 如何DIY一個帶遙控器的紅外 (IR) 遙控車
如何DIY一個帶遙控器的紅外 (IR) 遙控車
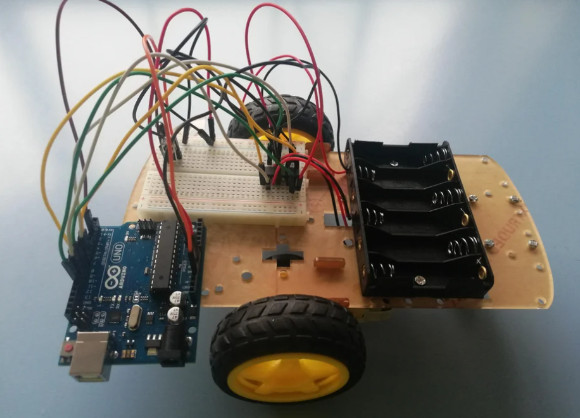
該項目是科學博覽會、機器人競賽和大學項目的理想選擇。該設計適應性強,您可以輕松修改并添加自己的組件。請按照以下說明構建遙控汽車。
* 安全須知:
不使用時將電池從汽車中取出。如果您無法看到/監督汽車,請將電池取出
不要讓電路過載短路。比如電路過熱時,應立即停止運行
如果您使用自己的電源,為了確保安全,請使用低于 12 伏的電壓
第 1 步:準備補給品
電視遙控器(確保其電池已充電)
6X AA 可充電* 電池
一把十字螺絲刀
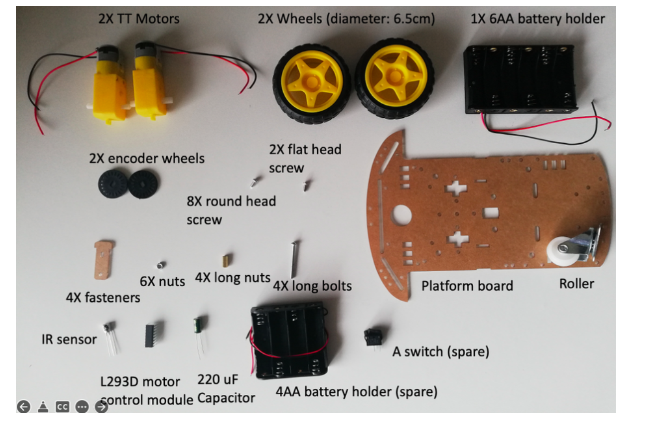
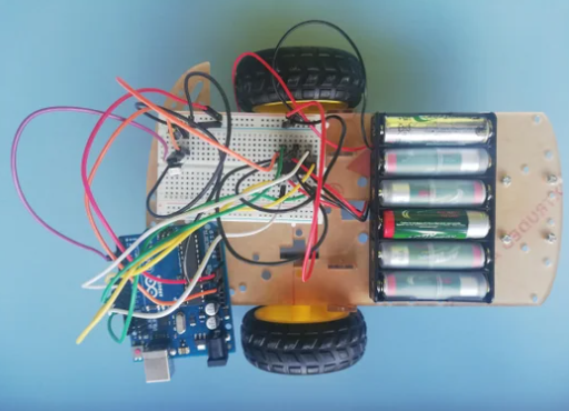
要在沒有套件的情況下制作該項目,請參考上圖中的組件明細。
*建議使用可充電的,因為 DIY 車的電源效率通常較差,并且會很快耗盡電池電量
視頻中的時間戳:
0:17 組裝底盤和電機
4:30 電子產品
5:48電路圖
5:54 軟件(Arduino 代碼)
7:50 駕駛演示(含精準模式代碼)
8:20 駕駛演示(附賽車模式代碼)
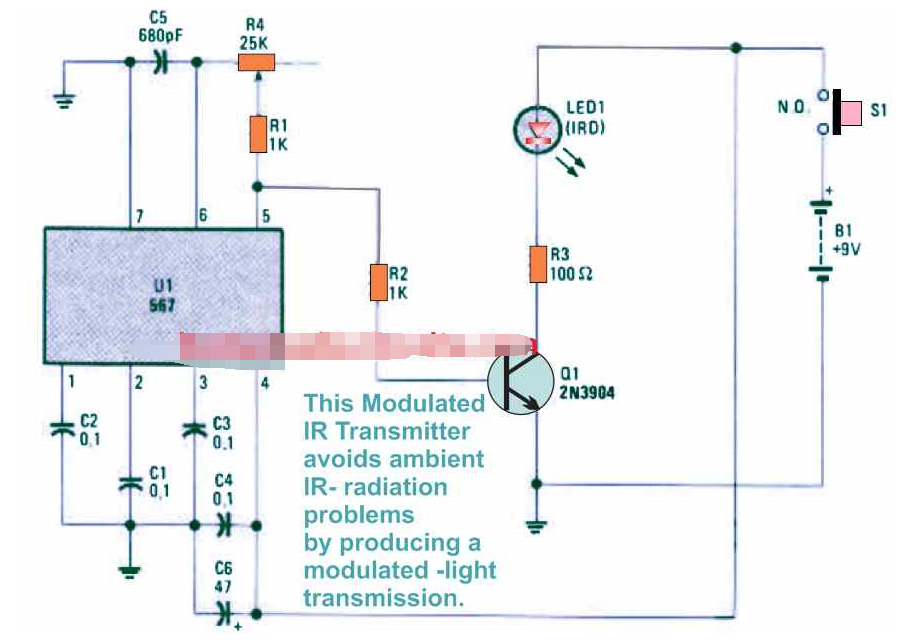
第 2 步:電路圖接線
