

智能化和自動化是未來機(jī)器發(fā)展的一大趨勢。機(jī)器要自主感知周邊環(huán)境并與之交互,離不開各種三維傳感器。
激光雷達(dá)利用光波進(jìn)行三維測量,可以實(shí)現(xiàn)較高的分辨率,相比其它三維傳感器具有獨(dú)特的優(yōu)勢,因此也在無人駕駛汽車、機(jī)器人、無人機(jī)、消費(fèi)電子產(chǎn)品等領(lǐng)域得到了廣泛的應(yīng)用。
激光雷達(dá)的技術(shù)方案多種多樣,但目前中長距離的激光雷達(dá)大部分使用掃描光束的方案,即發(fā)出一束或幾束準(zhǔn)直激光,每次測量到物體上一個或幾個點(diǎn)的距離,再依次改變發(fā)出光的方向掃描整個視場。
傳統(tǒng)激光雷達(dá)一般使用機(jī)械旋轉(zhuǎn)的方式進(jìn)行光束掃描,這使得大部分激光雷達(dá)產(chǎn)品仍有體積大、成本高等不足。小型化和集成化是激光雷達(dá)的發(fā)展方向,如果能在芯片上實(shí)現(xiàn)固態(tài)激光雷達(dá),將極大地降低激光雷達(dá)的功耗和成本,提高可靠性。
光束掃描器件的集成化是其中的一大技術(shù)難點(diǎn)。學(xué)界和業(yè)界近年來主要提出了兩種集成光束掃描方案,即光學(xué)相控陣和焦平面開關(guān)陣列。
焦平面開關(guān)陣列具有控制簡單,可擴(kuò)展性強(qiáng),容易實(shí)現(xiàn)二維陣列等優(yōu)勢。受限于干涉式硅光開關(guān)的功耗和尺寸,已有文獻(xiàn)報道中最大的焦平面開關(guān)陣列像素數(shù)僅為 512,與實(shí)用激光雷達(dá)的像素數(shù)要求有很大差距。
近日,加州大學(xué)伯克利分校 吳明強(qiáng) 教授課題組利用獨(dú)特的微機(jī)電系統(tǒng)光開關(guān),實(shí)現(xiàn)了 16384 像素的大規(guī)模焦平面開關(guān)陣列,并展示了該芯片作為光束掃描器件實(shí)現(xiàn)的激光雷達(dá)。
