 執行部署的TensorRT加速引擎
執行部署的TensorRT加速引擎
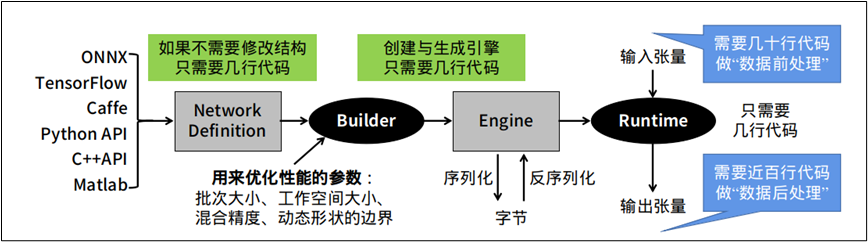
很多開發人員在轉換完 TensorRT 加速引擎之后,最后準備調用起來執行推理任務的時候,就遇到一些障礙。這個環節是需要開發人員自行撰寫相關代碼,去執行讀入數據(前處理)、執行推理、顯示結果(后處理)等工作,如下圖最右邊的部分。
這部分的麻煩之處,在于每個神經網絡的結構不相同,并沒有“通用”的代碼可以適用于大部分的網絡結構,需要針對指定神經網絡去撰寫對應的代碼,最重要是需要清除這個模型的輸入 (input bold) 與輸出 (outpold) 的名稱與張量結構。
本文以前面在 TAO 工具套件中使用的 ssd 神經網絡為范例,提供基礎的“前后處理”范例代碼給讀者參考,這是從 NVIDIA 中國區開發者社區所舉辦過多屆 “Sky 黑客松”比賽中,所提供的開源內容中提取的重點,主要如下:
1、數據前處理:
def _preprocess_trt(img, shape=(300, 300)):"""TRT SSD推理前的數據前處理"""img = cv2.resize(img, shape)img = img.transpose((2, 0, 1)).astype(np.float32)returnimg
這里 “shape=(300,300)” 為張量的尺度,根據模型訓練時的長寬兩個變量,至于 transpose 里的 (2,0,1) 是固定的,不需調整。
2、數據后處理:
def _postprocess_trt(img, output, conf_th, output_layout):"""TRT SSD推理后的結果的數據處理步驟."""img_h, img_w, _ = img.shapeboxes, confs, clss = [], [], []for prefix in range(0, len(output), output_layout):index = int(output[prefix+0])conf = float(output[prefix+2])if conf < conf_th:continuex1 = int(output[prefix+3] * img_w)y1 = int(output[prefix+4] * img_h)x2 = int(output[prefix+5] * img_w)y2 = int(output[prefix+6] * img_h)cls = int(output[prefix+1])boxes.append((x1, y1, x2, y2))confs.append(conf)clss.append(cls)returnboxes,confs,clss#返回標框坐標、置信度、類別
這里最重要的 x1, y1,x2, y2 坐標值,必須根據 SSD 神經網絡所定義的規范去進行修改,其他部分可以通用于大部分神經網絡。
3、定義 TrtSSD 類封裝運行 TRT SSD 所需的東西:
class TrtSSD(object):# 加載自定義組建,如果TRT版本小于7.0需要額外生成flattenconcat自定義組件庫def _load_plugins(self):if trt.__version__[0] < '7':ctypes.CDLL("ssd/libflattenconcat.so")trt.init_libnvinfer_plugins(self.trt_logger, '')#加載通過Transfer Learning Toolkit生成的推理引擎def _load_engine(self):TRTbin = 'ssd/TRT_%s.bin' % self.model #請根據實際狀況自行修改with open(TRTbin, 'rb') as f, trt.Runtime(self.trt_logger) as runtime:return runtime.deserialize_cuda_engine(f.read())#通過加載的引擎,生成可執行的上下文def _create_context(self):for binding in self.engine:size = trt.volume(self.engine.get_binding_shape(binding)) *self.engine.max_batch_size##注意:這里的host_mem需要使用pagelockedmemory,以免內存被釋放host_mem = cuda.pagelocked_empty(size, np.float32)cuda_mem = cuda.mem_alloc(host_mem.nbytes)self.bindings.append(int(cuda_mem))if self.engine.binding_is_input(binding):self.host_inputs.append(host_mem)self.cuda_inputs.append(cuda_mem)else:self.host_outputs.append(host_mem)self.cuda_outputs.append(cuda_mem)return self.engine.create_execution_context()# 初始化引擎def __init__(self, model, input_shape, output_layout=7):self.model = modelself.input_shape = input_shapeself.output_layout = output_layoutself.trt_logger = trt.Logger(trt.Logger.INFO)self._load_plugins()self.engine = self._load_engine()self.host_inputs = []self.cuda_inputs = []self.host_outputs = []self.cuda_outputs = []self.bindings = []self.stream = cuda.Stream()self.context = self._create_context()# 釋放引擎,釋放GPU顯存,釋放CUDA流def __del__(self):del self.streamdel self.cuda_outputsdel self.cuda_inputs# 利用生成的可執行上下文執行推理def detect(self, img, conf_th=0.3):img_resized = _preprocess_trt(img, self.input_shape)np.copyto(self.host_inputs[0], img_resized.ravel())# 將處理好的圖片從CPU內存中復制到GPU顯存cuda.memcpy_htod_async(self.cuda_inputs[0], self.host_inputs[0], self.stream)# 開始執行推理任務self.context.execute_async(batch_size=1,bindings=self.bindings,stream_handle=self.stream.handle)# 將推理結果輸出從GPU顯存復制到CPU內存cuda.memcpy_dtoh_async(self.host_outputs[1], self.cuda_outputs[1], self.stream)cuda.memcpy_dtoh_async(self.host_outputs[0], self.cuda_outputs[0], self.stream)self.stream.synchronize()output = self.host_outputs[0]return_postprocess_trt(img,output,conf_th,self.output_layout)
上面三個部分對不同神經網絡都是不同的內容,如果要參考 YOLO 神經網絡的對應內容,推薦參考https://github.com/jkjung-avt/tensorrt_demos開源項目,里面有完整的 YOLOv3 與 YOLOv4 的詳細內容。
本文的開源代碼可以在此鏈接下載完整的內容與配套的工具。
https://pan.baidu.com/s/1fGLBnzqtnRNpfD3PbileOA密碼: 99et
審核編輯 :李倩
-
神經網絡
+關注
關注
42文章
4774瀏覽量
100912 -
NVIDIA
+關注
關注
14文章
5025瀏覽量
103270
原文標題:NVIDIA Jetson Nano 2GB 系列文章(65):執行部署的 TensorRT 加速引擎
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達企業解決方案】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
常見的容器云服務引擎有哪些?
NVIDIA TensorRT-LLM Roadmap現已在GitHub上公開發布

IBM將在云平臺部署AMD加速器
TensorRT-LLM低精度推理優化

IPv6 大規模部署,開啟網絡新時代的強勁引擎

容器云服務引擎是什么意思?
容器云服務引擎是什么?如何使用
魔搭社區借助NVIDIA TensorRT-LLM提升LLM推理效率
大模型端側部署加速,都有哪些芯片可支持?
鴻蒙實戰開發-本地部署、SmartPerf 編譯部署指導文檔
NVIDIA加速微軟最新的Phi-3 Mini開源語言模型
簡單兩步使用OpenVINO?搞定Qwen2的量化與部署任務

簡單三步使用OpenVINO?搞定ChatGLM3的本地部署







 工商網監
工商網監
評論