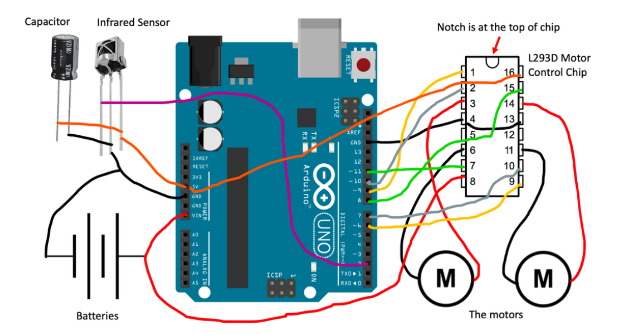
按照上圖接線。
第 3 步:Arduino 代碼
提供兩種模式:
精確模式:當它向左/向右轉動時,它在一個固定軸上旋轉(參見時間戳 7:49 的步驟 1 視頻)
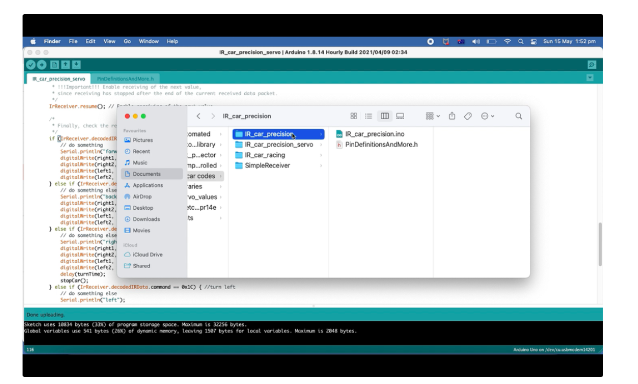
下載“IR_car_precision.ino”和“PinDefinitionsAndMore.h”,
然后將它們保存到名為“IR_car_precision”的文件夾中
要改變汽車的速度,找到變量“carSpeed”并改變它
要更改汽車左/右轉的速度,請更改變量“turnTime”
賽車模式:它向左/向右轉,同時前進,就像一輛現實生活中的公路車。(參見時間戳 8:19 處的步驟 1 視頻)
下載“IR_car_racing.ino”和“PinDefinitionsAndMore.h”,
然后將它們保存到名為“IR_car_racing”的文件夾中
要更改汽車的速度,請找到變量“upperSpeed”和“lowerSpeed”
要更改汽車左/右轉的速度,請更改“upperSpeed”和“lowerSpeed”,因此它們之間的差異更大/更小
相關代碼下載:
IR_car_precision.ino
PinDefinitionsAndMore.h
IR_car_racing.ino
第 4 步:修復常見錯誤
如果您沒有任何錯誤,請跳過此步驟(恭喜!)