值得一提的是,英特爾于2021年12月宣布成立集成光子學(xué)研究中心,匯集了世界知名的光子學(xué)和電路的研究人員,其目標(biāo)是為下一個十年的計算互連鋪平道路。吳教授是參與該研究中心的 7 名研究人員之一。
該團(tuán)隊在 1 cm2 的硅光芯片上集成了 128x128 個微機(jī)電系統(tǒng)光開關(guān)和天線陣列,可將激光雷達(dá)光束在 70°x70° 的范圍內(nèi) 16384 個不同方向之間快速掃描切換。
該成果以 A large-scale microelectromechanicalsystems-based silicon photonics LiDAR 為題發(fā)表在 Nature。加州大學(xué)伯克利分校的 張曉聲 博士和 權(quán)暻睦 博士為論文的共同第一作者。
值得一提的是,張曉聲 博士曾經(jīng)是2016年清華本科生特獎得主(清華大學(xué)本科生的最高榮譽(yù))。
焦平面開關(guān)陣列及其優(yōu)勢
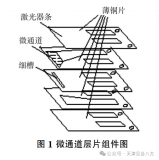
該團(tuán)隊設(shè)計的焦平面開關(guān)陣列原理如圖1所示,他們在硅光芯片上集成了一個二維光柵天線陣列,其中每個天線都通過光開關(guān)和光波導(dǎo)與輸入端口連接。打開對應(yīng)的光開關(guān),可以控制輸入芯片的光傳導(dǎo)到某個指定的光柵天線并從該天線發(fā)出。利用類似照相機(jī)的光學(xué)原理,將這個硅光芯片放置在一個凸透鏡的焦平面上,從不同位置天線發(fā)出的光經(jīng)過透鏡后會被轉(zhuǎn)換為傳向不同方向的準(zhǔn)直光束,從而實(shí)現(xiàn)光束掃描。
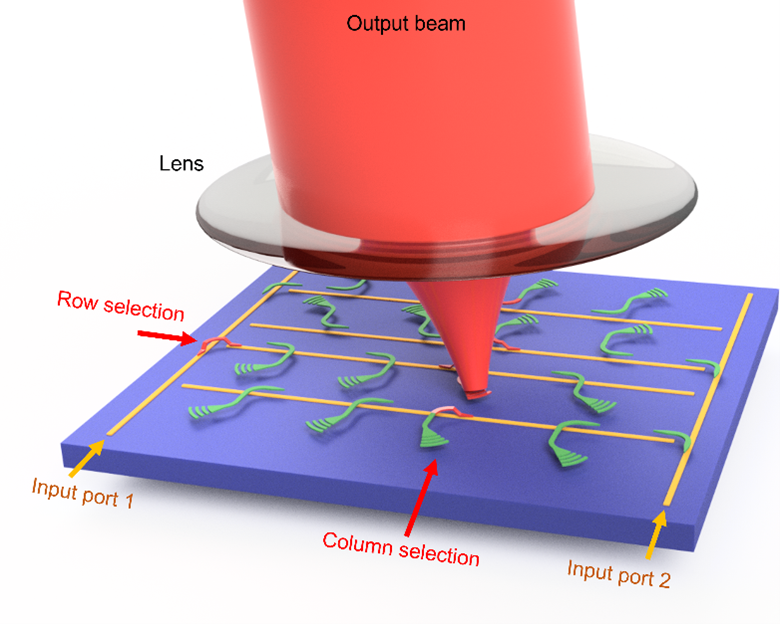
