") 關(guān)于逆變電機驅(qū)動電源模塊的優(yōu)化方案
關(guān)于逆變電機驅(qū)動電源模塊的優(yōu)化方案
電動機被用來驅(qū)動各種各樣的負載--空調(diào)系統(tǒng)中使用的風(fēng)扇,提供淡水的水泵,以及工廠中用于驅(qū)動制造設(shè)備的馬達只是幾個例子。傳統(tǒng)上,這些電動機直接連接到電網(wǎng)的電源上。由于電網(wǎng)的工作頻率是固定的,電機以恒定的速度運行,沒有直接控制轉(zhuǎn)矩。當(dāng)今的電機驅(qū)動采用變頻調(diào)速,控制電機的轉(zhuǎn)速和轉(zhuǎn)矩。
使用變頻器的第一個好處是在全速運行時提高效率,因為逆變器可以通過給定的勵磁電流最大化扭矩。變頻的第二個好處是進一步節(jié)省能源。在傳統(tǒng)的驅(qū)動方式下,馬達要么關(guān)了,要么完全開著(想象一下,當(dāng)你只允許油門踏板完全放下,或者把你的腳完全脫離下來的時候,你就可以駕駛一輛汽車)。允許電機以不同的速度運行,就可以節(jié)省能源,并允許更平滑的開啟和關(guān)閉。
智能功率模塊(IPM)是變速驅(qū)動的一種使能技術(shù),它將逆變器和內(nèi)部驅(qū)動器包含在一個模塊中。它們是單相交流輸入應(yīng)用的首選模塊。用于這些模塊的轉(zhuǎn)移模塑制造方法具有極好的魯棒性以及功率循環(huán)和溫度循環(huán)能力。這些模塊可能包含功率因數(shù)校正(PFC)級,但它們通常不包含輸入整流級。單相交流橋式整流器組件的現(xiàn)成可用性意味著這不是一個問題。使用IPMs的主要好處是集成了驅(qū)動程序—為驅(qū)動程序添加了額外的引腳。
對于三相交流輸入應(yīng)用,IPMS變得非常大,這是由于漏電和間隙的要求,以確定最小間距之間的傳導(dǎo)部件,以停止電弧或跟蹤。由于IPMS為驅(qū)動程序提供了額外的引腳,因此最小間距要求使IPM大于沒有驅(qū)動程序的模塊。每個應(yīng)用程序都必須仔細計算漏電和間隙間隔,這些因素包括驅(qū)動器的最大工作高度、系統(tǒng)中的有效電壓、系統(tǒng)中使用的隔離度、模塊和印刷電路板的污染程度和比較跟蹤指數(shù)(CTI)。
圖1顯示了一個不帶集成門驅(qū)動的三相交流輸入模塊的原理圖,我們將根據(jù)涵蓋大多數(shù)三相交流輸入電機驅(qū)動器的通用計算來審查所需的間距。
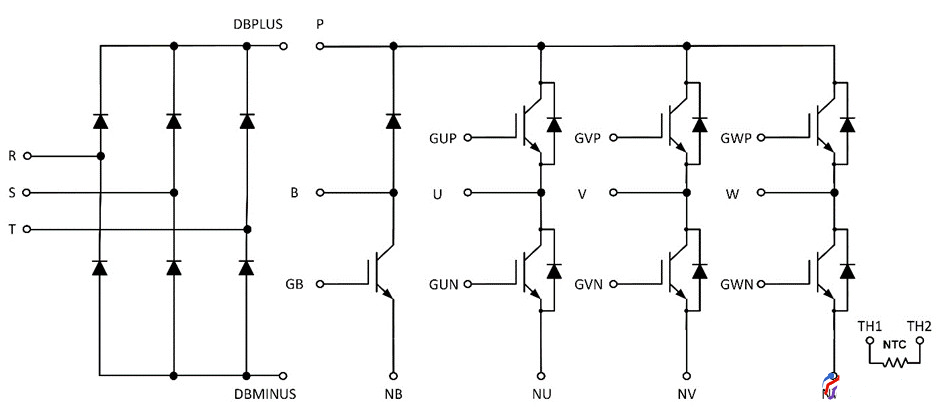
圖1:三相交流輸入變換器逆變制動器(CIB)模塊原理圖
NTC終端與任何其他終端之間的距離必須至少為5.5毫米。這個距離包括引腳外部邊緣之間的距離。但是,如果引腳是焊接的,或插入焊盤中,相關(guān)距離是在每個焊盤的外部距離之間。孔尺寸的寬公差和環(huán)形墊的寬度有助于提高可制造性,但會減少漏電和間隙距離。
在R,S,T,DBMINUS和DBPLUS引腳和任何其他引腳之間需要5mm的間隙距離。U,V,W之間的所需距離更多地取決于應(yīng)用,這里的最小值通常為2.5mm到3mm。
