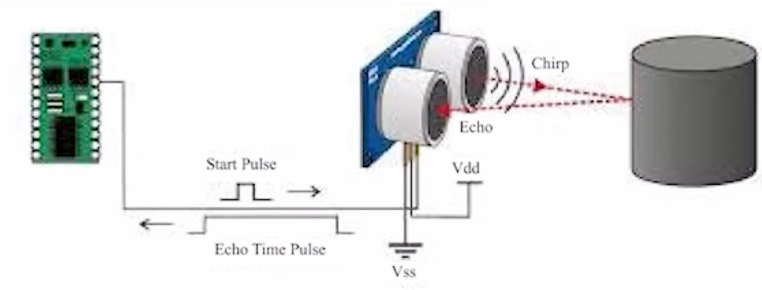
在事故維修領域,用到的基本都是通過這類原型?偽裝外殼驅動特定超聲波探頭來實現的,這在事故車領域,部分圈子里已經成為一條黑產供應鏈了,車系,品牌,各種技術參數,都根據市場實際需求而個性化定制,不斷完善升級。
附圖讓大家簡單了解這套偽裝攻擊設備的工作示意圖。
正所謂道高一尺魔高一丈,似乎在這樣情況下更為準確,在普通維修人員,駕駛員層面,這種技術層面的偽裝攻擊,想識破,還真的有一定的技術難度。
-
傳感器
+關注
關注
2552文章
51302瀏覽量
755246 -
超聲波傳感器
+關注
關注
18文章
584瀏覽量
35961
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論