圖1 焦平面開關(guān)陣列原理示意圖
圖源:張曉聲,加州大學(xué)伯克利分校
焦平面開關(guān)陣列中的光開關(guān)僅需要數(shù)字化的開關(guān)控制,不需要復(fù)雜的模擬控制信號,并且二維陣列可以通過行列尋址方式減少控制信號數(shù)目,因此具有很好的可擴(kuò)展性,便于實(shí)現(xiàn)大規(guī)模陣列。對于同一個陣列芯片,使用不同焦距和孔徑的透鏡(類似相機(jī)更換鏡頭),可以靈活改變光束掃描的范圍、分辨率等參數(shù)以適應(yīng)不同的應(yīng)用場景。
微機(jī)電系統(tǒng)光開關(guān)
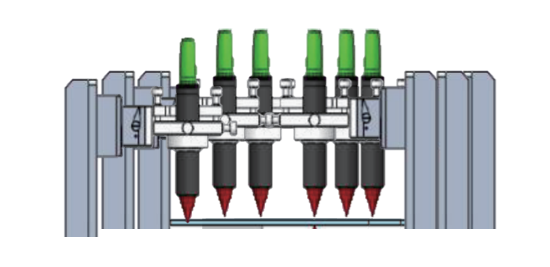
該陣列中使用的微機(jī)電系統(tǒng)光開關(guān)工作原理如圖2所示。每個光柵天線的輸入端口(圖中綠色)由一個微機(jī)電系統(tǒng)致動器控制,可以在上下兩個位置間切換。在開關(guān)關(guān)斷狀態(tài),光柵天線輸入端口處于上層位置,遠(yuǎn)離在硅片上的波導(dǎo)(圖中黃色),不影響波導(dǎo)中光的傳播。當(dāng)開關(guān)處于打開狀態(tài),光柵天線輸入端口處于下層位置,靠近硅片上的波導(dǎo),這時在波導(dǎo)中傳播的光就會被耦合到光柵天線中。這種微機(jī)電系統(tǒng)光開關(guān)具有面積小、損耗低、開關(guān)速度快等優(yōu)勢,特別適用于大規(guī)模陣列。
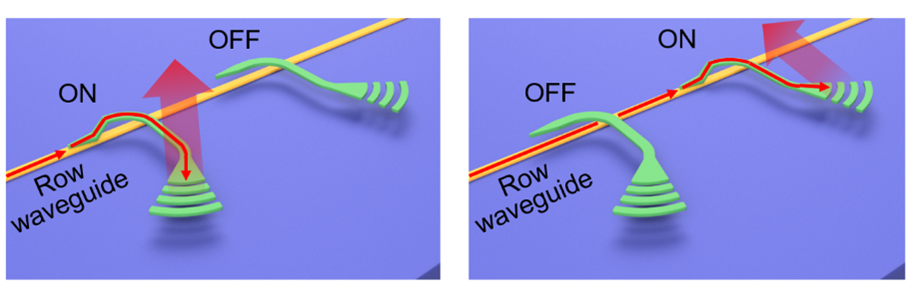
圖2 微機(jī)電系統(tǒng)光開關(guān)工作原理
圖源:張曉聲,加州大學(xué)伯克利分校
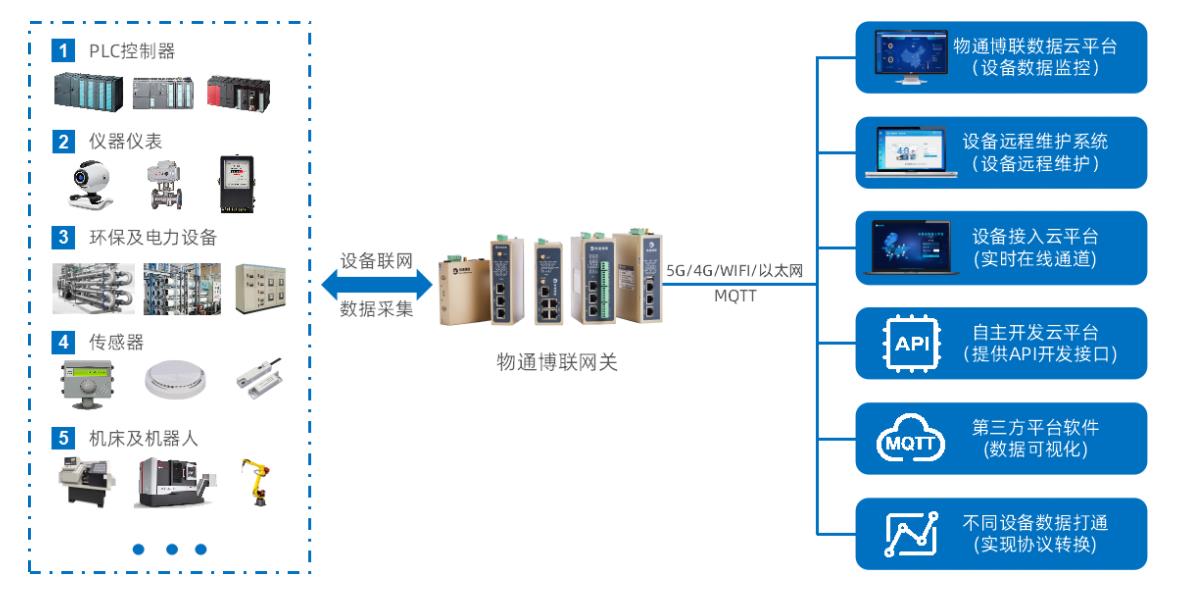
該團(tuán)隊設(shè)計加工的 128x128 焦平面開關(guān)陣列如圖3所示。其使用的微納加工工藝與現(xiàn)有 CMOS 工藝兼容,可以實(shí)現(xiàn)大規(guī)模量產(chǎn)。