Arduino 不響應紅外信號。
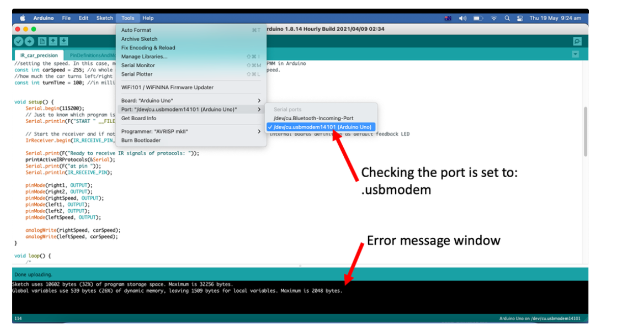
進入 Arduino 的串行監視器,它會為您提供信息
檢查電視遙控器的電池是否有電
您是否更改了“命令”編號,該編號顯示在第 1 步的視頻中,時間戳為 7:15?
您是否將電容器插入電路?
將汽車移近電視遙控器
電機不動,或非常微弱。
用萬用表或電壓表測量電池座黑線和紅線之間的電壓。然后測量 L293D 芯片的引腳 8 和 4 之間的電壓,當它連接到電池時。如果兩個電壓測量值中的任何一個低于 7 伏,請更換充滿電的電池。
確保 L293D 的引腳 16 連接到 Arduino 上的 5V。
每個電機的兩根電線都已正確插入
汽車不能直行。
預計會與直線路徑有一點偏差,而且幾乎沒有什么可以做的。
確保車輪安裝正確并相互平行
確保 L293D 的引腳 16 連接到 Arduino 上的 5V。
嘗試所有命令:向前、向后、向左、向右和停止。你可能把鑰匙弄混了。
對于所有問題。
確保一切都按照步驟 2 的圖表連接
閱讀 Arduino IDE 底部黑色窗口中的錯誤消息。將錯誤消息復制到 Google。
轉到 Arduino 中的工具,確保板是“Arduino UNO”。端口是usb,不是藍牙。
第 5 步:自定義獨一無二的紅外小車
要設計自己的汽車,您需要了解:
Arduino 上的引腳 0、1 和 13 是特殊的,因此請避免使用它們。引腳 2 為紅外傳感器預留。
為了穩定運行,Arduino UNO 板需要通過其 Vin 端口提供 7 到 12 伏的電源。這就是為什么此設計使用六節可充電 AA 電池(一節可充電AA 的電壓約為 1.2V,因此 6 X 1.2 = 7.2 》 7 伏。
L293D 電機控制芯片通過其引腳 8 需要 4.5 到 36 伏的電源。
L293D 還具有鉗位二極管,以防止感應反激(又名反激電壓)電壓尖峰。所以如果你想更換它,替代品也需要提供這種保護。
電容器使 Arduino 上 5V 引腳的電壓保持恒定,因為電容器兩端的電壓不能瞬時改變。恒定電壓對于非常敏感的紅外傳感器至關重要。
如果紅外傳感器在添加伺服電機(或任何其他類型的感性負載)后停止工作,請將 220 μF 電容更換為更大的電容,以增強 Arduino 上 5V 引腳的電壓恒定性。
-
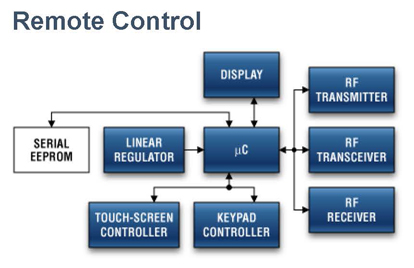
遙控器
+關注
關注
18文章
837瀏覽量
66133 -
遙控車
+關注
關注
9文章
81瀏覽量
23730 -
Arduino
+關注
關注
188文章
6469瀏覽量
187091
發布評論請先 登錄
相關推薦
無線遙控器的IR應用解決方案
Android手機遙控車設計實例分析







 工商網監
工商網監
評論