 如何使用TDA2030實現步進電機控制器的設計
如何使用TDA2030實現步進電機控制器的設計
有多種版本的步進電機類型,也有多種版本的步進電機控制器設計。本電路是一款使用ICTDA2030作為驅動器的通用步進電機控制器。該電路可用于大約5V至18V的寬工作電壓范圍。它可以以等于電源電壓一半的峰值電壓驅動電機,因此它可以輕松處理為2.5V之間的電壓設計的步進電機和9V。
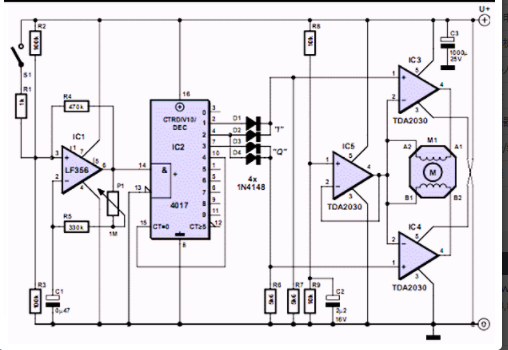
這意味著它可以用于驅動相對較大的電機。該電路還具有短路保護功能,并具有內置的過溫保護功能。驅動步進電機需要兩個信號。從邏輯上講,它們構成了格雷碼,也就是說它們是兩個頻率相同但相位差恒定為90度的方波信號。
IC1產生一個方波信號,其頻率可以使用電位計P1進行設置。該頻率決定了步進電機的轉速。格雷碼由4017形式的十進制計數器生成。計數器的輸出Q0~Q9響應時鐘信號的上升沿連續變高。格雷碼可以通過使用兩個OR門從輸出生成,這里使用兩個二極管和一個電阻器形成每個門,以產生I和Q信號。
這里的“I”代表“同相”,“Q”代表“正交”,這意味著它與I信號有90度的相位偏移。通常的做法是驅動步進電機的繞組,每個繞組使用一對推挽電路,稱為“H橋”。這使得可以反轉通過每個繞組的電流方向,這對于雙極電機(其繞組沒有中心抽頭)的正常運行是必要的。
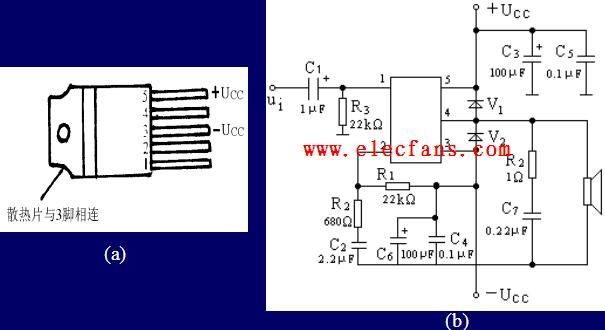
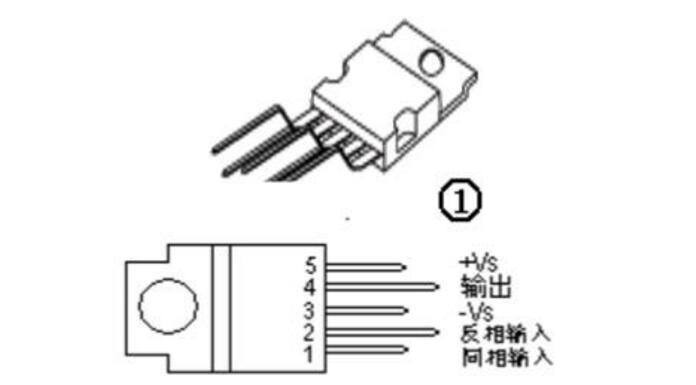
當然,它也可以用來正確驅動單極電機(帶有中心抽頭繞組)。在這里,我們決定使用音頻放大器IC(TDA2030型),而不是使用這種推挽電路,盡管這聽起來有點奇怪。從功能上講,TDA2030實際上是一種功率運算放大器。它在輸入端有一個差分放大器,在輸出端有一個推挽驅動級。
IC3、IC4和IC5都是這種類型(價格經濟)。這里IC3和IC4作為比較器接線。它們的非反相輸入由前面提到的I和Q信號驅動,反相輸入設置為等于電源電壓一半的電位。該潛力由第三個TDA2030提供。因此,IC3和IC4的輸出跟蹤它們的非反相輸入,并且它們中的每一個都驅動一個電機繞組。
繞組的另一端依次連接到由IC5提供的一半電源電壓。由于每個繞組的一端連接到在0V和接近電源電壓的電位之間交替的方波信號,而另一端處于電源電壓的一半,因此始終施加等于電源電壓一半的電壓到每個繞組,但它的極性會根據I和Q信號的狀態交替變化。
這正是我們想要驅動雙極步進電機的原因。使用電位計P1可以改變轉速,但每種電機的實際速度不同,因為它取決于每轉的步數。原型中使用的電機提前了大約9?每步,其速度可以在每轉大約2到10秒的范圍內進行調整。
原則上可以通過調節C1的值來獲得任何所需的速度,只要電機可以處理即可。通過減小電阻R5的阻值可以增加P1的調節范圍。調整范圍為1:(1000+R5)/R5,其中R5以k為單位。如果通過從電路中移除電源電壓來關閉步進電機,則電機可能會繼續轉動一定量由于其自身的慣性或電機上的機械負載(飛輪效應)。
當電路首次通電時,電機的位置也可能與I和Q信號的狀態不一致。因此,電機在啟動時有時會“混淆”,結果是在開始沿驅動信號定義的方向移動之前,它會朝錯誤的方向邁出一步。這些影響可以通過添加可選開關S1和1-k電阻器來避免,然后可用于啟動和停止電機。當S1閉合時,時鐘信號停止,但IC2在那一刻保持其輸出電平,因此通過電機繞組的連續電流將轉子磁“鎖定”到位。
TDA2030具有內部過溫保護,因此如果IC過熱,輸出電流會自動降低。因此,在使用功率相對較大的電機時,建議將IC3、IC4和IC5安裝到散熱器(可能是共用散熱器)上。TO220外殼的接線片與負電源電壓引腳電連接,因此IC可以連接到共享散熱器,而無需使用絕緣墊圈
-
步進電機
+關注
關注
150文章
3110瀏覽量
147484 -
電機控制器
+關注
關注
20文章
525瀏覽量
32063
發布評論請先 登錄
相關推薦
TDA2030功放IC的多種應用電路
求元件TDA2030封裝或包含TDA2030的庫下載,急用!
tda2030中文資料匯總(tda2030引腳圖及功能_內部電路及應用電路)





 工商網監
工商網監
評論