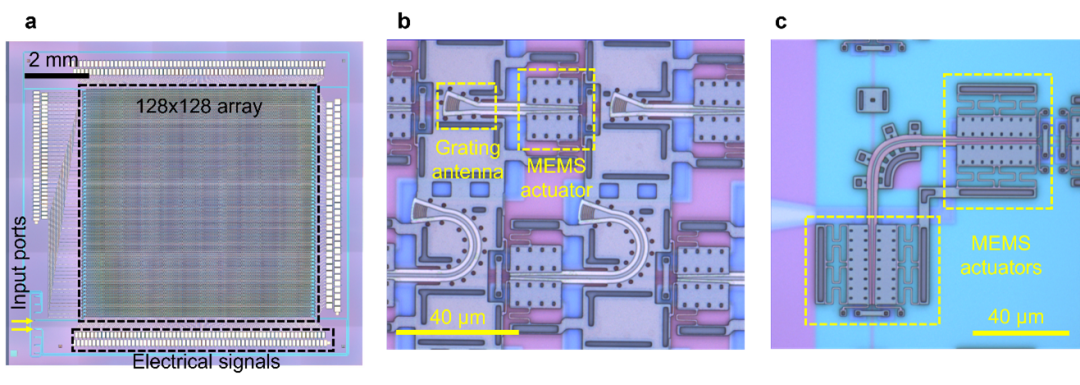
圖3 128x128焦平面開關(guān)陣列的顯微鏡照片(a),及光柵天線和微機(jī)電系統(tǒng)光開關(guān)的放大照片(b, c)
圖源:張曉聲,加州大學(xué)伯克利分校
大規(guī)模固態(tài)激光雷達(dá)
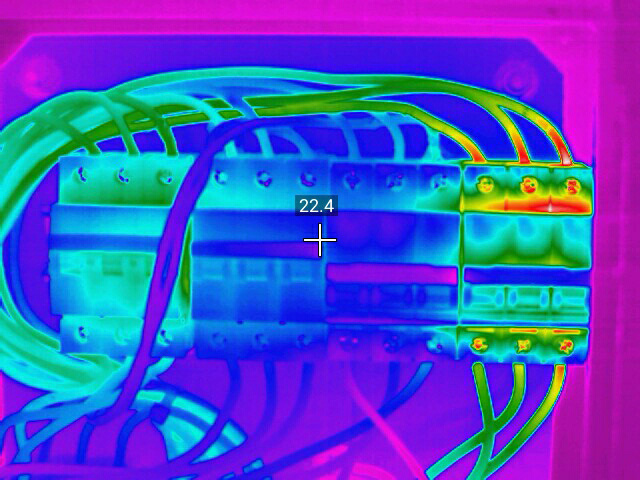
論文作者將 128x128 焦平面開關(guān)陣列與調(diào)頻連續(xù)波測距系統(tǒng)結(jié)合,演示了一個激光雷達(dá)系統(tǒng),在實(shí)驗中驗證了 10 米測距范圍的三維成像,測得的三維點(diǎn)云如圖4所示。實(shí)驗中得到的光束掃描范圍和測量分辨率與設(shè)計值相符。
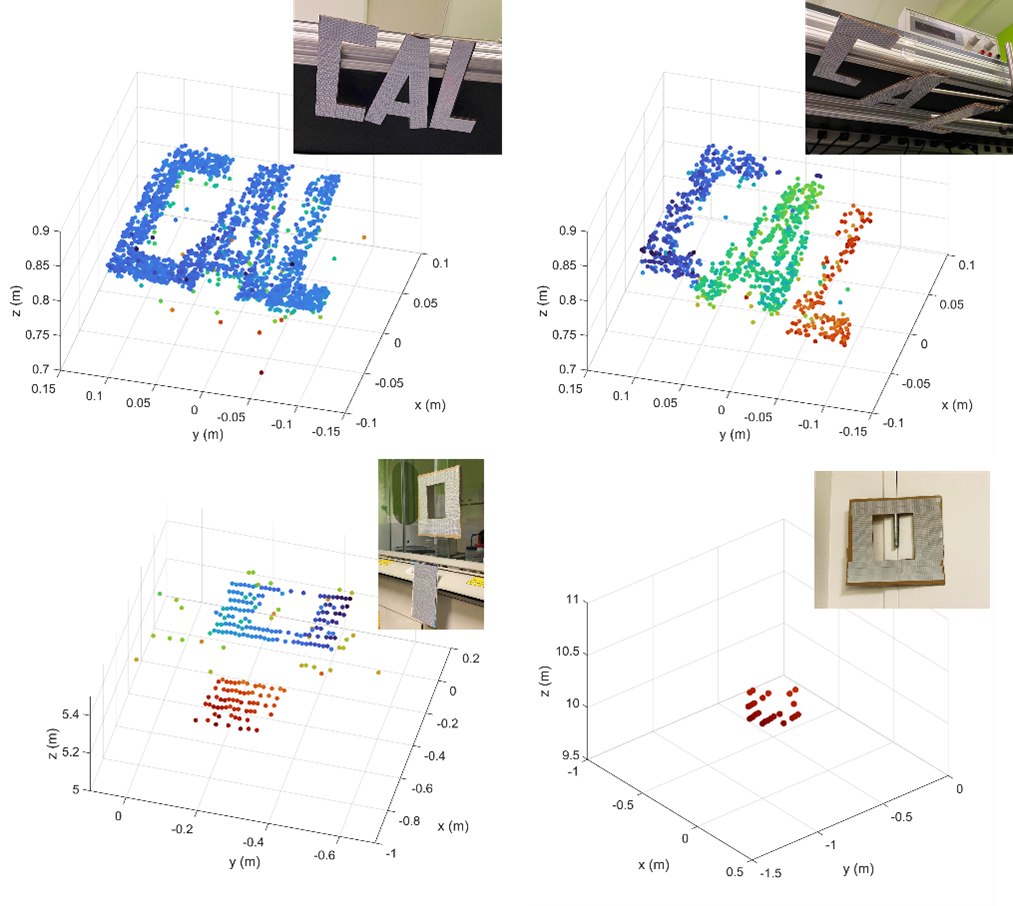
圖4 激光雷達(dá)測得的三維點(diǎn)云和對應(yīng)實(shí)物照片
圖源:張曉聲,加州大學(xué)伯克利分校
未來展望
要進(jìn)一步提高焦平面開關(guān)陣列的像素數(shù)、分辨率和掃描范圍以更好地適應(yīng)激光雷達(dá)系統(tǒng)的需求,需要在芯片上集成更多數(shù)量的光開關(guān)和天線,并且縮小單元尺寸。該研究團(tuán)隊指出,通過進(jìn)一步優(yōu)化微機(jī)電系統(tǒng)光開關(guān)的設(shè)計,有望將單元尺寸縮小到 10 微米,進(jìn)而在 1 cm2 的芯片上集成 1000x1000 像素的固態(tài)激光雷達(dá),并實(shí)現(xiàn)優(yōu)于0.1°的掃描分辨率。