加上所有這些間隙距離,過孔公差和環(huán)形環(huán)(焊盤)的大小,結(jié)果是一個相當(dāng)大的模塊-最小大約70毫米。如果在IPM上增加高側(cè)控制所需的附加信號,則模塊的最小大小將變得更大,使得它太大,太昂貴,不適合于低功率三相輸入應(yīng)用。
對于低功耗的工業(yè)三相交流輸入應(yīng)用,IPM模塊和凝膠填充模塊都得到了廣泛的應(yīng)用:IPM模塊沒有整流器,凝膠填充模塊沒有驅(qū)動器。凝膠填充模塊有一個引腳矩陣,而IPMS通常位于雙在線封裝中。凝膠填充模塊具有較低的熱循環(huán)能力,但新的制造方法大大提高了它們的功率循環(huán)能力。當(dāng)使用凝膠填充模塊時,PCB布局的靈活性要小于采用DIP安裝的IPMS,因為來自凝膠填充模塊引腳矩陣的引腳往往會阻礙PCB的布線。
由于機器人焊接設(shè)備的廣泛應(yīng)用,新設(shè)計的趨勢是在凝膠填充和IPM模塊中使用焊接引腳。某些類型的壓接引腳易受腐蝕性環(huán)境的影響,但在焊接引腳應(yīng)用中未發(fā)現(xiàn)此問題。。
圖2顯示了ON半導(dǎo)體新的TMPIM(傳輸模制PIM)模塊的橫截面。制造過程的第一部分類似于凝膠填充模塊。模具和熱敏電阻被焊接在DBC上,然后進行線連接。在IPM模塊中,DBC和一些部件在leadframe上進行焊接。這會降低工具的靈活性,并且需要額外的工具。相比之下,只要引腳不改變,TMPIM在DBC的模具布局和結(jié)構(gòu)是完全靈活。
下一個階段是將leadframe焊接到DBC上。最后一個階段是模組封裝在環(huán)氧樹脂中的傳遞成型過程。引線Bond wire被切割,然后彎曲成形狀,在一個被稱為修剪和成型的過程中。
這種方法比將芯片焊接到引線框架leadframe上的模塊的優(yōu)點是,很容易更改模塊中的配置或芯片。不同的引腳需要一個新的leadframe和修剪成型工具。由于該工具的成本高達數(shù)十萬美元,因此該方法用于帶有標(biāo)準(zhǔn)引腳的模塊,如六個組件、變頻器-逆變器-制動器(CIB)模塊(圖1)和帶有交錯PFC的六個組件。
凝膠填充模塊更靈活,以改變定制的方式,但沒有相同的熱循環(huán)能力的轉(zhuǎn)移模制模塊。對于同樣的dbc焊接和線鍵連接方式,轉(zhuǎn)移模塑模塊將比凝膠填充模塊有更好的功率循環(huán)能力。
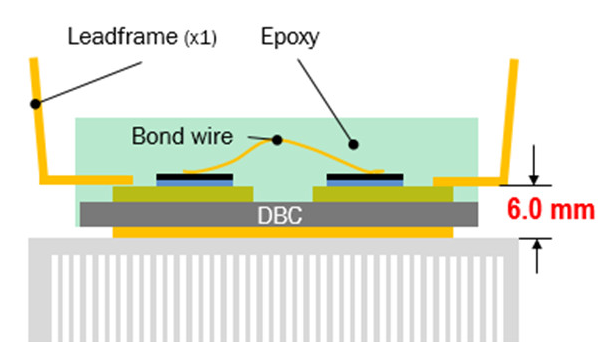
圖2:新TMPIM(轉(zhuǎn)移模塑PIM)模塊的橫截面。
圖2顯示了TMPIM相對于現(xiàn)有模塊的一個明顯優(yōu)勢。為了便于說明,這個比例尺被拉伸了。模塊總厚度為8mm。銷頂部和散熱器頂部之間的間隙為6mm,大于所需的5.5mm間隙。凝膠填充模塊也滿足這一要求,但它們厚得多(12毫米,而TMPIM為8毫米);IPM模塊更薄。因此,機械設(shè)計師需要塑造散熱器,這通常會增加額外的制造成本。
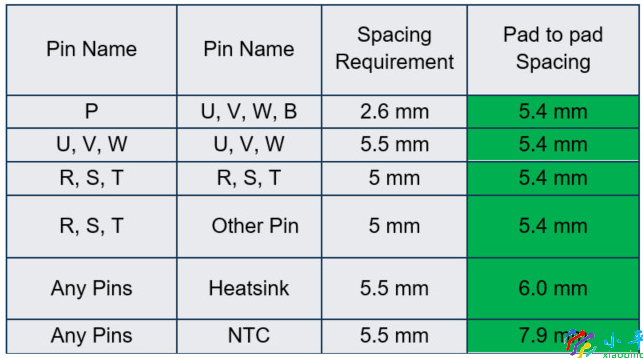