未來大規(guī)模固態(tài)激光雷達(dá)的實(shí)現(xiàn),或?qū)O大地擴(kuò)展激光雷達(dá)三維傳感器的應(yīng)用場景和適用范圍,使人們可以更方便地獲取三維信息,智能機(jī)器可以更精確地感知周圍環(huán)境,為生產(chǎn)生活提供更大的便利。
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2557文章
51912瀏覽量
759979 -
芯片
+關(guān)注
關(guān)注
459文章
51744瀏覽量
431104 -
激光雷達(dá)
+關(guān)注
關(guān)注
970文章
4100瀏覽量
191231
原文標(biāo)題:Nature | 指尖大小的激光雷達(dá)芯片
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
FRED案例:矩形微透鏡陣列
大功率半導(dǎo)體激光器陣列的封裝技術(shù)
微透鏡陣列后光傳播的研究
通過微透鏡陣列的傳播
VirtualLab Fusion應(yīng)用:畸變分析儀
通過微透鏡陣列的傳播
光譜共焦應(yīng)用測量之手機(jī)玻璃屏幕平面度測量
立儀科技:光譜共焦傳感器在玻璃領(lǐng)域的革命性突破

推焦除塵物聯(lián)網(wǎng)系統(tǒng)解決方案
汽車 ECU 設(shè)計中的有源整流及其優(yōu)勢

新品來襲 | 500V-800V 平面柵VDMOS,自有封裝優(yōu)勢,雪崩耐量高, EMI兼容性好, 抗沖擊能力強(qiáng)!

紅外陣列弧光的原理和優(yōu)勢是什么?
TMAG5123平面高精度高壓霍爾效應(yīng)開關(guān)數(shù)據(jù)表
TMAG5123-Q1 汽車類平面高精度高壓霍爾效應(yīng)開關(guān)數(shù)據(jù)表
深視智能光譜共焦位移傳感器檢測透明玻璃平面度重復(fù)性






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論