表1顯示了在考慮0.5mm焊盤環(huán)寬度、0.3mm鉆孔公差和引腳尺寸后,焊盤邊緣之間的間距。在設(shè)計TMPIM產(chǎn)品時,廣泛考慮了間距要求。
Table 1: Pad to pad spacing for TMPIM DIP-C2 CIB module
表1:TMPIMDIP-C2 CIB模塊的襯墊間距
在TMPIM中使用的IGBT是魯棒場阻II 1200 V IGBT,在150℃、900 V母線電壓和15V柵極驅(qū)動下,短路額定值超過10 s。在發(fā)布之前,這些模塊在電機驅(qū)動測試中進行了廣泛的測試,包括臺架測試。NCP 57000隔離門驅(qū)動器來自O(shè)N半導(dǎo)體是理想的驅(qū)動TMPIM。每個TMPIM使用6個隔離驅(qū)動程序。NCP 57000具有Desat功能,它檢測過載電流,然后執(zhí)行IGBT的軟關(guān)閉,以防止過高的電壓尖峰在短路條件下過快關(guān)閉。
TMPIM系列可實現(xiàn)1000多次熱循環(huán)。沒有任何散熱器的標(biāo)準(zhǔn)凝膠填充模塊通常只能實現(xiàn)200次熱循環(huán)。模塊的功率循環(huán)曲線顯示出良好的功率循環(huán)能力,取決于結(jié)溫的變化。對于TMPIM中的高功率模塊,使用高性能氧化鋁基板。當(dāng)讀取功率循環(huán)曲線時,較低的熱阻導(dǎo)致熱變化減少,從而導(dǎo)致較高的功率循環(huán)能力。
在半導(dǎo)體目前的TMPIM系列包括1200 V的CIB模塊,額定為25A,35A,35A的高性能襯底和50A的高性能襯底。該系列的新設(shè)計將包括650V CIB模塊,650V 6包,1200V 6 包和650V模塊,交錯的PFC和6包。
總之,TMPIM系列所采用的方法可以將傳遞模塑模塊的使用擴展到更高的功率水平,同時也為工業(yè)電機驅(qū)動逆變器的設(shè)計者提供了方便、緊湊、可靠的解決方案。
-
機器人
+關(guān)注
關(guān)注
211文章
28578瀏覽量
207799 -
變頻器
+關(guān)注
關(guān)注
251文章
6574瀏覽量
145424 -
電動機
+關(guān)注
關(guān)注
75文章
4121瀏覽量
96763
發(fā)布評論請先 登錄
相關(guān)推薦
關(guān)于逆變電路
電源模塊提高DAQ性能的方法
PCB布局技術(shù)使電源模塊性能最優(yōu)化

DC電源模塊方案設(shè)計

直流充電樁電源模塊磁性器件優(yōu)化
關(guān)于DC電源模塊的噪音問題

三相逆變電路驅(qū)動電機原理
DCDC電源模塊在光伏逆變中的應(yīng)用
DC電源模塊的能效優(yōu)化探索與應(yīng)用

DC電源模塊的能效優(yōu)化探索與應(yīng)用
AC/DC電源模塊的設(shè)計與優(yōu)化






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論